
Fターム[2F065HH07]の内容
光学的手段による測長装置 (194,290) | 入射光 (9,091) | 強度分布 (4,196) | コード化パターン光 (370)
Fターム[2F065HH07]に分類される特許
101 - 120 / 370
高速高解像度三次元太陽電池検査システム
光学検査システム及び方法が提供される。加工対象物輸送機構が加工対象物(12)をノンストップで移動させる。照明装置(40)が、ライトパイプを含み、第一及び第二のストロボ照明野タイプを提供するように構成されている。第一(3)及び第二(5)のカメラ(2)アレイが、加工対象物(12)の立体画像化を提供するために配設されている。第一のカメラアレイ(3)は、第一の照明野を用いて加工対象物(12)の第一の複数の画像を生成し、第二の照明野を用いて加工対象物(12)の第二の複数の画像を生成するように構成されている。第二のカメラアレイ(5)は、第一の照明野を用いて加工対象物(12)の第三の複数の画像を生成し、第二の照明野を用いて加工対象物(12)の第四の複数の画像を生成するように構成されている。処理装置が、第一、第二、第三及び第四の複数の画像の少なくともいくつかを記憶し、他の装置に提供する。 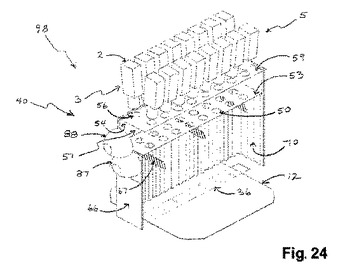 (もっと読む)
(もっと読む)
高速三次元計測装置及び高速三次元計測方法

【課題】被測定物の見かけの形状をできるだけ歪ませることなく形状計測できると共に、長い物や連続的に移動する物であっても形状計測できる高速三次元計測装置を提供する。
【解決手段】高速三次元計測装置は、被測定物の上に、一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射するパターン光源と、前記被測定物からの前記縞状パターン光の反射光を前記一つの方向に沿ったラインについて一組の光信号として取り込むラインカメラと、取り込んだ一組の前記光信号について、前記縞状パターン光との関係に基づいて前記被測定物の高さを算出する計測部と、を備える。
(もっと読む)
三次元測定装置

【課題】 本発明は、対象物の三次元形状を精度良く測定する三次元測定装置を提案する。
【解決手段】 三次元測定装置(100)は、試料(T)の表面からの反射光を結像する結像光学系(10)と、結像光学系を介して試料の表面を撮像する撮像部(15)と、結像光学系の焦点位置と試料の位置とを結像光学系の光軸方向に相対的に変化させながら撮像部で撮像して得た複数の画像に基づいて試料の三次元形状を算出する三次元算出部(17)と、を備える。そして結像光学系は、f*θ<h<f*tanθの関係を満たす。
ここで、f:結像光学系の焦点距離、h:結像光学系の光軸から試料の任意の点までの距離、θ:結像光学系の光軸と結像光学系から試料への主光線とのなす角とする。
(もっと読む)
走行機構測定用のレーザプロジェクタ
走行機構測定用のレーザプロジェクタ(2)は、レーザ光ビーム(8)を送出するレーザ光源(4)と、レーザ光ビーム(8)により照射されると、パターン化されたレーザ光パターン(9)を発生する光学素子(6)と、検出器(10)と、評価装置とを有している。検出器(10)は、動作中、パターン化されたレーザ光パターン(9)の少なくとも1つの領域により照射されるように配置されていて、この照射と相関する出力信号を発生する。評価装置は、検出器(10)により発せられた出力信号をまえもって定められた少なくとも1つの目標値と比較し、出力信号と目標値との大きな偏差を検出するとレーザ光源(4)をスイッチオフする。  (もっと読む)
(もっと読む)
計測方法及び装置、並びに露光方法及び装置
【課題】計測用の光学系を大型化することなく、投影光学系の光学特性を効率的にかつ高精度に計測する。
【解決手段】投影光学系PLの光学特性を計測する計測装置において、物体面の複数の計測点P(i,j)に配置される位相マーク20が形成されたレチクルマーク板RFMと、計測点P(i,j)に対応する像面上の位置に配置される周期パターン39が形成された蛍光膜35と、位相マーク20、投影光学系PL、及び周期パターン39を通過した照明光ILによって生成される検出光DLを検出面に導くFOP37と、検出光DLを検出する撮像素子38と、を備える。
(もっと読む)
3次元計測装置、その計測方法及びプログラム
【課題】
3次元計測装置と計測対象物体との間の位置及び姿勢の関係が高速に変化している場合であっても、装置構成を複雑化させずに、当該物体の位置及び姿勢の計測を精度良く行なえる。
【解決手段】
3次元計測装置は、計測対象物体の3次元形状モデルを保持するモデル保持手段と、計測対象物体の3次元形状を示す情報に基づいて計測対象物体における距離計測用の領域を決定する決定手段と、計測対象物体に対して所定の照明パターンを照射する照明手段と、当該照射が行なわれている状態で計測対象物体の画像を撮像する撮像手段と、当該撮像された画像内における距離計測用の領域に対応する領域に基づいて撮像手段から計測対象物体までの距離を示す距離情報を算出する距離算出手段と、距離情報と3次元形状モデルとに基づいて計測対象物体の位置及び姿勢を算出する位置姿勢算出手段とを具備する。
(もっと読む)
パターン形状計測方法、半導体装置の製造方法、およびプロセス制御システム
【課題】半導体デバイスの微細化に対して、プロセスマージンが狭小な場合でも半導体パターンの形状計測を高精度で行うことができるパターン形状計測方法を提供する。
【解決手段】パターン形状計測方法において、ベストマッチとなる計算波形が選出不可能な場合は、形状パラメータの内、少なくとも1つのパラメータを、パターン形状計測に依らない計測方法を用いる他計測装置にて得られた情報に基づいて固定値とし、再度、ライブラリと検出波形のマッチングを行い、ベストマッチとなる計算波形を選出するステップと、ベストマッチした計算波形より対象パターンの形状情報を求める。
(もっと読む)
3次元形状測定装置
【課題】3次元形状測定装置を提供すること。
【解決手段】3次元形状測定装置は、光を発生する光源ユニットおよび光源ユニットから発生された光を格子パターンを有する格子パターン光に変更する格子ユニットを含み、格子パターン光を所定方向から測定対象物に照射する照明部、および格子ユニットを格子パターンの延長方向および格子パターンの配置方向に対して所定の傾斜方向に移送させる格子移送ユニットを含む。よって、製造コストを低減して、3次元形状測定装置は容易に管理することができる。
(もっと読む)
レーザイメージングシステム
【課題】表面上のレーザターゲットなしで表面にレーザテンプレートを投影するためのレーザイメージングシステムを提供する。
【解決手段】レーザイメージングシステムは、光信号を発信する計測発信装置60と、航空機44の表面上にレーザテンプレートを投影するレーザ投影装置と、航空機44表面に対して前もって決められた位置に固定され、レーザ投影装置の視界の範囲外であって、かつ計測発信装置60の視界の範囲内にある第1の計測受信装置70と、レーザ投影装置のレーザの位置と方向とを決定すべく、レーザ投影装置の視界の範囲内においてレーザ投影装置に対して前もって決定された位置に固定された第2の計測受信装置と、第2の計測受信装置が配置されるフレームアセンブリ46と、フレームアセンブリ46に配置された複数のレーザターゲットと、を備える。
(もっと読む)
三次元計測装置、及び三次元計測方法
【課題】演算負担を軽減しつつ、表面形状の検出精度を向上させる。
【解決手段】先ず第一の照射パターンを計測対象に向けて照射し(ステップS2)、計測対象に映る反射パターンを撮像する。そして、計測対象における注目領域の座標Gを算出し(ステップS8)、照射パターンの空間周波数に対する反射パターンの変化度合(dα/dθ)を算出する(ステップS9)。そして、座標Gと変化度合(dα/dθ)とに応じて、注目領域におけるX軸周りの傾きβ1を算出する(ステップS10)。第一の照射パターンを照射した全ての領域でX軸周りの傾きβ1を算出できたら(ステップS12の判定が“Yes”)、今度は第二の照射パターンを照射する(ステップS4)。以降は、第一の照射パターンと同様に、注目領域におけるY軸周りの傾きβ2を算出し、第二の照射パターンを照射した全ての領域で行う。
(もっと読む)
頭顔部表面微小領域の繰り返し定位による撮像と毛髪計数の方法
【課題】頭顔部表面の微小領域を正確に繰り返し定位することで、頭顔部表面の微小領域の微視的な経時変化を追跡する方法を実現する。
【解決手段】頭顔部と能動光学装置を含んで3次元世界空間を構成し、頭顔部の位置と姿勢を自然人類学の基準に基づいて定位し、更に頭顔部表面に同軸投光した構造光の反射パタン画像に基づいて幾何光学的に再定位することにより、対象領域を繰り返し撮像する。また、頭顔部と能動光学装置を含んで3次元空間を構成し、頭顔部の位置と姿勢を自然人類学の基準に基づいて定位し、更に頭顔部表面に同軸投光した構造光の反射パタン画像に基づいて幾何光学的に再定位することにより、対象領域を繰り返し撮像し、撮像した画像から毛髪を自動計数する。
(もっと読む)
三次元形状測定方法および装置
【課題】三次元形状測定方法および装置において、例えば、ハレーション等の被測定物の表面の反射特性による反射光のノイズ成分を低減し、被測定物の表面の測定不能域を低減することができるようにする。
【解決手段】三次元形状測定装置100は、被測定物1にパターン光12bを投影するプロジェクタ2と、パターン光12bが投影された被測定物1を撮像して、被測定物1の表面からの反射光画像を取得するCCDカメラ3と、反射光画像から被測定物1の三次元形状を算出する演算部4と、被測定物1とCCDカメラ3との間に配置された偏光フィルタ9と、プロジェクタ2と被測定物1との間に配置された偏光フィルタ7とを備え、偏光フィルタ7、9は、透過軸の方向を調整可能に設けられている。
(もっと読む)
三次元形状計測装置
【課題】3つの位相の異なるデータを取得して、高い空間分解機能をもち、迅速でぶれのない三次元測定装置を提供する。
【解決手段】測定対象物40に対して、同じ周期でそれぞれ位相が2π/3シフトした赤、緑、青の光成分パターンを投影する照射手段20と、測定対象物40からの反射光を撮像する撮像手段30と、撮像手段30により撮像された画像データの各座標における反射光を赤、緑、青の光成分パターンに分解し、赤、緑、青の光成分パターンの輝度データを演算して、各輝度の合計が一定値になるように補正パラメータを演算し、補正パラメータに基づき、撮像手段により撮像された赤、緑、青の光成分パターンの輝度データを補正して、測定対象物40の位相情報を演算して、三次元形状の情報を算出する演算手段50を有することを特徴とする三次元形状計測装置である。
(もっと読む)
表面特性を用いて対象物の特定および/または認証をするための方法、および、その方法に使用するセンサ
本発明の主題は、表面特性を用いて、対象物の特定および/または認証をするための方法である。本発明のさらなる主題は、表面を走査するためのセンサである。 (もっと読む)
歯の表面形状および色合いの撮像のための装置
【課題】第1の光源から光を受けたときに輪郭干渉縞投影パターンを有し、第2の光源から光を受けたときに実質的に一様な照明場を有する照明光線を形成する照明場発生器を有する口腔内撮像装置を提供する。
【解決手段】照明光線の経路内の偏光子14は、第1の偏光透過軸を有する。投影レンズ16は、偏光された照明光線を歯表面に向け、結像レンズ22は、歯表面からの光の少なくとも一部を検出経路に沿わせる。検出経路に沿って配置された偏光選択的要素は、第2の偏光透過軸を有する。少なくとも1つの検出器30は、偏光選択的要素を通じて供給される光から画像データを取得する。制御論理プロセッサ34は、第1の光源と第2の光源とに順次、電力を交互に供給し、輪郭干渉縞投影データおよびカラー画像データの両方を取得するためのプログラムされた命令に応答する。
(もっと読む)
動的基準フレームを用いた3次元表面検出方法及び装置
3次元対象物の表面形状を光センサで取得する。投影装置及びカメラを有するセンサを、単一回露光で3次元データを生成するよう構成し、センサを3次元対象物に対して移動させるか、又はその逆を行う。パターンを3次元対象物に投影し、投影パターンの一連のオーバーラップ画像をカメラで記録する。一連の3Dデータセットを記録画像から求め、続いて得た3Dデータセット間で位置合わせを行う。これにより、相対位置を追跡せずにセンサを対象物の周りで自由に移動させること又はその逆を行うことができ、3次元対象物の表面形状をオンザフライで求めることができる。 (もっと読む)
形状測定装置および形状測定方法
【課題】形状測定装置および形状測定方法を提供すること。
【解決手段】測定対象基板を支持するワークステージと、光源、格子イメージを生成するために光源から発生された光を透過及び遮光させる格子部および前記測定対象基板の測定対象物に前記格子イメージを結像させる投影レンズ部を含むパターン投影部と、前記測定対象基板の測定対象物で反射される格子イメージを撮像する撮像部と、ワークステージ、パターン投影部および撮像部を制御し、前記格子イメージの信頼性指数と測定対象物に対する格子イメージの位相を算出して、前記位相と前記信頼性指数を利用して測定対象物を検査する制御部と、を含む。したがって、測定精度を向上させる。
(もっと読む)
マルチイメージフェーズシフト解析を用いた検査システム及び方法
【課題】エッジ破断部を検査するための、新規の改善された検査システム及び方法を提供すること。
【解決手段】検査システム(10)が、光源(20)と、回折格子(23)と、位相シフトユニットと、イメージャ(30)と、プロセッサ(11)とを備える。光源(20)は、光を発生するように構成される。回折格子(23)は、発生した光の経路内にあり、光が通過した後に回折格子像を生成するように構成される。位相シフトユニットは、回折格子像の複数の位相シフトパターンを形成し、それを物体表面(16)上に反射して、複数の投影位相シフトパターンを形成するように構成される。イメージャ(30)は、投影位相シフトパターンの像データを取得するように構成される。プロセッサ(11)は、像データから物体表面を再現するように構成される。検査方法についても開示する。
(もっと読む)
撮像装置及びその制御方法
【課題】撮像対象との距離を表す距離画像を生成する際に、撮像対象の光反射やその光沢などの外乱、測定原理等に起因する距離の誤差の低減を実現する。
【解決手段】撮像対象との距離を計測するための画像を撮像する第1の撮像手段110と、第1の撮像手段110で撮像された画像に基づくデータを用いて撮像対象までの距離を算出する距離算出手段130と、偏光成分を計測するための画像を撮像する第2の撮像手段122と、第2の撮像手段122で撮像された画像に基づくデータを用いて偏光状態の解析処理を行う偏光解析手段140と、距離算出手段130で算出された距離に係る距離情報103及び偏光解析手段140で解析処理された偏光状態に係る偏光解析情報105に基づいて、撮像対象の距離画像106を生成する距離画像生成手段150を備える。
(もっと読む)
口腔内スキャナーと、それを用いた口腔内画像測定装置
【課題】本発明は、口腔内スキャナーと、それを用いた口腔内画像測定装置に関するもので、小型化を図ることを目的とするものである。
【解決手段】そしてこの目的を達成するために本発明は、本体ケース内に設けられた発光素子1と、この発光素子1からの光を歯11に向けて出射させるプリズム9と、このプリズム9を介して歯11から戻った反射光を受光する受光素子15とを備え、前記プリズム9の歯11側に偏光板10を配置するとともに、前記プリズム9は、後方に入射面17および後反射面18、前方に前反射面19、下方に出射面20、上反射面を有し、前記プリズム9を構成する前記3反射面のうち少なくとも1つは選択反射面21および全反射面22を有する構成とした。
(もっと読む)
101 - 120 / 370
[ Back to top ]