
Fターム[2F069AA63]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 輪郭 (491) | 平面走査断面の (18)
Fターム[2F069AA63]に分類される特許
1 - 18 / 18
積層鉄心の積みズレ測定方法及び測定装置並びにコンピュータプログラム
【課題】積層鉄心の積みズレ測定方法及び測定装置において、積層鉄心の積層面における積みズレの測定を高精度且つ迅速に行う。
【解決方法】積層鉄心の積みズレ測定方法は、積層方向に沿って、積層鉄心(1)の積層面のプロファイルを取得する工程と、プロファイルのうち傾きの絶対値が所定の閾値を超える領域を鉄心間の谷間であると特定する工程と、プロファイルを特定された谷間を境界としてサブプロファイルに分割する工程と、サブプロファイル毎に波形の極大値を算出する工程と、算出された極大値のうち、最大のものと最小のものとの差異を積みズレとして算出する工程とを備える。
(もっと読む)
成型ドラム上のタイヤ構成部材の検査方法及び装置

【課題】 生タイヤの生産を停止させずに成型ドラム上のタイヤ構成部材を検査すること、及び検査した部材とそれを成型した生タイヤとを対応させることを可能にする。
【解決手段】 成型ドラム4にタイヤ構成部材5を貼り付けた後、成型者がジョイント合わせ等を行っている機械の待ち時間に、点観測式レーザ変位計1により、タイヤ構成部材5の表面迄の距離を測定する。その測定データと、予め測定しておいた成型ドラム4の表面迄の距離の測定データを基に、タイヤ構成部材5の断面形状データ及び貼り付け位置データを求める。求めたデータを、そのタイヤ構成部材5を用いて成型する生タイヤのバーコードとともにデータベース3に保存する。また、求めたデータとマスタデータとを比較処理部9で比較し、差が所定の閾値を越えた場合、比較結果出力部10でアラームを出力する。
(もっと読む)
断面形状の測定装置と測定方法
【課題】測定対象物に形成された円形孔の軸に垂直な断面形状を測定する技術を提供する。
【解決方法】断面形状測定装置10は、移動機構26と、回転機構38と、距離センサ12と、コンピュータ20によって測定手段を構成しており、下限位置A2において基準軸32の回りの断面形状(測定形状)を測定する。コンピュータ20は演算手段を構成しており、測定手段によって測定された楕円形状となる測定形状の長径と短径の長さ及び長径方向に基づいて、測定対象物16に形成された円形孔34の軸に垂直な断面形状を測定する。下限位置A2における測定形状のみをもちいて、円形孔34の軸に垂直な断面形状を測定することができる。
(もっと読む)
形状測定装置
【課題】被測定物の3次元形状を規定した測定点群から精度よく簡便に形状測定する形状測定装置を提供する。
【解決手段】被測定物の形状を規定した3次元の測定点群データ2が3次元測定装置8から出力されると、形状測定装置1の断面抽出部3が、測定点群データ2から所定の切断面に含まれる測定点を抽出した断面点群データ4を生成する。測長領域設定部5は断面点群データ4に測長領域を設定する。入出力装置7を介して、ユーザから測長領域の断面点群が指定されると、測長部6がその断面点群を用いて被測定物の外側寸法、内側寸法、2点間寸法、角度等を測定する。
(もっと読む)
多点プローブの零点誤差の変動検出方法
【課題】複数のセンサのドリフトが生じた後の零点誤差の補償を容易に行うことができる多点プローブの零点誤差の変動検出方法を提供する。
【解決手段】
多点プローブの零点誤差の変動検出方法は、センサユニット220をスピンドルにて回転されている状態の試料の測定面に相対するように配置して、試料が1回転する間において、試料が所定回転角度回転する毎に複数の変位センサA,B,Cから出力される試料の測定面における同心円に沿う形状値及び零点誤差を含む測定値をCPU310に読取りさせて記憶装置340に記憶させる。記憶装置340が記憶した、同一の試料に関する新しい測定値と古い測定値とに基づいて、零点誤差の変動量を算出する。
(もっと読む)
多点プローブの零点誤差関連値記録装置
【課題】多点プローブにおいて、複数のセンサのドリフトが生じた後の零点誤差の補償を容易に行うことができる多点プローブの零点誤差関連値記録装置を提供する。
【解決手段】
零点誤差関連値記録装置は試料を回転させるスピンドルと、複数の変位センサA,B,Cを含む真直形状測定用のセンサユニット220を試料の測定面に相対するように支持するセンサキャリッジ230を備える。試料が所定回転角度回転する毎に変位センサA,B,Cから、試料の測定面における同心円に沿う形状値f(rF,θ),f(r0,θ),f(rR,θ)及び零点誤差を含む測定値をCPU310が読取り、読取りした形状値及び零点誤差を含む測定値を記憶装置340に記憶する。
(もっと読む)
レンズの評価方法
【課題】レンズ単体で直線性、フォーカスずれ量等の長尺レンズの特性を評価するレンズの評価方法の提供。
【解決手段】レンズ測定面のXYZ測定データ点列とレンズ設計式の座標ずれ量から得たXYZ位置のずれ量と各XYZ軸周りの回転方向の各ABC方向の各チルトずれ量のうちの所定断面内での平行移動2方向とチルトの計3方向の位置ずれ量以外はレンズ全面での各位置と各チルトずれ量を用い、レンズ所定断面の測定データを所定ピッチで順次抽出した測定データを用いて計算してレンズ全面での各断面の平行移動量とチルトを求め、レンズ特性を評価する。
(もっと読む)
測定装置、測定基準及び精密工作機械
【課題】本発明は平面形状の高精度測定を変位計の走査によって実現することを課題とする。
【解決手段】面上の半径rの円に沿う凹凸を変位計Dbの回転走査で測定するときに,回転中の軸方向の出入りを検出する変位計Daと,変位計Da,変位計Dbの測定点を結ぶ直径上の,半径Rの円に沿う走査測定をする変位計Dc,変位計Dd,合計4本を用意して,半径Rの円が描かれる面が回転走査軸と同心で,前記半径rの円に対して相対的に180度回転した位置にも反転設置できる基準円輪SC上にある形にし,基準円輪SCの反転操作の前後の回転走査における4本の変位計の出力から,合計6つを選んで用いることで,走査のための回転運動誤差と半径rの円と半径Rの円に沿う凹凸形状を分離同定する。この結果得られた円に沿う凹凸形状と,別の方法を用いて複数の直径上で得られた直線に沿う凹凸形状とを数学的に合成すると平面を正しく構成することが可能となる。
(もっと読む)
高精度位置決定方法
【課題】マイクロおよびナノ加工の結果を完全に実現するためには、ナノメートル範囲の精度でマシンツールを位置決めし、その位置をサブナノメートル範囲内でロックする方法を提供する。
【解決手段】複数の位置ポイントにおいてプロファイルの導関数の数値平均を計算し、各導関数値からこの平均を減算して新しい導関数値を得るて、次にこれらの新しい値を、最高値が1の値を有するように正規化し、次に、正規化値を1よりも大きな値で乗算し、これらの値を1よりも大きな値でべき乗する。全体的な効果として、エッジの直近エリアにおいてのみ導関数値が増幅されることにより、エッジの位置がより精確に決定されるので、単一のポイント300、310が、マイクロ構造のエッジとして識別される。
(もっと読む)
タイヤの形状の比較方法及びタイヤの形状の比較方法用コンピュータプログラム
【課題】異なるタイヤ間において、子午断面形状を定量的に比較すること。
【解決手段】このタイヤの形状の比較方法は、タイヤの子午断面形状を、原点からの距離を表す動径Rとこの動径Rの傾きθとによって座標を表現する極座標系における数値情報で表す。例えば、タイヤの子午断面形状が直交座標系の座標表示(xi、yi)で表されている場合、これを極座標系の座標表示(ri、θi)で表す。ここで、ri=√(xi2+yi2)、θi=tan-1(xi/yi)である。そして、極座標系の座標表示(ri、θi)を、タイヤの子午断面形状に関する数値情報として用い、これに基づいて異なるタイヤの子午断面形状同士を比較する。
(もっと読む)
走査機構
【課題】ビデオレート以上の高速での画像取得を可能にする走査型プローブ顕微鏡用走査機構を提供する。
【解決手段】走査型プローブ顕微鏡用走査機構は、可動部4とXY弾性部材とZ弾性部材7Aと7Bと固定部5とからなるXYステージと、XYステージが固定される固定台1と、可動部4をX方向に移動させるためのX圧電体2Aと、可動部4をY方向に移動させるためのY圧電体と、可動部4の上面に固定された基板11と、基板11の上面に固定された、移動対象物をZ方向に移動させるZ圧電体3と、可動部4とX圧電体2AとY圧電体のほとんどを覆うカバー9と、Z圧電体3の周囲の可動部4とカバー9の間に設けられたダンピング部材10とを備え、Z圧電体3の上端がカバー9の上面よりも高い位置に位置している。
(もっと読む)
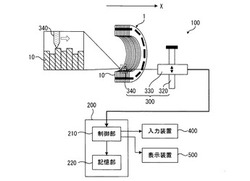
薄板の表面形状測定装置
【課題】 垂直に保持した薄板の表面形状の測定において、安定した作動、測定精度の向上、および測定結果の信頼性の向上を達成することを目的とする。
【解決手段】 基台110上に垂直保持機構120によって保持された薄板100の側縁の外側に立設された垂直駆動手段310と、左右の前記垂直駆動手段310の間に架設された水平駆動手段320と、前記水平駆動手段320に装着され前記薄板100の表面形状を測定する測定部330とを備え、前記垂直駆動手段310は、スライド機構340とこのスライド機構340に平行に前記薄板100側に配設された送り機構350とからなり、前記水平駆動手段320の端部が前記スライド機構340のスライド部360と前記送り機構350の送り部材400とによって支持されることを特徴とする。
(もっと読む)
機上形状測定方法
【課題】 原器を被測定物の形状の種類分用意することなく、また、形状が異なる度に補正のための測定を行うことなく、衝となる測定機と機上形状測定機の機差を補償する。
【解決手段】 任意の設計式にて面形状を定義できる被測定物である被測定原器17を、衝となる外部形状測定機12にて測定して形状を明らかにする工程と、超精密加工用旋盤1に設置された形状測定機3にて被測定原器17を測定して形状を明らかにする工程と、外部形状測定機12により明らかにされた形状と形状測定機3により明らかにされた形状との誤差を求める工程と、誤差に基づいて加工機上に設置された形状測定機3の測定結果に補正を与える工程とを行う。
(もっと読む)
走査型プローブ顕微鏡及び走査方法
【課題】 試料表面の凹凸形状によらず、精度よく探針と試料表面とを近接または接触させることが可能な走査型プローブ顕微鏡及び走査方法を提供すること。
【解決手段】 試料表面Sに平行な2方向の走査及び試料表面Sの垂直方向の移動を試料表面Sに対して相対的に行う探針2と、探針2及び試料表面Sの距離に応じて変化する測定量を検出する検出手段4と、探針2が試料表面Sに近接または接触した時点における観測データを採取する観測手段6と、2方向の走査及び垂直方向の移動を制御する制御手段5とを備え、探針2を試料表面Sに対して相対的に所定距離で接近離間させる接近離間駆動部24を備え、検出手段4が、接近離間駆動部24による接近時と離間時とにおける前記測定量の変化率を検出し、該測定量の変化率が、予め設定された閾値を超えるときに、観測手段6が前記観測データを採取する。
(もっと読む)
固体撮像素子及びその測定方法
【課題】固体撮像素子の各層に形成された画素の形状と各層間の位置ずれ量を正確に測定することができ、光学特性との関係を明らかにすることのできる固体撮像素子を提供すること、また、そのための各層の画素の形状及び各層間の位置ずれ量の測定方法を提供すること。
【解決手段】多層の積層構造を有する固体撮像素子10の各層には、有効画素領域部11の周縁の画素部20に隣接した重ね合わせマーク14を有効画素領域部外に形成し、各層を形成する毎に重ね合わせマーク14及びその近傍の表面形状を測定することによって、各層の画素構成要素の形状と層間の位置ずれ量のデータを得ることができるようにし、対応する画素20の光学特性を計測することにより、光学特性と各層の画素構成要素の形状及び層間の位置ずれ量との関係を非破壊で把握することができるようにした。
(もっと読む)
走査プローブ顕微鏡を用いたパターン特性測定方法およびそのシステム
【課題】
同一パターンが形成されている複数の試料間の形状もしくは物性変化を容易に把握することができる走査プローブ顕微鏡を用いたパターン特性測定方法およびそのシステムを提供することにある。
【解決手段】
複数の試料間の同一領域を測定するために、マスターパターン上に基準位置を示すパターンを成型し、測定は基準パターンを起点とした領域内で行う。また、各試料の測定結果から、パターンを形成する単位領域の検出、および各検出単位領域内における形状特性等の算出を行い、測定領域内での各種特性のばらつき、各検出領域の二次元配列精度(ピッチのばらつき)等の、試料間での変化を表示し、パターンの特性変化が容易に把握できるようにする。
(もっと読む)
板状製品のプロフィール計測装置
【課題】 計測装置自体が走行する時に生じる蛇行、うねりがあっても、それを補正して板状製品の反りやうねり及びねじれを安価に精度良く計測できることを目的とする。
【解決手段】 静止した鋼板1の上方に位置し、鋼板の長さ方向に移動する計測台車7と、計測台車の移動量を計測するPLG9と、計測台車に設置され、静止した鋼板表面までの距離を計測する3つの平面部距離計10c、10dと、計測台車の側方位置にそれぞれ設けられたピアノ線21bと、計測台車に設置され、ピアノ線に対して垂直方向の変動量を検出する垂直位置検出器11c、11dと、PLGと平面部距離計と垂直位置検出器との計測値に基づき、鋼板の長さ方向における各位置の鋼板表面までの距離を、計測台車が走行するときに生じる蛇行やうねりの影響を除去するように補正演算するデータ解析演算処理装置32とを備えて構成されている。
(もっと読む)
ウエーハの形状評価方法及び管理方法
【課題】従来では確認できなかったウエーハの形状品質についての有効な情報をSFQR等とは異なる観点から定量的に求めて、ウエーハの形状を一定の基準で的確に評価することのできるウエーハの形状評価方法を提供する。
【解決手段】ウエーハの形状を評価する方法であって、前記ウエーハの表面及び/または裏面をウエーハ径方向に沿って走査してウエーハの面形状を測定し、該測定した面形状データの所定領域から基準線を算出し、該算出した基準線と前記面形状データとの厚さ方向における差を表すローカルスロープを求めることによって、前記ウエーハの表面形状及び/または裏面形状を評価することを特徴とするウエーハの形状評価方法。
(もっと読む)
1 - 18 / 18
[ Back to top ]