
Fターム[2F065PP21]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 測定器の形態 (1,547)
Fターム[2F065PP21]の下位に属するFターム
Fターム[2F065PP21]に分類される特許
1 - 20 / 23
多方向近接センサー
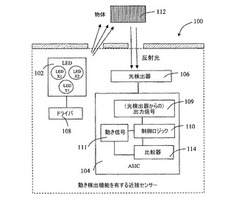
【課題】多方向の動き検出機能を有する近接センサーを提供する。
【解決手段】近接センサーは、ASIC(特定用途向け集積回路)チップ104、特定のシーケンスで光を放射するように構成された少なくとも3つの光源102、及び、光を受光して出力信号を生成するように構成された光検出器106を備える。多方向近接センサーは、少なくとも1つの側面を有する第1の近接センサーと100、第1の近接センサーの該少なくとも1つの側面にほぼ平行な面の上における物体の動きを検出するように構成された第2の近接センサーを備え、この場合、該第2の近接センサーは第1の近接センサー100に接続される。多方向動き検出近接センサーはPCBを有し、その場合、2以上の近接センサーを、PCBに配置して、多方向における動きを検出できるように一体化する。
(もっと読む)
画像処理方法、プログラム、および画像処理装置

【課題】計測時の手間を低減する。
【解決手段】CPU34cは、ブレードを撮像した動画像を構成する第1のブレード画像からテンプレート画像を抽出する。CPU34cは、第1のブレード画像とテンプレート画像とを比較し、第1のブレード画像の中から、テンプレート画像におけるブレードの姿勢と一致する姿勢のブレードを含む第2のブレード画像を抽出する。CPU34cは、予め算出された3次元形状を有する物体の画像をテンプレート画像に重畳した第1の画像を表示部に表示し、テンプレート画像におけるブレードの姿勢に一致するように、第1の画像における物体の姿勢を制御する。CPU34cは、この物体の画像を第2のブレード画像に重畳した第2の画像を表示部に表示する。CPU34cは、第2の画像における物体上の計測点の3次元座標を算出し、算出した3次元座標に基づいて、物体のサイズを算出する。
(もっと読む)
撮像装置
【課題】測定対象物を測定しつつ画像を取得するとともに画像を所望の視線方向から観察できる撮像装置を提供する。
【解決手段】撮像装置1は、画像を取得する撮像素子18と、測定対象物Wの被照射領域W1に光線を照射する発光部26および光線を検出する受光部28を有し、発光部から被照射領域までの距離を測定する測定部20と、発光部の位置を測定する位置測定部21と、発光部の向きを測定する姿勢測定部22と、発光部の位置および向き並びに発光部から被照射領域まで距離に基づいて被照射領域の位置および向きを算出する領域状態算出部55と、画像から抽出画像を作成する画像切出し部54と、抽出画像を領域状態算出部により算出された位置および向きに対応付けて記憶する記憶部56と、仮想空間に位置および向きに基づいて配置された抽出画像を視線方向に基づいて変換した視線変換全体画像を作成し表示部に表示させる画像処理部57と、を備える。
(もっと読む)
撮像装置、物体検出方法及び姿勢パラメータの算出方法
【課題】特定のランドマークを設置しないでも、精度良く撮像装置の姿勢パラメータを取得可能な姿勢キャリブレーションを実現する。
【解決手段】撮像部により撮像された画像に含まれる物体を検出し、検出された少なくとも2つの物体について、それぞれ撮像された画像における正立状態からの回転角度を算出し、算出された前記少なくとも2つの物体の回転角度から撮像装置の設置角度に関する姿勢パラメータを算出する。
(もっと読む)
内視鏡装置、計測方法、およびプログラム
【課題】同一の被写体に関する複数の被写体像を撮像して生成された画像データを用いて計測を行う際に、第1の被写体像に設定された計測点に対応する、第2の被写体像に設定された対応点の視認性を保つ。
【解決手段】CPU18は、画像データに基づく第1の被写体像に計測点を設定し、計測点の位置に基づいて、画像データに基づく第2の被写体像に対応点を設定する。また、CPU18は、対応点の位置に基づいて第2の被写体像に情報表示領域を設定する。モニタ4は、第1の被写体像、第2の被写体像、計測点、対応点、および情報表示領域を表示する。CPU18は、計測点の位置および対応点の位置に基づいて、画像データを用いて被写体を計測する。
(もっと読む)
内視鏡装置およびプログラム
【課題】他の装置で被写体の計測を行うことができる動画像を生成する際の処理負荷を、より低減させることができる。
【解決手段】撮像素子7と画像処理部9とを備える撮像部は、被写体を撮像して動画像データを生成する。データ付加部15は、撮像部が生成した動画像データを構成する画像データのうち一部の画像データにのみ、計測に用いるデータを付加する。ネットワーク送受信部16は、計測に用いるデータが付加された画像データを含む動画像データを送信する。
(もっと読む)
光学式測定機
【課題】鏡筒を本体に対して容易に取り付けることができるとともに、本体、及び鏡筒の破損を防止することができる光学式測定機の提供。
【解決手段】画像測定機1は、鏡筒2と、鏡筒2が取り付けられる円筒状の取付部32を備える本体3と、鏡筒2の周方向に沿ってリング状に配設され、被測定物を照明するリング照明装置4と、取付部32に取り付けられ、鏡筒2の本体3への取り付けを中継する中継部材5を備える。中継部材5は、鏡筒2が取り付けられる中継取付部522と、鏡筒2の外周を覆うように鏡筒2の軸方向に沿って延出し、鏡筒2を軸方向に沿ってガイドするガイド部523とを備える。
(もっと読む)
光構造観察装置及びその構造情報処理方法、光構造観察装置を備えた内視鏡システム
【課題】腺管構造の3次元的な構造を解析し、該腺管構造を有する計測対象の内部状態を所望の色調を反映させたカラー画像により容易に診断する。
【解決手段】OCTプロセッサの処理部22は、光構造情報検出部220、腺腔抽出手段及び色調切り替え手段としての腺腔抽出部221、閾値格納部222、抽出領域設定手段としての抽出領域設定部223、領域情報演算手段としての領域情報演算部224、平行断層画像生成手段としての平行断層画像生成部225、カラーマップ格納部226、色調編集手段としての色調編集部227、表示制御部228及びI/F部229を備えて構成される。
(もっと読む)
光学レンズの縁を計測するための方法および装置
【課題】レンズの縁の迅速かつ正確な計測が保証される方法及び装置を提供する。
【解決手段】光学レンズ1の縁1.1上の1つの点P1の座標Kを測定する方法であり、レンズ1は、保持装置3により保持され、光路2.1は、Z軸方向で計測する光学マイクロメータ2のY軸方向に延びており、保持装置3とマイクロメータ2との間の相対位置が既知であり、a)縁1.1が光路2.1内でにある状態でレンズ1が保持され、b)位置Aに位置決めされた縁1.1の点P1について第1のZ座標Zaが測定され、点P1のX座標Xaが光路2.1のY−Z平面のX座標に対応しており、c)レンズ1と光路2.1との間の相対位置の変化が保証され、d)光路2.1内における縁1.1の点P1について、第2のZ座標Zbが測定され、e)2つの相対位置における点P1についての2つの連立方程式に基づいて、欠けている座標およびが、従って点P1の位置が測定される。
(もっと読む)
深さ測定装置及び深さ測定方法
【課題】外部から視認することができないような穴の深さも測定可能な深さ測定装置及び深さ測定方法を提供することを目的とする。
【解決手段】深さ測定装置は、被検査物に形成された穴の一方の入口を照明する第1の光源(4)と、穴の一方の入口のテーパ状部を撮影した第1の画像を取得する第1の内視鏡(2)と、被検査物に形成された穴のテーパ状部を撮影した画像のテーパ状部に対応する領域における、その穴の半径方向の輝度勾配とテーパ状部の深さの関係を示す参照テーブルを記憶した記憶部(63)と、第1の画像から一方の入口のテーパ状部における穴の半径方向の輝度勾配である第1の輝度勾配を求め、第1の輝度勾配と参照テーブルを参照して一方の入口のテーパ状部の深さを求める深さ測定部(61)と、を有する。
(もっと読む)
膜厚測定方法
【課題】基材の材質や凹凸によらず、数μm程度の膜厚を測定することができる膜厚測定方法を提供すること。
【解決手段】基材上に形成された薄膜の膜厚を測定する膜厚測定方法であって、前記基材の表面のうち、第1の色の領域に形成された前記薄膜における輝度と、前記基材の表面のうち、前記第1の色とは異なる第2の色の領域に形成された前記薄膜の輝度との輝度差を算出し、前記算出した輝度差を、前記輝度差と前記薄膜の膜厚との関係を表す検量線にあてはめ、前記薄膜の膜厚を算出する膜厚測定方法。
(もっと読む)
光学システム、方法、およびプログラム
【課題】散乱媒体の厚さを算出することができる光学システムを提供すること。
【解決手段】光学システムであって、光を散乱する散乱媒体、および散乱媒体の下部にあり、光が入射された場合に偏光された光を入射側に戻す下部媒体を有する物体に向けて、光を照射する光照射部と、光照射部から照射されて散乱媒体によって散乱された光、および下部媒体からの光を受光する受光部と、受光部が受光した光の非偏光成分および偏光成分の少なくとも一方に基づいて、下部媒体までの散乱媒体の厚さを算出する厚さ算出部とを備える。
(もっと読む)
非接触3次元形状測定装置
【課題】構成簡単、かつ安価な非接触3次元形状測定装置を提供する。
【解決手段】X−Y平面上に測定対象6が載置されるテーブル1と、テーブルX−Y平面に垂直なZ軸方向からレーザ光2aを照射可能に配置されて測定対象6からの反射光を受光し測定対象6における光反射面角度を検出するオートコリメータ2を設ける。また、レーザ光2aをテーブルX−Y平面上に走査させる移動装置3と、移動装置3の位置信号及びオートコリメータ2からの光反射面角度信号が入力されて測定対象6の形状(段差長と段差角度)を計算する演算装置5を設ける。テーブル移動距離とオートコリメータ2で検出した光反射面角度により測定対象6の3次元形状を測定可能とした。
(もっと読む)
斜めのビュー角度をもつ検査システム
【課題】表面を斜めの検査角度において高い解像度で検査できるようにする方法及び装置を提供する。
【解決手段】表面に対して斜めのビュー角度に沿って表面のエリアを像形成するための装置は、ビュー角度に向けられた光学軸に沿ってエリアから光学放射を収集することによりエリアの初期傾斜像を形成するように適応された無限焦点光学リレー(192)を備えている。傾斜補正ユニット(194)が、初期像の傾斜を補正するように結合されて、実質的に無歪の中間像を形成する。中間像を像検出器に収束するために拡大モジュール(198)が結合される。
(もっと読む)
光プローブおよび光断層画像取得装置
【課題】計測光の出射方向を確実に把握することができる光プローブ、および、そのような光プローブを使って被検体の断層画像を取得する光断層画像取得装置を提供する。
【解決手段】透明チューブ101内を光ファイバー105によって導かれてくる計測光L1の進行方向をこの透明チューブ101の壁に向かう方向に変えてこの壁越しに被検体へと出射し、被検体から戻ってくる計測光L1を光ファイバー105へと戻す、プリズム102およびグリンレンズ103からなる光学素子と、この光学素子を透明チューブ101内で保持してこの光学素子とともに透明チューブ101の軸回りに回転自在な、計測光L1が出射される正面側に対する背面側にマークが付された光学素子保持筒103とを備えた。
(もっと読む)
同軸に扇形に広げられて構造化された光線束を屈折により発生させる方法、屈折式の光偏向要素を備えた光学式測定装置
【課題】1次光線束を広い幅に扇形展開することを可能にし、かつ比較的簡単に製作可能である光偏向要素を提供する。
【解決手段】この出願は、光偏向要素(450)の光軸(417)に対して同軸に扇形に広げられて空間的に構造化された光線束(422)を屈折により発生させるための光偏向要素を開示する。光偏向要素(450)が少なくとも部分的に光透過性材料から作られた基材(452)を有し、その基材が光入口面(460)および光出口面(470)を有する。1次光線束(411)が基材(452)に入射可能であるように、光入口面(460)が構成されている。光出口面(470)が光偏向要素(450)の光軸(417)に関して円筒対称の輪郭を有し、その輪郭が基材(452)において凹みを定める。1次光線束(411)の扇形展開が、光軸(417)に対して異なって傾斜させられた回転対称の境界面(471,472)における屈折によって行なわれる。この出願は、更に対象物内に形成されている空洞の3次元測定のために上記の光偏向要素(150,450)を有する光学式測定装置(100)を開示する。更に、この出願は、上記の光偏向要素(150)を用いて同軸に広げられて空間的に構造化された光線束(422)を発生させるための方法を開示する。
(もっと読む)
画像計測装置及び方法
【課題】 特徴点の選択による計測箇所の指定操作を効率的に行えるようにする。
【解決手段】 固体撮像素子21は、異なる視点から計測対象物30を撮像して視点毎の画像を取得する。画像処理装置23は、当該画像における計測対象物30の像から特徴点を抽出し、当該特徴点を抽出した画像とは異なる当該画像における計測対象物30の像から当該特徴点に対応する点の探索を行い、当該画像上における当該特徴点のうち当該特徴点に対応する点が当該探索によって得られたものに対して所定の印を表示させ、当該印が表示されている特徴点のうち1以上の特徴点が選択されたときの選択結果を取得し、当該選択結果に係る特徴点を計測対象として、当該視点毎の画像の撮像時における視差に基づいた三角測量による三次元計測を行う。
(もっと読む)
装置及び装置内でルーメンの3次元幾何形状及び寸法を決定する方法、オブジェクトの少なくとも一部分の3次元デジタル表示を得るための方法、及び、空間内の2つ以上の点の相対位置を得るための方法
固定の、既知の幾何形状及びサイズのルーメン内に配置された距離測定又はイメージングアセンブリの出力は、イアカナルのようなオブジェクトの3次元幾何形状及び寸法を決定するのに十分なデータを供給することができる。ルーメンの幾何形状及び寸法は、既知の幾何形状及び寸法のオブジェクトを測定又はイメージングすることによって決定又は測定される。 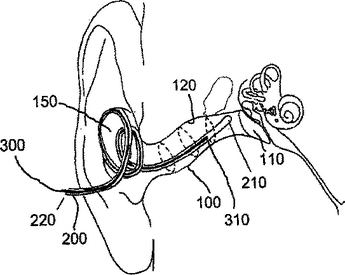 (もっと読む)
(もっと読む)
画像情報取得装置、画像情報取得方法およびプログラム
【課題】複数の要因により生ずる反射光画像の歪みを容易に補正することができる画像取得方法及び装置を提供する。
【解決手段】撮像対象に光を照射する発光手段と、撮像対象からの反射光を受光する受光手段と、受光手段で受光された反射光の強度分布から撮像対象の3次元形状を表す反射光画像を生成する画像生成手段を含む画像取得装置で、反射光画像を得、撮像対象の理想的な3次元形状を示す理想画像に対する反射光画像の歪みを補正するための変換行列を用いて、得られた反射光画像の各画素値を補正する。画像取得装置で得られた反射光画像の各画素値が各行列要素に対応する行列の逆行列と、理想画像の各画素値が各行列要素に対応する行列とを乗算することにより変換行列を生成し、反射光画像の各画素が各行列要素に対応する行列と変換行列とを乗算して、当該反射光画像の各画素値を補正する。
(もっと読む)
道路管理システム
【課題】
道路で発生している損傷の位置と内容を把握し地図上に表示するシステムにおいて、どの道路のどの位置で損傷が発生しているかわかりやすく表示し管理する。
【解決手段】
損傷が発生している位置の緯度経度情報に基づき、その緯度経度に一番近い道路のIDとキロポストを特定し、地図上の該当する道路の上に損傷が発生している旨を示すマークをキロポストの値とともに表示する。さらには、通知された損傷に関する情報に関して、通知された損傷の種類、損傷が発生している道路IDとキロポストの値に基づき、複数の通知を同一の損傷に関する情報と判定し1つのデータグループとして集約し地図上に表示する。また、損傷が発生している道路部位の交通量等に基づき損傷に対する重要度を付与し、重要度別にカテゴリ管理および表示を行う。
(もっと読む)
1 - 20 / 23
[ Back to top ]