
Fターム[2F065NN16]の内容
光学的手段による測長装置 (194,290) | 制御 (2,523) | 受光量モニター (208) | 専用受光器 (41)
Fターム[2F065NN16]に分類される特許
1 - 20 / 41
三次元形状測定装置
【課題】多乱光の影響による三次元形状の測定の誤差を抑制する。
【解決手段】三次元形状測定装置は、投影部と、調整部と、検出部と、制御部とを備える。投影部は、測定対象物に対してパターン光を照射する。調整部は、パターン光の照射強度を調整する。検出部は、パターン光の照射された前記測定対象物の表面の明るさを検出する。制御部は、パターン光を照射しない非照射状態で検出される測定対象物の表面の明るさに基づいて調整部による照射強度の調整を制御する。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器

【課題】対象物体以外の物体で反射した検出光の影響を受けずに対象物体の位置を検出することができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10においては、複数の検出用光源12を順次点灯させると、第1受光部31は、対象物体Obで反射した検出光L3を受光する。その際、第1受光部31には、対象物体Ob以外の物体Sbで反射した検出光L4が入射する場合があるが、光学式位置検出装置10には、検出対象空間10Rに入射しない補償光L5を出射する補償用光源部81と、検出光L2、L3、L4を受光せずに補償光L5を受光する第2受光部32とが設けられており、位置検出部50は、第1受光部31での受光強度と第2受光部32での受光強度との差に基づいて対象物体Obの位置を検出する。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガルバノミラー35で反射させてガラス管Gに照射し、ガラス管Gの外周面で反射する反射光及び内周面で反射する反射光をラインセンサ39で受光し、反射光の受光位置からガラス管Gの厚さを検出する。サーボ用レーザ光源40からのサーボ用レーザ光をガルバノミラー35で反射させて、ガラス管Gにおける測定用レーザ光の照射位置又はその近傍位置にZ軸方向から照射する。フォトディテクタ48でガラス管Gからのサーボ用レーザ光の反射光を受光し、Y軸方向エラー信号生成回路119、Y軸方向サーボ回路120及びY軸方向ドライブ回路121が、モータ36を駆動制御することにより、測定用レーザ光の光軸がガラス管Gの中心軸と交差するようにガルバノミラー35のX軸線周りの回転をサーボ制御する。
(もっと読む)
欠陥検査装置および欠陥検査方法
【課題】
従来技術によれば、試料に熱ダメージを与えることなく、短時間で高精度に欠陥検出・寸法算出することが困難であった。
【解決手段】
試料の表面におけるある一方向について照明強度分布が実質的に均一な照明光を、前記試料の表面に照射し、前記試料の表面からの散乱光のうち互いに異なる複数の方向に出射する複数の散乱光成分を検出して対応する複数の散乱光検出信号を得、前記複数の散乱光検出信号のうち少なくとも一つを処理して欠陥の存在を判定し、前記処理により欠陥と判定された箇所各々について対応する複数の散乱光検出信号のうち少なくとも一つを処理して欠陥の寸法を判定し、前記欠陥と判定された箇所各々について前記試料表面上における位置及び欠陥寸法を表示する欠陥検査方法を提案する。
(もっと読む)
光学式表面粗さ測定装置
【課題】 微小な凹凸に加えて周期と変動量の大きな凹凸が存在する測定対象物の表面粗さも検出できるようにする。
【解決手段】 測定対象物OBの表面上を接触しながら移動するスライダ44に対物レンズ305を配置するとともに、スライダ44をプローブ40によって光学ヘッド本体30に弾性的に支持する。レーザ光源301からのレーザ光を対物レンズ305により集光させて測定対象物OBの表面に照射し、測定対象物OBの表面からの反射光をフォトディテクタ308で受光して、フォーカスエラー信号を生成する。フォーカスエラー信号を用いてレーザ光の焦点位置から測定対象物OBの表面位置までの距離に応じて変化する距離を計算して、前記計算した距離に、スライダ44の光学ヘッド本体30に対する相対位置の変動量を加味して測定対象物OBの表面の基準面に対する凹凸の大きさを計算する。
(もっと読む)
欠陥検査装置および欠陥検査方法
【課題】
単一の統合条件においては複数の欠陥種を同時に検出することは困難であり、また、多次元の特徴量として扱って複数の欠陥を検出すると、信号処理にかかる計算コストが検出器の増加とともに増大するという問題が発生する。
【解決手段】
被検査対象物に照明光を照射する照明光学部と、前記照明光学部により照射され該被検査対象物から該被検査対象物の表面に対してそれぞれ異なる方位角方向および仰角方向に散乱する散乱光をそれぞれ検出する複数の検出器を備えた検出光学部と、前記複数の検出器により検出した該被検査対象物からの散乱光に基づく複数の信号のそれぞれについて、ゲイン調整および閾値判別に基づく欠陥判別を並列に行い、前記ゲイン調整および欠陥判別された結果に基づき欠陥を抽出する信号処理部と、を有する欠陥検査装置である。
(もっと読む)
近接照度センサおよびその製造方法
【課題】人間の視感度特性に合わせた視感度特性と小型化とを両立できる近接照度センサを提供する。
【解決手段】基板4と、基板4に実装された発光素子10と、基板4における発光素子10と同一の面に実装された、表面に光学フィルタが実装された照度センサ受光素子6と、基板4における発光素子10と同一の面に実装された距離検知用受光素子8と、照度センサ受光素子6をモールドする第1の可視光樹脂14と、第1の可視光樹脂14の周囲を覆うように基板4に設けられた可視光および赤外線カット樹脂16と、第1の可視光樹脂14における上記基板と接する面と対向する面全体を覆うように実装された赤外線カットフィルタ18とを備えていることを特徴とする近接照度センサ1。
(もっと読む)
非接触物体検査
物体のエリアのトポグラフィを、物体上に投影されたパターンの位相の解析を介して検査する非接触方法である。その方法は、第1のパースペクティブから獲得された、光学的パターンが投影される物体の第1の画像を取得するステップと、第2のパースペクティブから獲得された、光学的パターンが投影される物体の第2の画像を取得するステップであって、第2の画像内の物体上に当たるときの光学的パターンは、第1の画像内の光学的パターンとは異なる、ステップとを含む。その方法は、第1の画像内に映し出された光学的パターンの少なくとも1つの領域の位相に関する位相データに基づいて、物体の少なくとも1つの領域のトポグラフィを記述するデータを決定するステップをさらに含む。第2の画像内に映し出された物体の対応する領域から獲得した位相データは、第1の画像から獲得した位相データまたはトポグラフィデータのあらゆる曖昧性を解決するために使用される。
 (もっと読む)
(もっと読む)
形状検査装置,形状検査方法
【課題】ディスク部材について,表裏各面と端面を形成するチャンファ部との境界部分において突起した形状欠陥を検出することができること。
【解決手段】1つの平面内の複数の位置各々に配置された複数のLED12からディスク基板1の測定部位Pに対し,順次異なる照射角度で光を照射し,その照射ごとに,計算機30により,測定部位Pからの反射光の像のカメラ20R,20Lで撮像し,さらに,計算機30により,各LED12に対応した撮像画像と光の照射角度φとに基づいて,測定部位Pの表面角度の分布を算出し,表面角度の変化が許容範囲内か否かの判別により表面形状の良否を判別し,表面形状の画像を,形状不良部分を明示しつつ画像表示装置に表示させる。
(もっと読む)
測定システムおよび干渉計
【課題】産業機械と干渉計とが衝突してしまうことを防止できる測定システムを提供すること。
【解決手段】移動体21と干渉計3とが接近しすぎるなど、移動体21に取り付けられた反射体41に対する測定においてなんらかの異常があった場合、干渉計3の判定手段7が受光信号に基づいて、反射体41に対する測定において異常があると判定し、干渉計3の停止命令出力手段52が産業機械2に停止命令を出力する。そして、停止命令が入力された産業機械2の停止手段231が移動機構22の駆動を停止させ、移動体21の移動を停止させる。従って、移動体21と干渉計3とが接近しすぎるなど、移動体21の測定においてなんらかの異常があった場合、産業機械2の停止手段231が移動機構22の駆動を停止させることとなるので、産業機械2と干渉計3とが衝突してしまうことを防止することができる。
(もっと読む)
追尾式レーザ干渉計
【課題】再帰反射体を見失ってしまっても測定を再開できる追尾式レーザ干渉計を提供すること。
【解決手段】第1判定部521により第1,第2受光手段のうち少なくとも一方の受光手段の受光量が所定の第1閾値以下と判定された場合、パターン射出制御部54が、光源からの光が所定のパターンに沿って射出されるように変更機構121を制御する。そして、パターン射出制御部54により変更機構121が制御され、光源からの光が所定のパターンに沿って射出されている間に、第2判定部522により各受光手段の受光量が共に所定の第2閾値以上と判定された場合、追尾制御部51が変更機構121に再帰反射体11を追尾させる。従って、干渉計1は、再帰反射体11を見失った場合、所定のパターンに沿って光を射出して再帰反射体11を探索し、再帰反射体11を検出した場合には再び再帰反射体11を追尾でき、測定を再開できる。
(もっと読む)
印刷はんだ検査装置
【課題】プリント板の各点から得られる正反射光及び散乱反射光の2次元の光量分布を基に、はんだ箇所の高さを算出するときの基準位置を容易に求める技術を提供する。
【解決手段】基板1に垂直に近赤外光を照射し散乱反射光を受け、かつ斜めの角度で近赤外光を照射しその正反射光を受ける変位センサ2を備え、度数算出手段4は、散乱反射光量と正反射光量とを2次元とするヒストグラムを生成する。パラメータ決定手段5は、ヒストグラム上で散乱反射光量及び正反射光量が高い側においてほぼピークとなる度数分布を有する基準分布を選定し、基準分布の裾付近の2次元の範囲をパラメータとして決定する。測定検査部100は散乱反射光量及び正反射光量がパラメータの範囲内にある基板上の位置であって、はんだの高さを求めようとするはんだ箇所に近い位置を基準位置として、はんだの高さを求める。
(もっと読む)
形状測定装置
【課題】外乱光の影響を抑制し、物体の形状の測定精度を向上する。
【解決手段】物体にパタンを投影して、その像を撮像素子60により撮像することによって物体の形状を測定する形状測定装置の制御部61のFFT部102は、A/D変換部101を介してフォトセンサ59から取得した受光信号に基づいて、撮像素子60に入射する入射光の周波数成分を検出する。ピーク検出部111は、周波数成分の検出結果に基づいて、撮像素子60への入射光に含まれる外乱光の光量が所定の閾値以上かつ最大となる周波数fpを検出する。露光時間設定部113は、周波数fpに対応する周期Tpの倍数に撮像素子60の露光時間を設定する。本発明は、例えば、光学式の形状測定装置に適用できる。
(もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査位置を精度良く検出できるビーム照射装置を提供する。
【解決手段】ビーム走査用のミラー113に伴って回動する透明体200を配する。この透明体200にサーボ光を照射し、透明体200によって屈折されたサーボ光をPSD308にて受光する。PSD308の受光光量に応じた出力(APC用出力)を生成し、この出力が基準値(Vref)に一致するよう、半導体レーザ303の出力を制御する。このように制御することで、透明体200が回動しても、PSD308の受光光量は略一定となり、PSD出力に含まれる誤差を抑制できる。
(もっと読む)
3次元画像走査装置
【課題】レーザ光の照射位置における戻り光の正確な光量を測定することにより、正確な位置情報及び輝度情報に基づく正確な3次元画像を生成可能な3次元画像走査装置を提供すること。
【解決手段】レーザダイオード2と、第1光学系と、照射位置移動手段と、エンコーダ6aと、第2光学系と、CCDラインセンサ部13と、入射光量測定手段とを有し、検知手段から出力された検知信号により所定時間の間隔を有する複数のタイミング信号が生成され、タイミング信号によってCCDのリセットタイミングが制御し、一のタイミング信号後に確認用レーザ光の光量を入射光量測定手段により測定し、この確認用レーザ光の光量から測定用レーザ光の発光量が決定され、入射光量測定手段からの出力に基づくデータ(一定光量出力の確認用レーザの光量)を陰影情報に利用して3次元画像を生成する。
(もっと読む)
3次元形状測定装置および3次元形状測定方法
【課題】 レーザー光走査により広範に3次元形状測定を行うことができる3次元形状測定において、3次元形状に色彩や陰影を付しても精度が良好な3次元形状測定を行うこと。
【解決手段】 測定対象物表面の色彩や陰影を表す明度データM(n)は出射レーザー光強度データI(n)に基づいて計算される。この出射レーザー光の強度は、補正信号発生回路122およびレーザー光量補正回路124によりフォトセンサ112にて受光する反射光強度が基準反射光強度となるように制御される。反射光強度が一定とされるので、反射率の高低により3次元形状データの計算が不可能となる部分を少なくすることができ、精度の良い3次元形状測定を行うことができる。さらに、レーザー光の照射方向を走査用光学系106で走査する方式にて測定対象物の3次元形状測定および明度計算を行うので、広い領域で測定対象物OBの3次元形状測定および明度計算を行うことができる。
(もっと読む)
3次元形状測定器
【課題】レーザ光の照射位置における戻り光の正確な光量による計測が可能な形状測定装置を有する3次元形状測定器を提供すること。
【解決手段】レーザダイオード2と、第1光学系と、照射位置移動手段と、エンコーダ6aと、第2光学系と、CCDラインセンサ部13と、入射光量測定手段とを有し、検知手段から出力された検知信号により所定時間の間隔を有する複数のタイミング信号が生成され、タイミング信号によってCCDのリセットタイミングが制御されており、一のタイミング信号後に確認用レーザ光をレーザダイオード2から照射し、確認用レーザ光の光量を入射光量測定手段により測定し、入射光量測定手段により測定された確認用レーザ光の光量から測定用レーザ光の発光量が決定される。
(もっと読む)
表面検査装置
【課題】検査時における照明光の光量を安定させた表面検査装置を提供する。
【解決手段】本発明に係る表面検査装置1は、被検基板の表面に照明光を照射する照明部が、ランプハウス61からの光のうち所定の波長領域の光を透過させるバンドパスフィルターが設けられた波長選択機構70,75を有し、当該バンドパスフィルターを透過して得られた所定の波長領域の光を照明光として被検基板の表面に照射するように構成されており、紫外光を遮断するUVカットフィルター65がランプハウス61と波長選択機構70,75との間の光路上に挿抜可能に設けられ、非検査時にUVカットフィルター65が光路上に挿入されて、UVカットフィルター65を透過した光が波長選択機構70,75のバンドパスフィルターに照射されるようになっている。
(もっと読む)
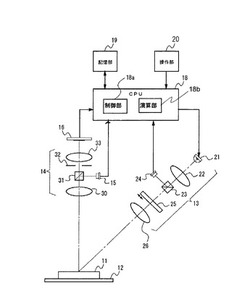
形状測定装置及び方法
【課題】撮影と略同時に外乱光を測定することにより、外乱光の影響を可及的に排除して被検物の3次元形状を精度良く測定することができる形状測定装置を提供すること。
【解決手段】被検物4に測定光(パターン光)を照射し、該被検物で反射した光を受光して該被検物の形状を測定する形状測定装置である。前記照射時に前記反射した光を含む前記被検物からの光を検出し、前記照射をしない非照射時に前記反射した光を含まない前記被検物からの光を検出する光検出部(第1光検出部6、第2光検出部10)と、前記光検出部が前記照射時に検出した前記反射した光を含む前記被検物からの光検出成分から前記非照射時に検出した前記反射した光を含まない前記被検物からの光検出成分を除去する演算処理部7と、を備える。
(もっと読む)
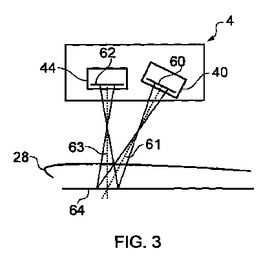
位相解析測定を行う装置および方法
位相解析を用いて対象物体を検査するための非接触法および装置。プロジェクタは、検査される対象物体の表面上に光学的パターンを投影する。次いで、光学的パターンが投影される表面の少なくとも第1の画像および第2の画像を得る。表面上の光学的パターンの位相は、対象物体に相対的にプロジェクタを移動することによって前記第1の画像と第2の画像との間で変化される。 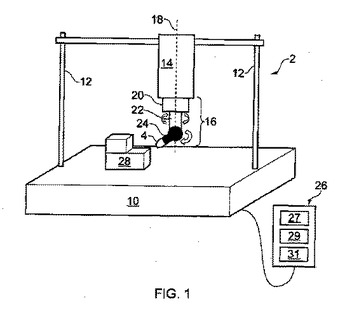 (もっと読む)
(もっと読む)
1 - 20 / 41
[ Back to top ]