
Fターム[2F065HH07]の内容
光学的手段による測長装置 (194,290) | 入射光 (9,091) | 強度分布 (4,196) | コード化パターン光 (370)
Fターム[2F065HH07]に分類される特許
121 - 140 / 370
撮像装置及びその制御方法
【課題】撮像対象との距離を表す距離画像を生成する際に、撮像対象の光反射やその光沢などの外乱、測定原理等に起因する距離の誤差の低減を実現する。
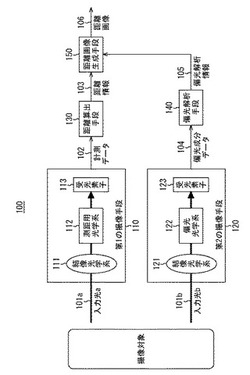
【解決手段】撮像対象との距離を計測するための画像を撮像する第1の撮像手段110と、第1の撮像手段110で撮像された画像に基づくデータを用いて撮像対象までの距離を算出する距離算出手段130と、偏光成分を計測するための画像を撮像する第2の撮像手段122と、第2の撮像手段122で撮像された画像に基づくデータを用いて偏光状態の解析処理を行う偏光解析手段140と、距離算出手段130で算出された距離に係る距離情報103及び偏光解析手段140で解析処理された偏光状態に係る偏光解析情報105に基づいて、撮像対象の距離画像106を生成する距離画像生成手段150を備える。
(もっと読む)
3次元距離認識装置

【課題】本発明は、ステレオカメラを利用した3次元距離認識装置を提供する。
【解決手段】本発明の3次元距離認識装置は、測定しようとする選択点の視差を検出するステレオビジョンカメラ110と、前記選択点が視差を発生させない物体である場合、パターン柄を発生させて、前記パターン柄を前記選択点に投映させるパターン発生装置120とを具備することで、測定しようとする物体が単色の平面や透明な硝子の場合でも、測定しようとする選択支点の距離を正確に認識することができるという長所がある。
(もっと読む)
三次元形状測定装置及び三次元形状測定方法
【課題】パターン投影型の三次形状測定の原理に起因する測定誤差を抑えること。
【解決手段】本発明の三次元形状測定装置を例示する一態様は、測定対象物上に縞パターンを投影する投影手段(13)と、測定対象物上に投影される縞パターンの位相を変化させながら、その測定対象物の撮像を繰り返すことにより、測定対象物上の各位置から輝度変化データを取得する撮像手段(14)と、測定対象物に対する縞パターンのフォーカス位置を変化させながら、輝度変化データの取得を繰り返し実行させることにより、測定対象物上の各位置から輝度変化データを複数ずつ取得する制御手段(101)と、制御手段が取得した複数の輝度変化データの中から信頼性の高いものを選出する選出処理を、測定対象物上の各位置について行う選出手段(100)と、測定対象物上の各位置について選出された輝度変化データによって表される各位置の座標を、測定対象物の面形状として求める形状算出手段(100)とを備える。
(もっと読む)
非接触形状測定装置
【課題】熱間鍛造異形品の形状評価の量産工程へのインライン化を可能とする非接触形状測定装置を提供する。
【解決手段】非接触形状測定装置130は、回転テーブル131、ロボット141、エアブロー部151、参照ポイント設定部161、および、デジタイザ装置171を備えている。エアブロー部151は、回転テーブル131上のクランクシャフト200の上側に移動し、エアーノズル152からクランクシャフト200にエアを吹き付ける。続いて、参照ポイント設定部161は、回転テーブル131上のクランクシャフト200の上側に移動し、クランクシャフト200表面に参照ポイントを設定する。次いで、デジタイザ装置171は、クランクシャフト200の計測位置に応じた位置調整後、スキャニングによりクランクシャフト200の形状測定を行う。
(もっと読む)
光学式ゲージ及び3次元表面プロファイル測定方法
【課題】
【解決手段】3次元表面プロファイル測定のための小視野を有する光学式ゲージ(10)は、光源(22)と、照射光路に沿って光を誘導する照射光学系(28、30、42)とを有するプロジェクタ(20)を含む。光学格子装置(34)は、照射光路に配置され、構造化光パターン(46)を照射するために照射光の分布を変更する。移相装置(47)は、前記被測定表面(80)上の所望の位相ずれを伴う少なくとも3つの位置へ構造化光パターンを移動する。ビューア(50)は、照射光路と平行ではない観察光路を有する観察光学系と、前記表面からの構造化光パターンの拡散反射の画像を感知する光感知アレイ(58)と、画像を記録するカメラ(57)とを含む。光学式ゲージは、カメラと通信するデータ入力部と、画像から得られる表面輪郭情報に基づいてプロファイリング対象表面をモデル化するプロセッサとを具備するコンピュータ(61)をさらに含む。
(もっと読む)
三次元表示を使用する物理パラメータの推定
三次元表示を使用して物理パラメータを推定するための、方法、システム、および装置。一態様では、既定の光パターンを対象物上に投影し、この投影光パターンと対象物の一部分との相互作用から生じる光パターンを検出する。この検出光パターン内の複数の光要素の三次元位置を判定し、この位置に基づいて、対象物の物理パラメータ、例えば重量を推定する。例えば、この方法、デバイス、およびシステムを使用して、家畜動物などの対象物の少なくとも一部分の三次元表示を作り出すことができる。 (もっと読む)
三次元計測装置
【課題】位相シフト法を利用した三次元計測を行うにあたり、計測精度の低下を抑制することのできる三次元計測装置を提供する。
【解決手段】三次元計測装置を具備する基板検査装置は、クリームハンダの印刷されてなるプリント基板の表面に対し、縞状のパターン光と光強度及び位相が一定の均一光を照射する照射装置と、プリント基板上の照射された部分を撮像するCCDカメラと、撮像された画像データに基づきプリント基板上の計測対象点における高さ計測を行う制御装置とを備えている。制御装置は、各画像データ毎に均一光が照射された補正エリア51内にて検出されるプリント基板上のマーク70の位置を特定し、これらの相対位置関係に基づき、複数通りの画像データ相互間の位置ズレ量(Δx,Δy)を補正する。さらに、パターン光の位相ズレ量を補正した上で、プリント基板上の計測対象点における高さ計測を行う。
(もっと読む)
三次元形状計測装置及び三次元形状計測方法
【課題】物体の三次元形状を迅速に精度良く計測する。
【解決手段】短波長の光パターン20及び長波長の光パターン30の各々を物体2に投射するプロジェクタ3と、光パターン20、30が投射された物体2を撮影するカメラ4と、カメラ4の撮影画像に基づいて、光パターン20、30の相対位相を算出し、算出した光パターン30の相対位相に基づいて、光パターン20の相対位相と絶対位相との間のオフセット値を求め、該オフセット値と、算出した光パターン20の相対位相とに基づいて、物体2までの距離Zを求める制御部5とを備え、光パターン30の波長(長波長)を光パターン20の波長(短波長)の非整数倍の長さとし、光パターン30の相対位相と光パターン20の相対位相との対応関係を光パターン30の周期毎に異ならせた三次元形状計測装置。
(もっと読む)
三次元計測装置
【課題】位相シフト法を利用した三次元計測を行うにあたり、より高精度な計測をより短時間で実現することのできる三次元計測装置を提供する。
【解決手段】三次元計測装置を有する基板検査装置は、クリームハンダの印刷されてなるプリント基板に対し縞状の光パターンを照射する照射装置と、プリント基板上の照射された部分を撮像するCCDカメラと、これにより撮像された画像データに基づき三次元計測を行う制御装置とを備えている。制御装置は、周期2μmの第1光パターンを第1位置にて照射して得られた画像データに基づき各画素毎の第1高さデータを算出する。また、半画素ピッチ斜めにずれた第2位置にて、周期4μmの第2光パターンを照射して得られた画像データに基づき各画素毎の第2高さデータを算出する。そして、第2高さデータを基に、各第1高さデータの縞次数を特定し、当該第1高さデータの値を縞次数を考慮した値に置き換える。
(もっと読む)
三次元計測装置
【課題】テレセントリック光学系を用いることなく、計測精度の向上を図ることのできる三次元計測装置を提供する。
【解決手段】三次元計測装置を具備する基板検査装置は、クリームハンダの印刷されてなるプリント基板の表面に対し縞状のパターン光を照射するための照射装置4と、プリント基板上の照射された部分を撮像するためのCCDカメラ5と、CCDカメラ5により撮像された画像データに基づきプリント基板上の各座標位置における高さ計測を行う制御装置とを備えている。また、制御装置は、CCDカメラ5のレンズ5aの画角により生じ得る計測データのズレを、CCDカメラ5の高さLcoと、プリント基板に対し照射されるパターン光の照射角αとに基づき補正する。
(もっと読む)
結像光学系及び面形状測定装置
【課題】軸上色収差量が可変の結像光学系を提供する。
【解決手段】結像光学系は、結像レンズ3と、結像レンズ3の光軸方向に移動可能な第1レンズ1及び第2レンズ2とを備え、第1レンズ1及び第2レンズ2のうち少なくとも一方のレンズを光軸方向に移動させることにより結像光学系の軸上色収差量が可変的に調節され、第1レンズ1及び第2レンズ2の光軸方向の位置関係を変化させることにより、軸上色収差量の変動に伴う結像光学系の倍率色収差の変動が抑制される。
(もっと読む)
三次元形状計測装置及び三次元形状計測方法
【課題】物体の三次元形状を迅速に精度良く計測する。
【解決手段】三次元形状計測装置は、短波長及び長波長の光パターン20、30の各々を物体2に投射するプロジェクタ3と、物体2を撮影するカメラ4と、距離Z1と対応付けて光パターン20の絶対位相を登録した第1テーブル40と、距離Z2と対応付けて光パターン30の相対位相及び光パターン20のオフセット値nを登録した第2テーブル50と、撮影画像に基づいて光パターン20、30の相対位相を算出し、第1及び第2テーブル40、50を利用して物体2までの距離を求める制御部5とを備える。制御部5は、光パターン20の相対位相が0、2π又はそれらの近傍の値であるときに、光パターン30の相対位相と第2テーブルを照合して得られる距離Z2と、光パターン20の絶対位相と第1テーブル40を照合して得られる距離Z1とを対比し、両者が適合しないときにオフセット値nを変更する。
(もっと読む)
形状測定装置およびプログラム
【課題】重複画像における誤対応点を自動判定することで、三次元形状の測定に必要な初期値を始めとする測定値を自動で取得する。
【解決手段】
形状測定装置1は、重複撮影領域で測定対象物18を撮影する撮影部2〜9と、撮影部2〜9によって撮影された重複画像における測定対象物18の特徴点の位置を対応付ける特徴点対応付部21と、特徴点対応付部21で対応付けた特徴点に基づき、測定対象物18のモデルを形成する測定モデル形成部23と、測定モデル形成部23で形成した測定モデルと、別の測定対象物の基準モデルとに基づいて、誤対応点を判定する誤対応点判定部24と、誤対応点判定部24で誤対応点と判定された点を除いた特徴点の位置等に基づき、測定対象物18の三次元形状を求める三次元形状測定部25とを備える。
(もっと読む)
パターン光発光装置
【課題】配線等の製造作業の煩雑さの少ない三次元形状計測用のパターン光発生装置を提供する。
【解決手段】LEDチップは、線状LED素子が当該素子の延伸方向に垂直な方向に沿って複数配列されてなる素子アレイを備える。この素子アレイは、半導体プロセスにより生成される。各線状LED素子は、それぞれ線状に延びるp側電極108を有しており、素子分離溝110により互いに分離されている。各線状LED素子は共通の基板120上に形成されており、その基板120の下側には全素子で共用されるn側電極130が形成される。
(もっと読む)
形状測定装置
【課題】投影されるパターンのピッチと対物レンズの開口数とを最適化して、十分な高さ検出精度を得ることができる形状測定装置を提供する。
【解決手段】形状測定装置1は、投影パターン13の像を、対物レンズ17の焦点面に結像して検査対象物Sに照射する照明光学系2と、検査対象物Sの像を結像する撮像光学系3と、検査対象物Sの像を検出して画像信号を出力する撮像素子21と、検査対象物S又は対物レンズ17を相対的に移動させて、撮像素子21により、合焦状態の異なる複数の像の画像データを取得して検査対象物Sの形状を得る制御部20と、を有し、対物レンズ17の焦点面に形成された投影パターン13の像のピッチ及び対物レンズ17の開口数が、撮像光学系3により、検査対象物Sから出射する回折光のうち、少なくとも3次の回折光までを取り込むことができるように設定する。
(もっと読む)
作業システム及び情報処理方法
【課題】 光切断法により対象物体の3次元情報を計測する作業システムにおいて、高い計測精度を実現する。
【解決手段】 ロボットアーム111と、前記ロボットアーム111先端部に配置されたハンド位置検出部114と、スリット光を照射するスリットレーザ投光器113と、ロボットアーム111とは独立した位置に固定され、対象物体160を撮像するカメラ120と、カメラ120による撮像により得られた対象物体160の画像データに含まれるハンド位置検出部114上に形成された光切断線に基づいて、スリット光の光切断面を算出し、該算出した光切断面と対象物体160上に形成された光切断線とに基づいて、対象物体160の位置及び姿勢を算出する計算機140とを備える。
(もっと読む)
能動的立体視によるタイヤ表面の凹凸評価
本発明は、タイヤPの表面のディジタル凹凸像を収集する装置であって、立体視像の収集のための2つのカラーカメラ(13a,13b)を有し、各カメラは、所与の原色(R,G,B)のためのN個の1次イメージセンサ(131a,132a,133a,131b,132b,133b)を有し、Nは、2以上であり、カメラは、照明手段(231,232,233)の使用によりタイヤ表面の所定の領域(Z)に向かって放出され(E)、タイヤ表面により反射された(F)光を収集するよう配置され、収集装置は、各々独立して且つ同一方向に沿ってカメラの原色(R,G,B)のうちの1つに対応した波長を持つ光を所与の幅(L1,L2・・・LN)の交互に並んだ照明バンド及び非照明バンドから成るフリンジ系(S1,S2・・・SN)に従って、タイヤ表面の領域(Z)上に同時に投射するN個の照明手段(231,232,233)を有することを特徴とする収集装置に関する。 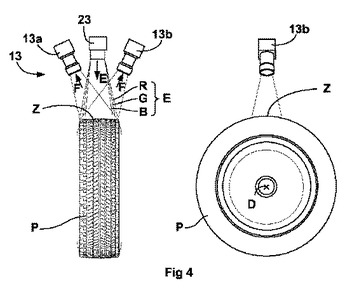 (もっと読む)
(もっと読む)
光ファイバ伝送路測定装置および光ファイバ伝送路測定システム
【課題】自動的な光ファイバ伝送路測定を可能にして、保守効率の向上を図る。
【解決手段】送信部1aは、光ファイバ伝送路の測定に使用する測定用パケットを生成し、光ファイバ伝送路を介して対向装置3へ送信する。受信部1bは、光ファイバ伝送路を介して対向装置3から折り返し戻ってきた測定用パケットを検出する。計測部1cは、測定用パケットの生成から検出するまでに要する時間であるパケット伝送時間を計測する。測定部1dは、パケット伝送時間にもとづいて、少なくとも光ファイバ伝送路の長さに関する、光ファイバ伝送路の測定制御を行う。折り返し部3aは、測定用パケットを測定装置10へ折り返し出力する。
(もっと読む)
3次元形状の測定方法及び測定装置
【課題】 3次元形状の測定方法及び測定装置を提供すること。
【解決手段】 本発明の3次元形状の測定方法は、データベースからフィーチャー情報を読み出し、ボードを測定位置に移動し、測定ヘッドをボードの検査領域に移動し、3次元測定のための第1光と2次元測定のための第2光とを検査領域に照射して、反射された第1反射イメージと第2反射イメージとを撮影し、フィーチャー情報と、第1反射イメージおよび第2反射イメージのうち少なくとも一つ以上とを比較して検査領域の歪曲を検査し、検査領域を再設定し、再設定された検査領域を検査することを含むことを特徴とする。本発明の測定方法によれば、3次元形状を正確に測定することができる。
(もっと読む)
多自由度干渉計
【課題】改良された多軸干渉計を提供すること。
【解決手段】装置は、複数の自由度に関する反射測定対象物の相対位置を測定する多軸干渉計を含み、この干渉計は、複数の自由度の内の異なる一つの自由度に関する測定対象物の相対位置についての情報を各々が含む複数の出力ビームを生成するように構成される。各出力ビームは測定対象物に共通経路に沿って少なくとも1回接触するビーム成分を含み、複数のビーム成分の内の少なくとも一つのビーム成分が、共通経路とは異なる第1経路に沿って測定対象物に対して少なくとも2回目の接触を更に行なう。
(もっと読む)
121 - 140 / 370
[ Back to top ]