
Fターム[2F077AA25]の内容
感知要素の出力の伝達及び変換 (32,270) | 目的、特徴、課題 (5,635) | 分解能の向上 (242)
Fターム[2F077AA25]に分類される特許
1 - 20 / 242
車輪回転角度検出装置
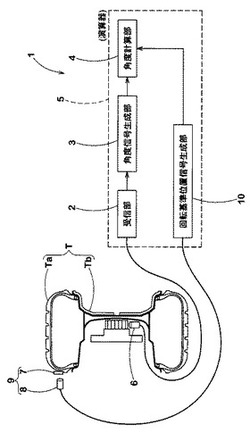
【課題】ABS信号を用いて、車輪回転角度を高精度で検出する。
【解決手段】車輪一回転につきN周期の正弦波状の波形を有するABS信号を用いて、車輪回転角度を検出する。車輪回転角度検出装置は、角度信号生成部を有する演算器を具え、該角度信号生成部は、ABS信号を時間について微分したABS微分信号を生成するステップと、ABS信号を振幅中心を閾値として2値化し、その2値化信号のエッジパルスである角度信号P1、P2を生成するステップと、前記ABS微分信号を振幅中心を閾値として2値化し、その2値化信号のエッジパルスである角度信号P3、P4を生成するステップとを行うことにより、一周期の波形毎に前記4つの角度信号P1〜P4を含む角度信号Pを生成する。
(もっと読む)
アブソリュートエンコーダ

【課題】アドレス判定を正確に行うことができ、精度が高く低コストなエンコーダを提供する。さらに、アドレス切り換え位置近傍の識別を容易にする。
【解決手段】第1波長(λ)で等間隔の第1目盛が形成され、nλ(nは拡張数、λは第1波長)で第1アドレス区間を規定するように構成されているメイントラックと、前記第1アドレス区間と同じアドレス区間が(n+1)λa(λaは第2波長)となるように等間隔で第2目盛が形成された第1アドレストラックと、前記第1アドレス区間と同じアドレス区間が、n(λa+(n2−1)λ)+λaの第3目盛が形成された第2アドレストラックとを少なくとも有するスケール部(20)を有し、前記スケールから位相差を検出し、前記検出した複数の位相差に基づいてアドレス判定を行ない、被測定対象の位置または角度を算出する処理手段(30、40、50、60、70、80)とを有する。
(もっと読む)
位置検出装置、位置検出方法及び撮像装置
【課題】 小型化及び製造コストの低減を図った上で高分解能で高精度な可動レンズの位置検出を行う。
【解決手段】 所定の方向へ動作され連続的に増加又は減少する信号を出力して光軸方向へ移動される可動レンズの絶対位置を検出する第1の検出センサーと、所定の方向へ動作され周期的かつ連続的に変化する信号を出力して前記可動レンズの相対位置を検出する第2の検出センサーとを設け、前記第1の検出センサーと前記第2の検出センサーを異なら動作速度で動作するようにした。
これにより、第2の検出センサーの着磁ピッチを大きくしたり、第1の検出センサーとしてリニアリティー誤差やヒステリシスの小さいものを用いる必要がなく、小型化及び製造コストの低減を図った上で高分解能で高精度な可動レンズの位置検出を行うことができる。
(もっと読む)
位置検出装置、及び駆動装置
【課題】被駆動体の位置を高精度に検出する。
【解決手段】位置検出装置は、変調した駆動信号を生成する変調部と、変調部によって生成された駆動信号と被駆動体の位置とに応じた検出信号を出力する検出素子を有し、変調された出力信号を検出信号に基づいて出力する検出部と、検出部から出力された出力信号を周波数逓倍した逓倍信号を生成する信号逓倍部と、信号逓倍部によって生成された逓倍信号に基づいて、被駆動体の位置を検出する位置検出部と、を備える。
(もっと読む)
目盛誤差算出装置、目盛誤差校正装置、及び目盛誤差算出方法
【課題】検出器の数を最小限にとどめながら、精度の高い目盛誤差を算出できる目盛誤差算出装置を提供する。
【解決手段】目盛誤差算出装置4は、回転軸22に支持された目盛盤2、及び目盛盤2に配設された4つの検出器3とを備えた目盛誤差校正装置1に用いられる。この目盛誤差算出装置4は、4つの検出器3で検出された各検出値に所定の係数をそれぞれ掛けて線形和を演算する検出値合成手段41と、検出値合成手段41にて演算された線形和のフーリエ成分に基づいて、目盛誤差のフーリエ成分を同定するフーリエ成分同定手段42とを備える。
(もっと読む)
回転角検出装置およびそれを用いたアクチュエータ
【課題】 部品点数が少ない回転角検出装置を提供する。
【解決手段】 ECU71は、ホールIC751により検出されたパルス信号PS1と、パルス信号PS1のエッジ間のオン時間T1、オフ時間T2およびオン時間T3から生成した仮想パルス信号PS2とに基づいて各パルス信号PS1およびPS2のエッジE1〜E7をカウントすることにより、ロータ20の回転角を3.75度ごとに検出する。この構成では、1つのホールIC751に対し、ロータ20の回転に同期した2つのパルス信号PS1および仮想パルス信号PS2を用いて回転角を検出することができる。そのため、従来2つあったホールICの数を1つに減らしたとき従来と同等以上の分解能を得ることができる。つまり、分解能を維持しつつホールICの数を減らすことが可能である。
(もっと読む)
バリアブルリラクタンス型レゾルバ
【課題】限られたステータスロット数で回転角を高精度に検出することができるVR型レゾルバを提供する。
【解決手段】VR型レゾルバは、レゾルバステータと、レゾルバロータとから構成されている。レゾルバステータ32の内周面から径方向の内側へ、2以上の整数Pと4との積に等しい個数のティースが円環状に配列されている。レゾルバロータには、3以上の奇数mと上記整数Pとの積に等しい個数の突起が放射線状に突出されている。ステータスロットの全てには、電圧の印加によって磁界を生じさせる励磁コイルが設けられている。また、ステータスロットの全てには、磁界に基づいて異なる波形の電気信号を出力する第1コイル又は第2コイルのいずれかが設けられている。
(もっと読む)
角度検出装置
【課題】温度変化による影響を受ける要因を演算により除去し、正確な角度測定を実施する。
【解決手段】シャフト12のV字溝14の両斜辺は中線Nを中心にその両側に角度±φだけ傾斜し、両斜辺にホール素子のセンサ15a、15bを取り付ける。一様な磁束密度Bの磁界内において、シャフト12を角度θ回転させると、センサ15a、15bの出力Va、Vbは、Ka、Kbをホール係数、da、dbを厚み、供給電流をIとすると、Va=(Ka/da)・I・B・sin(φ+θ)、Vb=(Kb/db)・I・B・sin(φ−θ)、(Va−Vb)/(Va+Vb)=(cosφ・sinθ)/(sinφ・cosθ)=tanθ/tanφとなり、tanθ=tanφ・(Va−Vb)/(Va+Vb)となり、tanθはKa、Kb、da、db、I、Bに無関係に求めることができる。
(もっと読む)
移動体の絶対位置検出装置
【課題】大掛かりな着磁管理をすることなく、低コストで移動体の絶対位置を検出できる移動体の絶対位置検出装置を提供する。
【解決手段】移動体の絶対位置検出装置1であって、演算器30は、逓倍回路18にて所定の区画に区分された、相対位置検出手段により検出された検出信号および逓倍回路18にて逓倍した検出信号のいずれかの区画において、絶対位置検出手段により検出した絶対位置信号が着磁信号を検出したときに、演算器30に備えられている記憶装置に1信号ピッチ分の情報を記憶し、これを移動体絶対位置特定スケール20の分解能分全てについて行うことにより移動体の絶対位置を特定する。
(もっと読む)
回転検出機能付き滑り軸受装置
【課題】 回転検出機能部の外径寸法を小さく抑えることができ、回転検出精度を向上させることができる回転検出機能付き滑り軸受装置を提供する。
【解決手段】 内周面が軸5に対して接する滑り軸受部6、および軸5の回転を検出する回転センサ部15を軸方向に並べて一体に設ける。軸5と一体に、その外周面に被検出部4を設け、この被検出部4を回転センサ部15のセンサ12で検出する。被検出部4は、例えば、多極着磁されたゴム磁石またはプラスチック磁石からなる環状の磁気エンコーダとされる。
(もっと読む)
ロータリーエンコーダー、およびモーター
【課題】小型化の可能なアブソリュート方式のロータリーエンコーダーを提供する。
【解決手段】回転位置検出用の目印を設けた回転ディスクを回転軸とともに回転させ、回
転に伴って目印が移動する経路上に複数の検出素子を設けておく。そして、回転ディスク
が回転した時に、複数の検出素子の中の何れの素子で目印が検出されたかに基づいて回転
位置を検出する。こうすれば、回転ディスク上には、回転位置検出用の目印を設けるだけ
でよい。また、複数の検出素子は目印の移動経路に沿って設ければよいので、複数の検出
素子を設けてもロータリーエンコーダーが大径化することがない。その結果、アブソリュ
ート方式のロータリーエンコーダーを十分に小型化することが可能となる。
(もっと読む)
回転角検出装置、トルク検出装置、及び電動パワーステアリング装置
【課題】高い角度分解能を確保しつつ、一の回転角センサが出力するセンサ信号に基づいて検出対象の機械的な一回転を一周期とする機械角の検出が可能な回転角検出装置を提供すること。
【解決手段】トルクセンサを構成する各回転角センサは、3倍角成分及び7倍角成分の合成波形を有するとともに回転角に応じた信号変化の位相が均等にずれた三相のセンサ信号を出力する。一方、各回転角検出部は、各センサ値a,b,cから該各センサ値a,b,cの平均値を減算して各センサ値a,b,cに含まれる7倍角成分の値を抽出することにより7倍の軸倍角を有する電気角θelを検出する。そして、その電気角θelに基づき推定される7個の機械角推定値θab_e(θab_e1〜θab_e7)を3倍角成分に換算して上記各センサ値a,b,cの平均値と比較することにより、検出対象であるステアリングシャフトの機械角θabを検出する。
(もっと読む)
バーニア式位置検出装置
【課題】位置検出の分解能を向上することができるバーニア式位置検出装置を提供する。
【解決手段】回転板3は、2枚の回転板9,10が重ね配置された形状をとる。第1回転板9の周縁に、軸4回りに沿って第1被検出突部6bを複数(3つ)設け、第2回転板10の周縁に、軸4回りに沿って第2被検出突部7bを複数(2つ)設ける。そして、第1被検出突部6bの対向位置に第1センサ部6aを配置し、第2被検出突部7bの対向位置に第2センサ部7aを配置する。第2回転板10を第1回転板9に対して基準位置から回転方向に所定角度ずらし配置する。これにより、回転板3の回転時、第1センサ部6aから割り出される符号と、第2センサ部7aから割り出される符号とが、交互に値が切り換わる。
(もっと読む)
アブソリュート型リニアエンコーダとアクチュエータ
【課題】 変形が容易な素材によりスケールを製造しても、良好な絶対位置制度が得られるように、ソフトウェア補正による方法で絶対精度の改善を行い、それによって、信頼性が高くてコンパクト化が可能であり、且つ、低コスト化が容易であってアブソリュート信号を安定して検出することが可能なアブソリュート型リニアエンコーダとそのアブソリュート型リニアエンコーダを搭載したアクチュエータを提供すること。
【解決手段】 ソフトウェア補正を施すことにより絶対位置精度を向上させることを特徴とするもの。
(もっと読む)
アブソリュートエンコーダ及び絶対位置検出装置、並びにアブソリュートエンコーダの信号パターン配置作成方法
【課題】トラック数を増やさなくても高分解能なアブソリュートエンコーダ、絶対位置検出装置、及びアブソリュートエンコーダの信号パターン配置作成方法を提供する。
【解決手段】信号パターンを読み取り可能なセンサと、センサと相対的に移動可能とされ、センサに読み取られてK(K>2)段階に分かれてセンサ出力される信号パターンを有する信号トラックを含む基体と、を含むアブソリュートエンコーダとする。また、前記アブソリュートエンコーダと、センサ出力の検出結果に基づいて、センサと基体との絶対位置を算出する演算装置とを有する絶対位置検出装置とする。
(もっと読む)
アブソリュートエンコーダ
【課題】高分解能のアブソリュートエンコーダを提供する。
【解決手段】少なくとも2種類のマークを含む複数のマークが一定の周期で第1方向に沿って配列されたスケールと、前記周期よりも小さいピッチで第1方向に沿って配置された複数の光電変換素子によって複数のマークの中の所定の数のマークを検出する検出器と、検出器の出力に基づいて検出器に対するスケールの第1方向における絶対位置を算出する算出部とを備え、算出部は、検出器から出力された所定の数の周期信号それぞれの振幅を量子化することによって所定の数のデータで構成されるデータ列を生成し、前記周期を単位とする第1位置データに変換し、所定の数の周期信号の少なくとも1つの位相から、前記周期を分割した区分の長さの分解能で前記周期の長さより短い第2位置データを算出し、第1位置データと第2位置データとを合成してスケールの第1方向における絶対位置を表すデータを生成する。
(もっと読む)
回転位置センサ
【課題】回転角度の高い分解能を得られると同時に、小型化した回転位置センサを提供すること。
【解決手段】ロータ平板13の外周部につづら折り状の励磁コイル14が形成され、内周部にロータ側ロータリィトランス7が形成されていること、ステータ平板11の外周部に、つづら折り状のn個の検出コイル12A、12B、12C、12D(本実施の形態では、n=4)が形成され、内周部にステータ側ロータリィトランス8が形成されていること、4個の検出コイル12A、12B、12C、12Dが、重なり合わないように、円周方向に並べて配置されていること、4個の検出コイルは、各々、電気角で360度/8ずつずらして配置されていること、ステータ側ロータリィトランス8及びロータ側ロータリィトランス7を介して、励磁コイル14に高周波信号を励磁する高周波励磁回路22、21を有すること、を特徴とする。
(もっと読む)
エンコーダ、サーボモータ、サーボユニット及びエンコーダの製造方法
【課題】回折干渉光を利用して分解能を向上させつつ、製造等を容易にすることが可能な、エンコーダ、サーボモータ、サーボユニット及びエンコーダの製造方法を提供する。
【解決手段】
回転格子が形成されたリング状の第1トラックTA及び第2トラックTBを有するディスク110と、第1トラック及び第2トラックに対向して固定配置され、固定格子を有して回折干渉光を検出する第1検出部130A及び第2検出部130Bと、を有し、第1トラックの複数のスリットは、湾曲スリットとして形成され、第1トラックに対向する第1検出部は、第2検出部が対向する位置におけるスリットの接線LINEBに対して、第1トラックの回折格子に含まれるスリットの接線LINEAが平行となる位置に配置される。
(もっと読む)
磁気センサー素子および回転検出装置
【課題】高い空間分解能で検出できる磁気センサー素子を提供する。
【解決手段】本発明に係る磁気センサー素子1000では、電界効果トランジスター100は、ゲート電極14と、ゲート電極14の一方側に、ゲート幅方向に並んで形成された、第1不純物領域22および第2不純物領域24と、ゲート電極14の他方側に、ゲート幅方向に並んで形成された、第3不純物領域32および第4不純物領域34と、を有し、制御部200は、第1制御および第2制御を行い、第1制御では、第1不純物領域22および第2不純物領域24を第1端子(VDD端子)に接続し、第3不純物領域32を第2端子(VSS端子)に接続し、第2制御では、第3不純物領域32および第4不純物領域34を第1端子(VDD端子)に接続し、第2不純物領域24を第2端子(VSS端子)に接続し、第1端子(VDD端子)の電位は、第2端子(VSS端子)の電位より大きい。
(もっと読む)
着磁装置及び着磁ヘッド
【課題】高精度な着磁ピッチを確保しつつ,従来の回転着磁式よりも大きな磁力による着磁を可能とする着磁装置を提供する。
【解決手段】着磁装置は,被着磁体1を所定着磁方向に極性が交互に変化するように着磁する着磁装置において,被着磁体1の着磁面に対向して接触又は近接する先端面を有するコアを有し,先端面に当該先端面の一端側から他端側に延びる導電線3を位置決めして配置する位置決め手段が設けられ,先端面の一端側から他端側への方向が被着磁体1の所定着磁方向に垂直となるように配置される着磁ヘッド16と,着磁ヘッド16の先端面が被着磁体1の着磁面の所定着磁方向に相対的に回転又は移動するように,被着磁体1又は着磁ヘッド16を回転又は移動させる駆動部と,駆動部により被着磁体1又は着磁ヘッド16を回転又は移動させながら,導電線3に交番電流を供給する電源18とを備える。
(もっと読む)
1 - 20 / 242
[ Back to top ]