
Fターム[2F065HH07]の内容
光学的手段による測長装置 (194,290) | 入射光 (9,091) | 強度分布 (4,196) | コード化パターン光 (370)
Fターム[2F065HH07]に分類される特許
81 - 100 / 370
投影照明の画像センサの回転シャッタとの同期

【課題】CMOSセンサーによる撮像時に、投影照明と回転シャッタとの同期を取る。
【解決手段】画像形成装置は照明組立体を有し、照明組立体は、複数の放射源と投影光学系を有し、放射源から視覚野の異なるそれぞれの領域の上へ放射を投影するように構成される。画像形成組立体は、画像センサ上に視覚野の光学的画像を形成するように構成された、画像センサと対物光学系を有し、画像センサは、多重のグループ内に配置されたセンサ要素の1配列を有し、画像センサは、視覚野の電子画像を形成するため、回転シャッタによりトリガーされて、連続するそれぞれの露出期間において、視覚野の異なるそれぞれの区域からの放射を獲得する。制御装置は、照明組立体が視覚野の異なるそれぞれの区域を前記回転シャッタと同期して照明するために、放射源をパルスモードで順次活性化するように接続される。
(もっと読む)
デプスカメラの互換性
奥行き画像コンシューマーと複数の異なる奥行き画像プロデューサーとの間の互換性が、奥行き画像コンシューマーとの互換性がないサポートされていないデプスカメラパラメーターを有する固有の奥行き画像を受信し、当該固有の奥行き画像を、奥行き画像コンシューマーと互換性のあるサポートされた仮想デプスカメラパラメーターを有する仮想的な奥行き画像へと変換することによって提供される。この仮想的な奥行き画像は奥行き画像コンシューマーへ出力される。  (もっと読む)
(もっと読む)
基板検査装置
検査精密度を向上させることのできる基板検査装置を提供する。基板検査装置は少なくとも一つの照明モジュール、結像レンズ、第1ビームスプリッタ、第1カメラ及び第2カメラを含む。照明モジュールは検査基板に光を提供し、結像レンズは検査基板から反射された光を透過させる。第1ビームスプリッタは結像レンズを透過した光のうち一部を透過させ残りを反射させる。第1カメラは第1ビームスプリッタを透過した光の印加を受けて撮像し、第2カメラは第1ビームスプリッタから反射された光の印加を受けて撮像する。このように、一つの結像レンズを用いて検査基板を検査することによって、従来の結像レンズ間の光軸または倍率偏差に起因した検査精密度の低下を防止することができる。 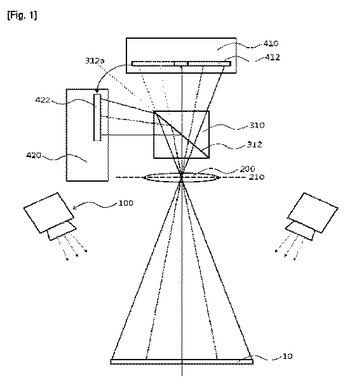 (もっと読む)
(もっと読む)
3次元計測装置及びその制御方法

【課題】コード化パターンの投影を用いた3次元位置計測を高速に行なえるようにする。
【解決手段】計測対象物体の位置姿勢を計測する3次元計測装置は、計測対象物体に投影するパターンを生成し、生成された複数種類のパターンを投影部により計測対象物体に投影して撮像部により撮影するとともに、投影したパターンと計測対象物体の形状モデルと計測対象物体の概略位置姿勢を示す情報とに基づいて、撮像により取得される撮像画像上のパターンの座標値を算出する。そして、算出された座標値を利用して、撮像画像上の撮影されたパターンと前記投影部により投影されたパターンとを対応づけし、計測対象物体に投影されたパターンと撮像部との距離を求める。また、求めた距離と当該計測対象物体の形状モデルとを用いて計測対象物体の位置姿勢を推定し、概略位置姿勢の情報を更新する。
(もっと読む)
照明装置及び該照明装置を用いた計測システム
【課題】コントラストの高いパターン投影を実現する。
【解決手段】計測装置と照明装置、撮像装置の位置関係を較正するキャリブレーションを行う(S101)。二次元パターン光の投影面内での輝度の不均一補正処理を行い(S102)、低下したピーク輝度を補償するための光源光量の調節を行う(S103)。計測対象物に二次元パターン光を投影し(S104)、反射された二次元パターン光を撮像装置で撮像する(S105)。撮像装置側の影響で生ずる二次元パターン光の輝度変化及びパターンエッジの位置ずれを、取得した二次元パターン画像に対し不均一補正処理を適用して補正する(S106)。補正処理した二次元パターン画像を基に、計測装置は計測対象物のそれぞれの測定点における奥行き方向の距離情報を取得して距離計測処理を行う(S107)。
(もっと読む)
距離計測装置、距離計測方法、及びプログラム
【課題】テクスチャ情報の少ない被写体を高密度に距離計測することを目的とする。
【解決手段】光源から照射される光が投影光学系のレンズを透過する透過率を空間的に符号化する符号化素子を含む投影部と、投影部により光が投影された距離計測対象を撮像する撮像部と、撮像部により撮像された撮像画像と、予め定められた距離ごとに撮像部により予め撮像された複数のキャリブレーション画像との類似度を示す相関値を算出する算出部と、算出部により算出された相関値が最大となるキャリブレーション画像に対応する距離を距離計測対象までの距離として決定する決定部と、を備える。
(もっと読む)
撮像装置、3Dモデリングデータ生成方法、および、プログラム
【課題】高精度な3Dモデリングデータを容易に生成する。
【解決手段】制御部210は、第1撮像部110と第2撮像部120で撮像する被写体について、当該被写体の明部を適正露出とする露出条件と、暗部を適正露出とする露出条件を設定する。制御部210は、設定した各露出で撮像するよう第1撮像部110と第2撮像部120を制御することで、露出の異なる画像ペアを得る。制御部210は、得られた画像ペアを構成する画像において、パターン投影部130が被写体に投影したパターンを特定する。制御部210は、特定されたパターンについて、同一露出の画像ペアを構成する画像間で、パターンの密度に基づく最適化をおこなうとともに、露出の異なる画像間で、パターンの画像状態に基づく最適化をおこなう。制御部210は、最適化されたパターンの対応点を用いて3Dモデリングデータを生成する。
(もっと読む)
3次元形状計測方法及び3次元形状計測装置
【課題】信頼性の高い3次元形状計測結果を得る。
【解決手段】3次元形状計測装置20は、対象物体を含む測定空間を分割する空間コードに対応した複数の投影パターンを、対象物体に順次投影して撮像した複数の撮像画像を用いて、各画素を輝度値に応じて2値化して空間コードに変換する空間コード算出手段23と、変換した空間コードを用いた三角測量により画素毎に3次元情報を算出して対象物体の3次元形状を求める三角測量手段26と、画素毎の3次元情報に基づいて、注目画素と隣接画素の高さを比較し、高さの差が所定範囲内の画素同士を連結して連結領域を設定し、連結領域の面積が所定値より小さい場合にノイズと判定するノイズ判定手段24と、ノイズと判定された連結領域の3次元情報を除去するノイズ除去手段25とを備える。
(もっと読む)
計測方法及び露光装置
【課題】 投影光学系の結像特性、特に露光光の角度特性を高精度に測定する。
【解決手段】 光源からの光を用いてマスクを照明する照明光学系と、マスクのパターンを基板に投影する投影光学系とを有する露光装置を用いて、基板を露光する露光光の角度分布を計測する。光源の波長をλ、投影光学系の射出側開口数をNA、投影光学系の投影倍率をβとして、投影光学系の物体面にλ×10/(NA×β)以上の線幅の特定パターンを配置し、特定パターンを照明し、投影光学系の光軸方向における複数の位置における特定パターンの像をセンサを用いて計測し、該計測結果を用いて露光光の角度特性を算出する。
(もっと読む)
検出器、インプリント装置及び物品の製造方法
【課題】マークの位置を容易に計測できる検出器を提供する。
【解決手段】マーク6、7bの位置を検出する検出器5は、撮像素子と、前記マーク6、7bを前記撮像素子の撮像面に投影する光学系と、前記光学系を構成する光学素子の中で前記マーク6、7bが配置されるべき配置面に対して最も近くに配置された光学素子と前記撮像面との間であって前記配置面と光学的に共役な位置に配置されたパターンと、前記マーク6、7b及び前記パターンによって前記撮像面に形成されるモアレ模様に基づいて前記パターンの位置又は前記パターンの位置に対して既知の位置を基準とする前記マーク6、7bの位置を演算する処理部と、を備える。
(もっと読む)
光学式位置検出装置及び投射型表示装置
【課題】複数の検出対象物の位置をそれぞれ検出すること。
【解決手段】光学式位置検出装置は、相互に異なる第1の波長域及び第2の波長域に光強度を備えた位置検出光L2を放出する位置検出用光源部140と、第1の波長域の反射率が第2の波長域より高い反射特性を備えた第1検出対象物310と、第2の波長域の反射率が第1の波長域より高い反射特性を備えた第2検出対象物320と、第1の波長域の検出感度が前記第2の波長域より高い感度特性を備え第1の光検出信号を出力する第1光検出部410と、第2の波長域の検出感度が前記第1の波長域より高い感度特性を備え第2の光検出信号を出力する第2光検出部420と、位置検出用光源140を制御して光強度分布を形成するとともに、第1の光検出信号に基づいて第1検出対象物310の位置を検出し、第2の光検出信号に基づいて第2検出対象物320の位置を検出する位置検出部400と、を具備する。
(もっと読む)
表面性状測定方法および表面性状測定装置
【課題】非平板物体の凹部あるいは中空部の表面粗さ、特に凹部底面あるいは中空部底面の表面粗さを、非接触で、定量的に、精度良く、且つ簡便に測定する。
【解決手段】パターン形成装置11によりパターンを照射し、ハーフミラー13で反射させて、測定対象物2である非平板物体の凹部底面あるいは中空部底面に垂直に投射し、反射したパターンを、ハーフミラー13を透過させて撮影部3(デジタルカメラ等)で撮影する。そして、得られた映像信号をコンピューター3でデータ処理することにより、測定対象面21の表面性状を測定・評価する。
(もっと読む)
表面性状測定方法および表面性状測定装置
【課題】非平板物体の凹部あるいは中空部の表面粗さ、特に凹部内周面あるいは中空部内周面の表面粗さを、非接触で、定量的に、精度良く、且つ簡便に測定する。
【解決手段】パターン形成装置11によりパターンを照射し、ハーフミラー13で反射させ、更にミラーで反射させて測定対象物2である非平板物体の凹部内周面あるいは中空部内周面に垂直に投射し、反射したパターンを、ミラー14で反射させ、ハーフミラー13を透過させて撮影部3(デジタルカメラ等)で撮影する。そして、得られた映像信号をコンピューター3でデータ処理することにより、測定対象面22の表面性状を測定・評価する。
(もっと読む)
三次元形状測定装置
【課題】 連続移動する測定対象物の三次元形状を、位相シフト法により高速に測定すると共に、垂直解像度や深度を柔軟に設定できる構成とする。
【解決手段】
被測定対象物に対して斜め上方から、投影方向に沿って光の強度が正弦波状に変化する格子縞を投影する格子縞投影器1と、鉛直上方に位置しエリアセンサ6を備えたカメラ2と、被測定対象物を一定方向へ移動させるステージ3とを備え、格子縞は位相が互いにπ/2ずつシフトした4つの帯状領域に分かれており、エリアセンサ6上の各帯状領域につき一本の水平ライン、計4本から画像を読出し、位相シフト法の原理を用いて位相を算出して高さに変換し、被測定対象物の三次元形状を測定する。
(もっと読む)
歩行データ計測装置
【課題】歩行データを精度良く計測する。
【解決手段】計測装置10は、接地センサ14、24、走査型光学距離センサ(LRF)12、受光器22a、22b、演算ユニット18を備える。LRF12は、測距用照射光の強さを変化させることによって照射光に情報を含ませることができる。各受光器は、受光した照射光に含まれている情報を読み取ることができる。計測装置10は、接地センサが接地を検知している間、LRFが照射方向を示す照射方向情報を含ませた照射光を照射して各照射方向における距離を計測する。次いで、各受光器が、受光した照射光に含まれている照射方向情報、及び、自己を識別するための受光器識別子を演算ユニットへ送信する。演算ユニットは、受光器識別子と照射方向情報と各照射方向の計測距離から一方の足に対する各受光器の方向と距離を算出し、各受光器の方向と距離から2つの足の相対位置を算出する。
(もっと読む)
物体表面の形状測定装置、その形状測定方法及び部品キット
【課題】干渉測定および非干渉測定の両方を通して物体表面の高さマップを定める装置を提供する。
【解決手段】本発明は、表面の高さマップを定める装置であって、表面が測定される物体の位置決め手段と、光源と、受けた光を電気信号に変換する光検出器と、光源からの光を表面に向け、表面からの光を光検出器に向ける第1の光学系と、第1の光学系と表面との間に配置されるビームスプリッタと、参照ミラーと、ビームスプリッタとミラーとの間に配置され、ビームスプリッタからの光をミラーに向けると共に、ミラーからの光をビームスプリッタに向ける第2の光学系と、走査手段と、光検出器からの信号を高さマップに変換するように構成された処理手段とを備え、ビームスプリッタが偏光ビームスプリッタであり、光源と第1の光学系との間に、制御可能な偏光コントローラが配置される、装置に関する。
(もっと読む)
光学系パラメータ校正装置、光学系パラメータ校正方法、プログラム、及び記録媒体
【課題】プロジェクタ・カメラシステムのパラメータを容易に校正し、また、内部・外部パラメータを推定する。
【解決手段】画像入力部12は、スクリーン上の幾何情報が既知であるターゲット点を、カメラ1から入力するとともに、プロジェクタ3からスクリーン上に照射したサンプル点をカメラ1から入力する。サンプル点補正部14は、サンプル点の位置がスクリーン上のターゲット点の位置と一致するように、プロジェクタ3に設定するサンプル点の2次元座標を補正する。参照点抽出部15は、ターゲット点及び補正されたサンプル点に対する画像から、カメラ1及びプロジェクタ3のパラメータを推定するための参照点を抽出する。パラメータ推定部16は、これら参照点の2次元座標から、カメラ1及びプロジェクタ3のパラメータを推定する。
(もっと読む)
三次元画像を撮影するための方法
本発明は、重複する撮影領域を有する2つのカメラ(1a、1b)を用いて対象物の三次元画像を撮影するための方法に関し、較正プロセスの過程において、前記各カメラ(1a、1b)に対してそれぞれ、相互に属するエピポーラ線群を求める。予め設定されたランダム画像(40)を、撮影されるべき対象物(30)上に投影する。カメラの各ピクセルに対して、第1の周辺区域(13a)を特定し、属する第1のエピポーラ線(9a)を特定し、当該第1のエピポーラ線(9a)に対して、第2のカメラ(1b)の対応する第2のエピポーラ線(9b)を特定する。前記第2のエピポーラ線(9b)上に位置する、前記第2のカメラ(1b)の画像の全ピクセル(8b)に対して、第1の周辺区域に対して合同の第2の周辺区域(13b)を特定する。第1のおよび第2の周辺区域(13a、13b)の強度値を相互に比較し、一致度を形成する。一致度が最大である、第2のエピポーラ線(9b)上の画像位置(14)を特定する。事前に特定されている変換によって空間位置(17)を特定する。三次元画像は、このようにして求められた空間位置(17)を含む。  (もっと読む)
(もっと読む)
位置検出機能付き投射型表示装置
【課題】多数の発光素子や受光素子を用いなくても、対象物体のXYZ座標を検出することのできる位置検出機能付き投射型表示装置を提供すること。
【解決手段】画像投射装置200を備えた投射型表示装置に対して位置検出機能を付加して位置検出機能付き投射型表示装置100を構成する。画像投射装置200には、検出領域に向けて赤外光からなる位置検出光を出射する複数の発光素子12を設け、かかる位置検出光の強度分布を形成する。データ処理部50は、検出領域10R内の対象物体Obで反射した光を光検出器30が検出した結果に基づいて対象物体ObのXYZ座標を検出するとともに、Z座標に基づいて、画像投射装置200において各種モードを実行させる。
(もっと読む)
高速三次元計測装置及び高速三次元計測方法
【課題】被測定物の見かけの形状をできるだけ歪ませることなく形状計測できると共に、長い物や連続的に移動する物であっても形状計測できる高速三次元計測装置を提供する。
【解決手段】高速三次元計測装置は、被測定物の上に、一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射するパターン光源と、前記被測定物からの前記縞状パターン光の反射光を前記一つの方向に沿ったラインについて一組の光信号として取り込むラインカメラと、取り込んだ一組の前記光信号について、前記縞状パターン光との関係に基づいて前記被測定物の高さを算出する計測部と、を備える。
(もっと読む)
81 - 100 / 370
[ Back to top ]