
Fターム[2F069AA58]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 形状パラメーター (256) | その他の特定された形状パラメーター (16)
Fターム[2F069AA58]に分類される特許
1 - 16 / 16
長尺材の変位量測定装置
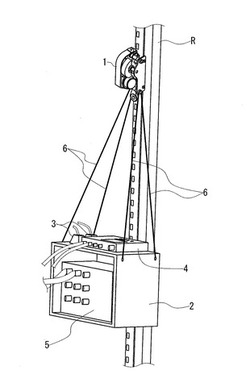
【課題】長尺材のうねり(変位量)を簡易かつ正確に測定することができる長尺材の変位量測定装置を提供する。
【解決手段】変位量測定装置は、定速走行部1と、架台2と、加速度計3と、記録計4とを備える。定速走行部1は、上下方向に伸びる長尺材(ガイドレールR)に沿って定速で走行する。架台2は、この定速走行部1と共に長尺材に沿って移動される。加速度計3は、架台2の平面方向の加速度を計測する加速度計であって、長尺材のうねりに応じて傾いた架台2の平面方向に生じる重力の加速度成分を計測する。記録計4は、加速度計3の計測結果を記録する。この計測結果と定速走行部1の走行速度とを利用することで、長尺体の変位量を演算により求めることができる。
(もっと読む)
コイルのテレスコープ量算出方法

【課題】金属板コイルのコイルエンドのタング形状部の測定によるテレスコープ量の誤認をなくする。
【解決手段】金属板コイルの端面に沿って距離計を走査させ、距離計とコイル端面間の距離を測定し、コイル内径両端の各最内巻金属板同士の測定距離の差を求め、この測定距離の差が一定のしきい値を超えるコイルは、金属板のコイルエンドのタング形状部の測定であると判定し、その測定値を除外してテレスコープ量を算出する。
(もっと読む)
金属帯の形状測定装置
【要 約】
【課 題】 極薄金属帯の形状を精度良く測定する形状測定装置を提供する
【解決手段】 金属帯を垂直方向に搬送する搬送手段と、金属帯に付加される張力を制御する張力制御手段と、金属帯の搬送速度を測定する速度測定手段と、非接触式距離計によって得られた測定データから金属帯の形状指標を演算する演算手段と、を有する金属帯の形状測定装置。
(もっと読む)
スロットロッドのスロット形状検出方法
【課題】 SZonSZスロットの反転角及び捻回ピッチを高精度に連続測定することができるスロットロッドのスロット形状検出方法を提供すること。
【解決手段】 スロットロッドの軸中心に対するスロットの回転角を一定周期でスキャンして検出した値を保持し、現在の回転角の値Aと現在より所定の時間T前にスキャンした回転角の値Bとを比較し、比較値が、値Aが値Bより継続して大きいときから値Aが値Bより継続して小さくなるまでの過程で値Bが値Aの値を超えたとき、または等しくなったときから1/2T前時間における回転角を、回転角の極大の反転部PUA1,PUA2……として検出し、比較値が逆の大小傾向を示すときには値Aが値Bの値を超えたとき、または等しくなったときから1/2T前における回転角を、回転角の極小PLA1,PLA2の反転部として検出することで、反転角及び捻回ピッチが高精度に連続測定できる。
(もっと読む)
焦点調整方法および装置
【課題】加工対象のうねり量を取得し、そのうねり量に基づいて光学系に設けられた焦点調整機構を制御して加工対象上に焦点を合わせる焦点調整方法において、よりスムーズに焦点調整機構を動作させる。
【解決手段】加工対象150上に焦点を合わせる焦点調整機構を有する複数の光学系162および加工対象150との距離を測定する距離測定手段184と加工対象150とを相対的に移動させ、その移動により距離測定手段184によって上記移動方向に沿って測定された測定データに基づいて、各光学系162の位置における加工対象150のうねり量を取得し、その取得したうねり量を上記移動方向について補間することによって各光学系162の焦点調整機構の制御データを生成し、その生成した制御データに基づいて焦点調整機構を制御する。
(もっと読む)
シェル形外輪の形状測定装置およびシェル形外輪の軌道面の真直度および平行度の測定方法
【課題】 ころを安定して転動させることができるシェル形外輪の軌道面の真直度および平行度を測定する形状測定装置を提供する。
【解決手段】 シェル形外輪の形状測定装置は、内径穴35を有する基準リング32と、内径穴35に圧入されたシェル形外輪22の内径面26および基準リング32の外径面または内径面の母線形状を測定するプローブ部33と、プローブ部33を軸方向に走査して移動させるプローブ移動手段とを有する。
(もっと読む)
円筒形状の測定方法及び測定装置
【課題】 移動手段の走査動作隙間を検出して変位検出器の値を補正し、前記走査動作の機械的正確さを追求することに負荷を必要としない高精度の測定方法を提供する。
【解決手段】 円筒体を中心軸回りに回転させ、前記中心軸直角断面上に配置され、円筒体の表面変位を計測する変位検出器を移動手段により前記中心軸方向に移動させ、前記変位検出器から得られた所定の位置での複数の検出信号を演算して円筒形状を測定する方法において、前記変位検出器は、第1の変位検出器と、前記第1の変位検出器の移動方向と反対に配置された第2の変位検出器とを有し、前記第2の変位検出器によって前記第1の変位検出器と同一の点を測定し、それぞれの測定値の差から前記移動手段の走査動作隙間を検出して前記第1の変位検出器の値を補正する。
(もっと読む)
電線の弛度測定方法および装置
【課題】大がかりな設備を要することなく容易に電線の弛度を測定できる電線の弛度測定方法および装置を提供すること。
【解決手段】第1、2の支持点i,jの第1および第2のカテナリー角α,βを測定する第1、第2の角度検出手段11,12と、各データを入力する入力手段13と、カテナリー曲線を表す式を積分して求めた計算式に、α,βの測定値および電線の長さLの推定値等の各データを代入し演算して長さLの計算値を求める第1の演算手段14と、計算値と推定値を比較して、両値が予め設定された精度で一致する否かを判定する判定手段14と、一致すれば、推定値を長さLの測定値と決定する決定手段14と、α,β、長さLの測定値に基づいて電線の弛度を演算する第2の演算手段14とを備え、判定手段14で一致しなければ一致するまで、計算値を推定値として計算式に代入して再度第1の演算手段14による演算と判定手段14による判定を繰り返す。
(もっと読む)
パイプラインの形状計測評価方法及びその装置
【課題】 長距離の計測においても精度の高い線形計測が可能なパイプラインの形状計測評価方法及びその装置を提供する。
【解決手段】 パイプラインの始点及び終点におけるピグ本体の姿勢を予め取得しておき、始点におけるピグ本体の姿勢に対して、ピグ本体の走行によって得られた姿勢変化角を順次累積して始点から終点までの順方向の姿勢データを求めるとともに、終点におけるピグ本体の姿勢に対して、ピグ本体の走行によって得られた姿勢変化角を順次累積して終点から始点までの逆方向の姿勢データを求め、順方向の姿勢データと逆方向の姿勢データとを用いて姿勢誤差を低減した姿勢データを再計算し、再計算後の姿勢データを用いてパイプラインの線形形状を求める。
(もっと読む)
パイプラインの形状計測評価方法及びその装置
【課題】 重力鉛直偏差による重力誤差を極力抑え、長距離の測定でも十分な精度を確保することの可能なパイプラインの形状計測評価方法及びその装置を提供する。
【解決手段】 ピグ本体を静止状態として静止状態における加速度計の加速度データを取得し、その加速度データから重力方向を求め、この重力方向と地上の現在地点における緯度とから、パイプラインの線形形状の計測を開始する際に必要なピグ本体の初期姿勢角を算出し、この初期姿勢角を、加速度データから求められる重力方向と地球を密度一様な楕円体と仮定した場合の重力方向との偏差に基づく補正角によって補正し、その補正後の初期姿勢角を用いてパイプラインの線形形状を求める。
(もっと読む)
路面状態測定システム及び路面状態測定装置
【課題】 舗装路面上の複数の測線について測定を行い、路面のテクスチャ評価の信頼性向上を図った路面状態測定システムを提供する。
【解決手段】 路面状態測定システム1は、路面までの距離を計測するレーザ変位計11と、レーザ変位計11を測線に沿って走査させるステッピングモータ120A、レール12A、12B、ボールネジ121A、取付部材13A、13Bと、測線に直交する方向にレーザ変位計11を移動させるステッピングモータ130、レール13、ボールネジ131及び取付部材11Aとを有している。それにより、レーザ変位計11を2次元的に平行移動させながら複数の測線について測定を行うことができる。また、複数の測線上の測定結果から算出される複数のMPD等のテクスチャ評価値の平均値を求めることで、テクスチャ評価の信頼性向上が図られる。
(もっと読む)
カンチレバーおよびその利用
【課題】 探針部分の振動振幅を微小にすることが可能である一方、カンチレバーの変位をある程度の大きさの振動振幅で検出することができ、かつ微細加工も可能な構成のカンチレバーおよびその利用を提供する。
【解決手段】 一方の端部11が支持台12に固定されており、もう一方の端部13が自由端である片持ち梁構造のレバー部10と、レバー部10の自由端13に力検出部15と、変位を検出するための変位検出部20と、を備えており、変位検出部20は、力検出部15と共振して振動する構造であり、力検出部15を振動させた場合、変位検出部20の振幅が力検出部15の振幅に比べて大きくなる共振周波数を有するカンチレバー100によれば、探針部分の振動振幅を微小にすることが可能である一方、カンチレバーの変位をある程度の大きさの振動振幅で検出することができる。
(もっと読む)
粗さ曲線の抽出方法および3次元表面粗さ形状の抽出方法
【課題】 断面曲線から粗さ曲線や3次元表示の粗さ形状を抽出する過程で、演算回数を少なくし、処理時間を短縮すると共にエンド効果を無くする。
【解決手段】 断面曲線のデータを間引き率Dでダウンサンプリングして断面曲線の間引きデータを得てから、間引きデータにカットオフ波長λ'c =λc/Dのガウシアンフィルタを適用してカットオフ波長λc以上の長波長成分を抽出し、断面曲線からカットオフ波長λc以上の長波長成分を減算して粗さ曲線を得る。
(もっと読む)
板材の平坦度測定方法および装置
【課題】 大きさにばらつきのあるウェハであっても、その回転中心のずれを測定し、このずれを高速に補正することにより、その平坦度を高速高精度で測定できるようにする。
【解決手段】 板材14を保持しながら回転させ、その回転角度と外形とを測定して、板材14の形状をもとに、この板材14自体の中心からその回転中心までの位置ずれを算出する。板材14を回転させたときに、この板材14の面の方向に走査する変位センサによって、板材14の回転中心を原点とする座標系についての複数の測定点において、変位センサから板材14の表面までの距離または距離の変化を測定する。前記算出した位置ずれにより、変位センサによる測定点の位置データを、板材14自体の中心を原点とする座標系に補正する。補正した位置データに基づいて、板材14の表面における厚さむらおよび反りを算出する。
(もっと読む)
路面データに基づく車軸挙動の算出方法
【課題】 路面データに基づいて車両の挙動を3次元的なうねりとして算出することができ、この車両の挙動を、路面の快適性や安全性を対象とした道路管理に役立てることのできる路面データに基づく車軸挙動の算出方法を提供する。
【解決手段】 車両が道路と接する4点の路面データを抽出し、この路面データから前車軸15と後車軸14がなす角度θを道路の長手方向へ連続的に求めることにより、車軸挙動を算出する。
(もっと読む)
測定対象物を測定する方法及び装置
【課題】 測定対象物とくに車両ホイールの測定を、より単純で費用効果的な方式で可能にする。
【解決手段】 本発明は、測定用の対象を測定する方法及び装置に関し、対象物座標系の画定のための少なくとも1つの基準構造を有し、対象に関して固定され、測定システムを用いて、これは測定座標系で測定するための対象の輪郭を記録するための少なくとも1つのセンサシステムを有している。本発明によれば、対象物座標系の位置を考慮に入れて、輪郭データと分析ユニットで実行された輪郭データの処理を決定する目的で、測定用の対象がセンサシステムの記録領域の測定位置に置かれていて、対象物座標系の位置が基準構造を用いて固定され、対象物座標系が測定座標系にリンクされ、センサシステムが測定用の対象に対して回転軸心の周りで回転される。本発明は更に、輪郭決定への利用に関する。
(もっと読む)
1 - 16 / 16
[ Back to top ]