
Fターム[2F065HH07]の内容
光学的手段による測長装置 (194,290) | 入射光 (9,091) | 強度分布 (4,196) | コード化パターン光 (370)
Fターム[2F065HH07]に分類される特許
161 - 180 / 370
構造化光を用いる欠陥検出のための方法及び装置

構造化光を用いて、製造された物品(94)の合い具合及び仕上がりについての問題を検出する改善された方法及び装置。反対方向から取得される2つ以上構造化光画像(92、98)を用いて、継ぎ目の付近の小さい欠陥によって引き起こされる誤検出を回避しながら、接合面の合い具合を測定する。 (もっと読む)
三次元形状測定装置

【課題】上述した実情に鑑み、簡単な構成で、空間コード化用パターン光を用いた三次元形状測定の測定分解能を向上させる技術を提供する。
【解決手段】三次元形状測定装置は、空間コード化用パターン光が投影されている測定対象物の撮影画像から空間コード画像を生成する第1パターン画像処理部33と、濃度が周期的に連続変化する濃淡パターンを有する領域分割用パターン光が所定シフト量でシフトしながら投影されている測定対象物の撮影画像から加重平均演算を通じて加重平均画像を生成する加重平均画像生成部34bと、空間コード画像と加重平均画像とを合成してパターン合成画像を生成するパターン合成画像生成部35と、パターン合成画像に基づいて測定対象物の三次元形状を求める三次元形状演算部41とを備えている。
(もっと読む)
形状測定装置および方法、並びにプログラム
【課題】より簡単に測定精度を向上させる。
【解決手段】測定部21は、被検物12にパタン光を投光し、被検物12において反射したパタン光の観察画像を撮像する。撮像画像の撮像は、投光されるパタン光の焦点面Sと被検物12との相対的な位置を変化させながら行われる。合焦測度算出部23は、観察画像上のパタン光の像であるパタンについて、パタンの位置を示すパタン位置情報を生成するとともに、合焦測度を算出する。パタン移動角度算出部24は、各パタンの焦点面Sごとの合焦測度およびパタン位置情報に基づいて、各パタンについて、パタン光の主光線のCCD41への入射角度を、被検物12の形状の測定結果の信頼度を示すパラメータとして算出する。本発明は、3次元形状測定装置に適用することができる。
(もっと読む)
形状測定方法及び装置
【課題】光沢面を持つ被測定物や複雑な形状の被測定物であっても正確にパタンを読み取ることができ、形状認識能力の高い形状測定方法及び装置を提供する。
【解決手段】プロジェクタ5で初期パタンを被測定物9に投影し、カメラ1,3で初期パタンが投影された被測定物9を撮影し、カメラ1,3で撮影した画像の明度を読み取り、読み取った画像の明度が設定した目標明度よりも明るい部分は暗く、暗い部分は明るくして測定用パタンを決定し、測定用パタンを被測定物9に投影してカメラ1,3で撮影し、撮影した画像から被測定物9の形状を求める。
(もっと読む)
3次元形状測定装置および3次元形状測定コンピュータプログラム
【課題】投影器および撮像器における出力特性のリニアリティーに依存することなく、被測定物の3次元形状測定を高精度に行うことができる3次元形状測定装置を提供する。
【解決手段】3次元形状測定装置は、プロジェクタ10、撮像器20およびコンピュータ装置30を備えている。プロジェクタ10は、明部Rと暗部Dとで1周期が構成された明暗縞状パターンZPを一定の間隔で1周期分ずらしながらワークWKの表面に投影する。撮像器20は、ワークWKに投影された明暗縞状パターンZPを撮像して1周期分の明暗縞状パターン画像Gnを取得する。コンピュータ装置30は、明暗縞状パターンGnを位相が異なる4つのサインカーブによって変調した後、各明暗縞状パターンGnを合成して明暗縞状パターン合成画像SGkを計算する。そして、これら4つの明暗縞状パターン合成画像SGkにおける同一位置の位相を計算し、三角法を用いてワークWKの3次元形状を計算する。
(もっと読む)
複数の色彩の発光体による光学式認識データの表示方法及びマーキング方法、並びに発光デバイス、並びにデータ及び位置検出方法
【課題】離間した被印物の位置を測定し、その対象物が自動認識データを表示することを可能にする技術を提供する。
【解決手段】所定のR(赤)の発光体、G(緑)の発光体、Bの発光体、これらの点灯状態を制御する制御装置、とを含む発光デバイスを被印物に取り付け、所定の発光パターンで発光させる。発光パターンは所定の記憶手段に格納しておく。この発光パターンは、時間軸に沿って色彩が変化することによって所望のデータを表す時間変化型光学式認識コードを形成する。この結果、従来の複数の色彩を多数並べて構成する2次元的な光学式認識コードと比較して、小面積で光学式認識コードを実現している。また、CCDカメラ等でこの発光デバイスを撮像することによって、その発光デバイスの位置、すなわち被印物の位置を知ることができる。この動作を継続的に行えば、被印物の動きの追尾が可能となる。
(もっと読む)
形状測定装置
【課題】簡単な構成により、被検物体の表面に光学的に異質な部分があっても、正確に被検物体の形状測定ができる形状測定装置を提供する。
【解決手段】被検物10に所定の照射パターンを有する照明光を照射するスリット投影光学系2と、スリット投影光学系2と異なる光軸を有し、被検物10からの光を撮像素子7の撮像面に結像させる少なくとも物体側テレセントリックな撮像光学系4〜7と、撮像素子7からの信号を用いて被検物10の形状を算出する演算部とを備えた形状測定装置であって、スリット投影光学系2と撮像光学系4〜7とは、相対的位置関係を同一に保ったまま、撮像光学系4〜7の光軸方向に移動可能とされていることを特徴とする形状測定装置。
(もっと読む)
三次元形状計測装置
【課題】 光切断法による三次元形状計測において、測定対象物の形状を比較的に少ない処理能力で精度よく計測できる手段を提供する。
【解決手段】 三次元形状計測装置は、測定対象物に対してパターン光を照射する投光部と、撮像部と、輝度条件調整部と、制御部と、演算部を備える。撮像部は、パターン光によって測定対象物の表面に形成されるパターンを含む画像を撮像する。輝度条件調整部は、画像の輝度に影響を与えるパラメータのうち少なくとも1つを変化させる。制御部は、測定対象物とパターン光とを所定方向に相対的に走査させるとともに、パターン光の走査位置がそれぞれ相違する複数の画像を上記のパラメータを変化させながら取得する。演算部は、複数の画像のうちで輝度レベルが所定範囲に収まるものを対象画像として抽出し、該対象画像に対応するパターンの輝度情報を用いて測定対象物の三次元形状を求める。
(もっと読む)
3次元形状計測方法およびそのシステム
【課題】従来の3次元形状計測装置は、三角測量を用いるものはオクルージョンが起こり複雑な形状のものの計測が困難であった。一方、デフォーカス量から計測するものは、高い精度を出すことが困難であった。
【解決手段】デフォーカス量から距離を計測する手法を応用することで、投光系と受光系の光軸を同一にし、オクルージョンを抑えるとともに、位相シフト法の投影パターンを用いることで、各画素独立に高精度で投影パターンの場所を特定しデフォーカス量を高精度に計測することで、高精度3次元形状計測を可能とした。
(もっと読む)
口腔内測定方法および口腔内測定装置
【課題】口腔内を正確に形状計測することが可能な口腔内測定方法および口腔内測定装置を提供する。
【解決手段】口腔内測定方法は、投光工程と、撮像工程と、露光時間制御工程と、画像合成工程と、三次元演算工程とを備えている。投光工程は、コード化された縞パターンを投影する。撮像工程は、縞パターンが投影された領域を二次元静止画像として取り込む。露光時間制御工程は、撮像工程において二次元静止画像を最適に取り込めるように露光時間を制御する。画像合成工程は、少なくとも2つの異なる露光時間によって取り込んだ二次元静止画像を合成して、合成二次元静止画像を生成する。三次元演算工程は、合成二次元静止画像に基づいて口腔内の三次元座標を演算する。
(もっと読む)
形状測定装置
【課題】三次元形状を高精度に測定する。
【解決手段】パタン拡散板13により、所定のパタンを有する拡散光が、被検物17に照射され、撮像装置14により、被検物17がパタン拡散板13とは異なる方向から撮像される。また、パタン拡散板13が、撮像装置14の撮影方向に沿った方向に、相対的に所定の移動量を移動させされる。そして、パタン拡散板13の移動の前後で撮像装置14により撮像された2枚以上の画像に基づいて、パタン拡散板13の移動に応じて、撮像装置14の光軸上にある被検物17の表面の測定点に映り込むパタンの位置の変化が解析され、その変化、移動量、および、撮像装置14の光軸上の基準点とパタン拡散板13との距離に基づいて、基準点から被検物17の表面の測定点までの距離が算出される。本発明は、例えば、三次元形状を測定する形状測定装置に適用できる。
(もっと読む)
位置姿勢認識装置
【課題】同一形状の部品が乱雑に山積みされた部品群に対してもビンピッキングを可能とする位置姿勢認識装置及び方法、並びに上記位置姿勢認識装置を備えたピッキングシステムを提供する。
【解決手段】ワークピース80が山積みされたシーンを撮像すると同時に、その画素毎にシーンの奥行きを計測する手段20を設け、画像から抽出される直線状明領域に対してシーンの奥行き情報から、その3次元的姿勢を計算するようにした。
(もっと読む)
3次元形状計測装置及び3次元形状計測方法
【課題】コスト上昇を抑えながら比較的に短時間で被計測物の3次元形状を計測する。
【解決手段】位相シフト法を利用した3次元形状計測において必須となる正弦波状の縞パターンの各々において、1周期毎に正弦波の振幅Anを変化させた投影パターンを生成して被計測物Mに投影して撮像する。振幅の違いから周期を推定して相対位相を位相接続できることから、特許文献2に記載されている従来例のように高価な投影装置や撮像装置を用いる必要が無く、その結果、表面に段差や孔のある物体の3次元形状をコスト上昇を抑えながら少ない撮像回数で計測することができる。
(もっと読む)
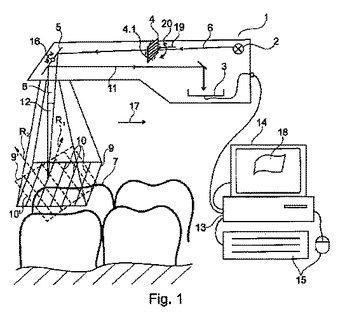
三角法を用いた物体の光学的測定方法
本発明は、三角法を用いて光学記録装置(1)によって物体を測定する方法に関する。第1のシャッター手段(3.1)によって第1のパターン(11.1)が生成され、記録対象物体(8)に第1の投影ビーム(7.1)として投影される。少なくとも1つの別のシャッター手段(3.1〜3.4)によって別のパターン(11.2〜11.4)が生成され、記録対象物体(8)に別の投影ビーム(7.2〜7.4)として投影される。第1のパターン(11.1)と別のパターン(11.2〜11.4)は物体(8)から観察ビーム(13.1〜13.4)として反射され、物体の3Dデータセット(21)を得るために少なくとも1つの記録手段(6、6.1、6.2)によって記録される。投影された第1のパts−ン(11.1)と別のパターン(11.2〜11.4)は少なくとも1回の三角法記録(20、53、54)で少なくとも1つの記録手段(6、6.1、6.2)を用いて同時に記録される。
 (もっと読む)
(もっと読む)
物体の三次元形状を光学的に測定する方法
本発明は、3Dデータセットを得るために被走査物体(7)上にパターン(9、9’)を投影し、投影パターン(9、9’)を画像(40、41)に記録する、三角測量法によって物体の三次元形状を光学的に測定する方法に関する。少なくとも1枚の第1の画像(40)を作成する第1の工程において、第1のパターン(9)を投影し、少なくとも1枚の別の画像(41)を作成する第2の工程において、位置または形状に関して第1のパターン(9)からずれている別のパターン(9’)を被走査物体(7)上に投影して画像(41)を作成する。第1の画像(40)と別の画像(41)は、少なくとも1つの共通点(44)を含む。前記画像(40、41)から得られた3Dデータが3Dデータセットにおける共通点(44)の3Dデータを基準にして少なくとも一致するように、少なくとも1つの共通点(44)の3Dデータに基づいて、画像(40、41)から得られた3Dデータを次の工程で合成する。
 (もっと読む)
(もっと読む)
形状測定装置および表面状態測定装置
【課題】鏡面と拡散面とが混在するような被検物においても、精度良く表面形状を測定する。
【解決手段】投光板2は、異なる配光特性の光源1−1乃至1−3の光を、大凸部2a,小凸部2bで拡散させて被検物4に投光する。角度測定部5bは、配光特性毎に、撮像部3により撮像された被検物4に映り込んだ投光部2の大凸部2aにより反射されてくる光の強度比に基づいて、投光角θLを算出する。三角法測定部5cは、基線長Lb、撮像角θc、および投光角θLで、三角法により被検物4の表面形状を測定する。光切断法測定部5fは、被検物4に投光するスリット光発光部7を制御して、スリット光を発光させ被検物4上の陰影より測定する。選択部5eは、被検物4に映り込んだ小凸部2bの認識の有無で表面が拡散面または鏡面を判断し、光切断法または三角法を選択して、表面形状を測定させる。本発明は、形状測定装置に適用することができる。
(もっと読む)
形状測定装置
【課題】鏡面と拡散面とが混在するような被検物においても、精度良く表面形状を測定する。
【解決手段】投光板2は、異なる配光特性の光源1−1乃至1−3の光を、凸部2aで拡散させて被検物4に投光する。角度測定部5bは、配光特性毎に、撮像部3により撮像された被検物4に映り込んだ投光部2の凸部2aにより反射されてくる光の強度比に基づいて、投光角θLを算出する。三角法測定部5cは、基線長Lb、撮像角θc、および投光角θLで、三角法により被検物4の表面形状を測定する。本発明は、形状測定装置に適用することができる。
(もっと読む)
光学式検査方法
【課題】正反射度の高い立体面の照明飽和領域を減少させた第1映像を獲得し、立体面の周辺領域における格子映像がよく現れた第2映像を獲得した後、第1映像と第2映像とを合成し、この合成映像を基準映像と比較して、立体形状の形成されている検査対象の欠陥有無を判断することによって正確な映像を獲得する光学式検査方法を提供すること。
【解決手段】立体形状の形成されている検査対象物に格子縞を投影させ、該検査対象物の形状にしたがって変形された光を基準パターンと比較して検査対象物の欠陥有無を検査する光学式検査方法において、検査対象物の立体面の正反射度を下げて飽和領域が減少するように照明値を調節して第1映像を獲得する段階(S100)と、検査対象物における立体面の周辺領域に格子縞が明確に現れるように照明値を調節して第2映像を獲得する段階(S200)と、第1映像と第2映像とを合成する段階(S300)と、合成映像の分析を通じて検査対象物の不良有無を判断する段階(S400)とを含む。
(もっと読む)
対象物を3次元デジタル化する方法及び装置
【課題】従来よりも少ない測定労力で従来よりも高い測定精度を提供する。
【解決手段】本発明は、プロジェクタ及び1個以上のカメラを備えた3Dセンサを用いて対象物の3次元デジタル化を行う方法及び装置であって、該プロジェクタを用いて該対象物上にパターンを投影し、該1個以上のカメラを用いて該パターンを検出する、3次元デジタル化を行う方法及び装置に関する。本発明によると、該方法及び装置は、少なくとも3つの基準マーク及び/又は基準ラスタを、該3Dセンサを用いて該対象物上に投影し、2個以上の較正された外部デジタルカメラを用いて検出することを特徴とする。
(もっと読む)
三次元形状測定装置および該方法
【課題】本発明は、測定環境の明暗に依存することなくモニタ表示およびFOV表示をより良好に行うことができる三次元形状測定装置および該方法を提供する。
【解決手段】本発明における測定対象物の三次元形状を非接触で測定する三次元形状測定装置Diは、モニタ表示用の投光パターンを含む複数の投光パターンで光を投光する投光部1と、複数の投光パターンのうちの1つの投光パターンで光を投光するように投光部1の投光パターンを制御する投光制御部51と、投光制御部51が投光部1にモニタ表示用の投光パターンで光を投光させている場合に、撮像面に結像した光像を撮像する受光部2を備える。
(もっと読む)
161 - 180 / 370
[ Back to top ]