
Fターム[2F077DD01]の内容
感知要素の出力の伝達及び変換 (32,270) | 機械的手段による変換(伝達) (322) | てこ、レバーを用いるもの (39)
Fターム[2F077DD01]の下位に属するFターム
弾性てこ (1)
Fターム[2F077DD01]に分類される特許
1 - 20 / 38
位置検出装置
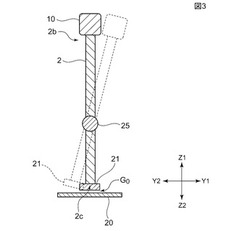
【課題】 特に、従来に比べてコストを抑えるとともに信頼性に優れた位置検出装置を提供することを目的とする。
【解決手段】 シフトレバー2と、シフトレバー2の上端部に設けられたシフトノブ10と、下端部に設けられた電極部21と、シフトレバー2を回動可能に支持する動作支点25と、電極部21と非接触にて配置された静電容量結合型センサ20と、を有する。シフトノブ10の移動操作によりシフトレバー2が回動して電極部21が前記静電容量結合型センサ20の表面を非接触を保って移動し、静電容量結合型センサ20では、電極部21の移動に伴う静電容量変化に基づいて、電極部21の位置を検出する。これによりシフトポジション情報及び各シフトポジション間の軌跡情報を取得することができる。
(もっと読む)
変位量検出装置

【課題】変位センサの電気的失陥と機構的失陥とを、故障検知方法やシステムを複雑化することなく簡便且つ正確に検出すること。
【解決手段】センサ軸24は連結部34によるペダル10との機械的な連結を解かれた状態ではセンサ本体22に対して正常時の相対変位レンジを超える位置に変位する設定になっており、センサ出力値が前記相対変位レンジにおける最大値より大きい所定の上限設定値を上回った場合、あるいは前記出力値が前記相対変位レンジにおける最小値より小さい所定の下限設定値を下回った場合には異常判定を行う電気的異常判定手段と、センサ出力値が前記相対変位レンジにおける最大値より所定量大きい設定値を上回った場合、あるいは前記出力値が前記相対変位レンジにおける最小値より所定量小さい設定値を下回るった場合には異常判定を行う機構的失陥異常判定手段とを設ける。
(もっと読む)
磁気センサ
【課題】製作時に発生する残留応力や温度変化時に発生する応力などの影響を排除し、回転角度などの検出精度を高める。
【解決手段】上蓋3と下蓋4と枠体2とでハウジング構造を形成する。このハウジング構造の内部の空間(枠体2内の上蓋3と下蓋4との対向空間6)に、柱体5をその上面5aの中心部5a1および下面5bの中心部5b1を上蓋3および下蓋4に接合した状態で支持固定する。柱体5は、上蓋3および下蓋4に間隙部G1およびG2を介して対向する第1の板面5a2および第2の板面5b2を有しており、この柱体5の例えば第1の板面5a2に、磁気抵抗素子1−1〜1−4をセンサ素子とする磁気センサ回路7を形成する。
(もっと読む)
回転角度検出器
【課題】磁界発生手段の大型化を伴うことなく、検出出力を大きくとる。磁気センサや磁界発生手段の搭載精度を緩和する。
【解決手段】磁気センサ1の感磁パターンPT2を、磁石3−1,3−2が発生する磁界Bの平行磁場が得られる最大幅W1を直径とする円4に内接するように、基板2上に形成する。具体的には、感磁パターンPT2を、4つの磁気抵抗素子1−1〜1−4の各々がつづら折りでほぼ扇形になるように形成された線状電極とする。各磁気抵抗素子1−1〜1−4は、その扇形の中心線が互いに隣接する磁気抵抗素子と90度の回転ずれを有するものとし、かつ各磁気抵抗素子1−1〜1−4の扇形の円弧を円4に内接する1/4円弧とする。
(もっと読む)
センサ装置と検出対象物との連結構造
【課題】少なくとも一軸方向に揺動可能な検出対象物Bと、検出対象物Bの動きを検出するセンサ装置Aとの連結構造において、検出対象物Bの動きをセンサ装置Aに正確に伝えることができる連結構造を提供する。
【解決手段】スライダブロック5,6に挿通された移動体100の上端部に、円筒状の凹部103aを有する円筒状の支持部103を設け、検出対象物Bの下端部に、凹部103aに嵌合される球状の球状部104aを設けた。移動体100は、球状部104aを回動支点として検出対象物Bに対して回動できるので、検出対象物BをガイドB5に沿って揺動させると、移動体100はセンサ装置Aに対して垂直な状態のまま平行移動する。これにより、検出対象物Bを直接スライダブロック5,6に挿通する場合に比べてスライダブロック5,6が歪むおそれが小さくなり、検出対象物Bの動きをセンサ装置Aに正確に伝えることができる
(もっと読む)
操作位置検出装置
【課題】検出対象である操作位置の数よりも少ない個数の磁気センサで操作位置を判別し、また、磁気センサの1つが故障しても各操作位置の検出に支障がなく、さらに、ユーザに良好な操作感を付与することができる操作位置検出装置を提供する。
【解決手段】シフトポジション検出装置1は、シフトレバー22に配置された磁石10と、磁気センサとしての第1〜第4のMRセンサ11〜14と、判別部としての制御部15と、を備えて概略構成され、第1〜第4のMRセンサ11〜14の出力の判定結果とポジションを対応させたシフトポジション情報160に基づいて各ポジションを判別する。
(もっと読む)
操作位置検出装置
【課題】検出対象である操作位置の数よりも少ない個数の角度検出センサで操作位置を判別し、また、ユーザに良好な操作感を付与することができる操作位置検出装置を提供する。
【解決手段】シフトポジション検出装置1は、主に、第1及び第2の磁石10a、10bと、第1〜第6のMRセンサ11〜16と、制御部17と、を備える。制御部17は、第1〜第4のMRセンサ11〜14からのHi及びLowの出力と第5及び第6のMRセンサ15、16の出力Lowとの組み合わせに基づいて第1のルート51におけるポジションを判別し、第1〜第4のMRセンサ11〜14からのHi及びLowの出力と第5及び第6のMRセンサ15、16の出力Hiとの組み合わせに基づいて第3のルート53のポジションを判別する。
(もっと読む)
位置検出装置
【課題】2重系の位置検出系統を1つの被検出体で実現し、かつ、小型化することができる位置検出装置を提供する。
【解決手段】位置検出装置1は、シフトレバー3の操作に応じて第1〜第3の移動線y1、y2、xに沿って移動するマグネット20と、第1の移動線y1に対しd1だけ離間する第1のMR回路11と、第1及び第2の移動線y1、y2の中間位置に配置される第2のMR回路12と、第2の移動線y2に対し第1の移動線y1とは反対側にd1だけ離間する第3のMR回路13と、位置判定部40とを備える。この位置判定部40は、第1及び第2のMR回路11、12の出力に基づいて第1の移動線y1上のマグネット20の位置を判定し、第2及び第3のMR回路12、13の出力に基づいて第2の移動線y2上のマグネット20の位置を判定する。これにより、1つのマグネットで2重系の位置検出を実現する。
(もっと読む)
位置検出装置
【課題】2重系の位置検出系統を1つの被検出体で実現し、かつ、小型化することができる位置検出装置を提供する。
【解決手段】位置検出装置1は、シフトレバー3の操作に応じて第1〜第3の移動線y1、y2、xに沿って移動するマグネット20と、第1の移動線y1に対しd1だけ離間する第1のMR回路11と、第1の移動線y1の直下に配置される第2のMR回路12と、第2の移動線y2の直下に配置される第3のMR回路13と、第2の移動線y2に対し第2のMR回路12とは反対側でd1だけ離間する第4のMR回路14と、位置判定部40とを備える。この位置判定部40は、第1及び第3のMR回路11、13の出力に基づいて第1の移動線y1上のマグネット20の位置を判定し、第2及び第4のMR回路12、14の出力に基づいて第2の移動線y2上のマグネット20の位置を判定する。これにより、1つのマグネットで2重系の位置検出を実現する。
(もっと読む)
位置検出装置
【課題】少ない数の磁気センサと単純構造のマグネットを用いてレバーの操作位置を検出できる位置検出装置を提供する。
【解決手段】シフトレバー1の操作に伴って回路基板9と平行な同一平面内を移動するホルダ7に円板状のマグネット8を固着し、回路基板9に一対の磁気センサ10(10A,10B)を実装する。マグネット8は一方の主面をN極、他方の主面をS極に着磁してあり、磁気センサ10は、非磁性材料からなる基台20の表面層に設けられた軟磁性体層22と、この軟磁性体層22の外縁部近傍に配置された少なくとも2つのホールIC21とを有し、これらのホールIC21が軟磁性体22の中心を原点とするX−Y直交座標上に配置された構成となっている。これにより、磁気センサ10のペアで検出されたホール電圧に基づいてマグネット8の磁束のX軸に対する方向(角度)を検出でき、その検出結果に基づいてシフトレバー1の複数のシフト位置を検出することができる。
(もっと読む)
検出装置
【課題】1つの検出素子を用いて2つの直線変位を検出する。
【解決手段】入力軸191が直線変位し、入力軸191から入力部123に力が加えられた場合、可動部120が直線LAを中心とする回動動作を行う。また、入力軸192が直線変位し、入力軸192から入力部124に力が加えられた場合、可動部120が直線LBを中心とする回動動作を行う。可動部120には、可動部120とともに回動する磁石140が固着されており、基部110の基準位置には磁石140の方向を検出するセンサICが取り付けられている。センサICは、可動部120の回動動作に伴う磁石140の方向を検出し、それから、入力軸191,192の2つの直線変位を特定するための信号を生成して出力する。
(もっと読む)
角度センサ及びこれを用いた回転角度検出装置
【課題】主に自動車のアクセルペダルやブレーキペダル等の回転角度検出に用いられる角度センサ、及びこれを用いた回転角度検出装置に関し、簡易な構成で、高精度な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】磁石15をばね14に付勢された回転体12の回転中心に装着すると共に、この磁石15の水平方向の磁気を、磁気検出素子17が検出することによって、ヨークやコアといった磁性材料製の部品を用いず、磁石15とこれに対向配置された磁気検出素子17のみで、回転体の回転角度の検出を行うことができるため、使用部品数が少なく簡易な構成で、安価で高精度な回転角度の検出が可能な角度センサ、及びこれを用いた回転角度検出装置を得ることができる。
(もっと読む)
操作位置算出装置
【課題】1つの磁石によって3方向の操作位置を検出する操作位置算出装置を提供する。
【解決手段】レバーコントロールスイッチ装置1の判定部5は、第1のMRセンサ40の第1のハーフブリッジ回路S1の第1の出力電圧V1と第3のMRセンサ42の第5のハーフブリッジ回路S5の第5の出力電圧V5との差分値と、第1のMRセンサ40の第2のハーフブリッジ回路S2の第2の出力電圧V2と第3のMRセンサ42の第7のハーフブリッジ回路S7の第7の出力電圧V7との差分値と、から逆正接値を算出することによって、操作部17のプッシュ操作位置を算出することができる。
(もっと読む)
回転検出装置
【課題】磁気検出素子の温度依存性の影響を受けることなく、ロータの回転態様を高い精度で検出することのできる回転検出装置を提供する。
【解決手段】この回転検出装置は、磁気センサ23と、ロータ21の回転に伴い軸線n1の周りを回転する磁石22とを備え、磁石22が回転するときに磁石22から発せられる磁界の変化を磁気センサ23により検出してロータ21の回転角度を検出する。ここでは、磁石22を、軸線n1に平行な軸線n2を中心軸とする円柱状に形成するとともに軸線n2の方向に着磁する。また、磁気センサ23を、磁石22の中心Csの描く回転軌跡を含む円周上から軸線n1の方向にギャップgだけオフセットした位置に配置し、さらに、その検出面を、磁石22の中心Csの回転平面と平行となる態様にて配置する。そして、磁気センサ23から出力される電圧信号から逆正接値を演算し、この逆正接値に基づいてロータ21の回転角度を検出する。
(もっと読む)
操作位置判断装置及びパドルシフトスイッチ
【課題】信号の切替位置のずれを抑制し、誤作動を防止する操作位置判断装置及びパドルシフトスイッチを提供する。
【解決手段】センサIC23、24から出力されたアナログ出力は、波形整形部2Aに出力され、波形整形部2Aは、アナログ出力をリニア出力に変換し、リニア出力V1及びV2をECU100に出力する。ECU100は、リニア出力V1及びV2に基づいて差分値ΔVを算出する。またECU100は、算出した差分値ΔVと内部に記憶するしきい値とを比較し、差分値ΔVがしきい値よりも大きいときHi、小さいときLo、として、切替位置を判断する。
(もっと読む)
移動センサ
【課題】 磁気抵抗効果素子を用いた非接触式の移動センサに係り、特に、位置検出のリニアリティ(直線性)を向上させることが可能な移動センサを提供することを目的としている。
【解決手段】 第1の磁石4と第2の磁石5とをX磁状に交差させ、前記磁石4,5間の空間内を、磁気抵抗効果素子(GMR素子)15を直線移動させる。前記磁石4,5間には、左側端部4b,5bから右側端部4c,5cにかけて外部磁界が回転変位した回転磁場領域が形成され、前記磁気抵抗効果素子15は前記回転磁場領域内を通るように移動支持されているので、移動に伴って、前記磁気抵抗効果素子15のフリー磁性層の磁化方向が漸次的に変動する。よって、位置検出のリニアリティ(直線性)を向上させることができる。
(もっと読む)
回転角検出装置
【課題】組付性やメンテナンス性が良好で、異音発生が抑制された入力軸構造を備えた回転角検出装置を提供する。
【解決手段】ハウジング10内に配置された回転角検出センサ2と、回転角検出センサに回転変位を入力するようにハウジングに軸受を介して回転可能に支持された入力軸20と、入力軸のハウジング筒端部から突き出た突出部21に固定された回転入力部材30とハウジングの筒端部との間に介装された弾性部材40と、入力軸の軸方向で弾性部材に隣接して配置された摺動部材50とが備えられている。
(もっと読む)
回転角検出装置
【課題】組付性やメンテナンス性が良好で、異音発生が抑制された入力軸構造を備えた回転角検出装置を提供する。
【解決手段】ハウジング10内に配置された回転角検出センサ2に回転変位を入力するようにハウジングに軸受を介して回転可能に支持された入力軸20と、ハウジングの筒端部11から突き出た入力軸の突出部21に固定された回転入力部材30と、入力軸と筒端部との間の環状空間をシールする弾性オイルシール40とを備え、オイルシールの筒端部側の延長部44が弾性部材として入力軸の軸方向に重ね合わせた摺動部材50とともに回転入力部材と筒端部との間に介装されている。
(もっと読む)
磁気式位置検出装置
【課題】マグネットから磁気検出手段にかかる磁界変化を磁気検出手段で見ることにより操作部の操作位置を検出する磁気式位置検出装置において、磁気検出手段の検出出力の直線性をより向上することができる。
【解決手段】磁気式位置検出装置4には、セレクトレバーの操作に応じてスライド移動するカウンタマグネット6と、周囲にバイアス磁界を発生するバイアスマグネット(図示略)と、これら2つのマグネットの合成磁界を検出してカウンタマグネット6のスライド位置を検出するMRセンサ8とが設けられる。カウンタマグネット6は、円リング形状のマグネットの一部分を切り出した円弧形状であり、その反り面がMRセンサ8に磁界をかける被検知面11となっている。
(もっと読む)
磁気的位置検出装置
【課題】抵抗素子および接点の構成に工夫を凝らして、振動や外部磁界が作用したときでも高精度な液面検出が可能な液面検出装置を提供する。
【解決手段】気密的に密閉されたチャンバ内に、抵抗皮膜5bおよびに抵抗皮膜5b接続された櫛歯状の複数のコンタクト5dを備える抵抗部材5と、各コンタクト5dに個別に導通接触可能な櫛歯状の複数のコンタクト6aを備えるコンタクトユニット6と、を配置し、コンタクト5dおよびコンタクト6aを、液面レベル変動によるフロートの動き追随して回転するアーム3に固定されたマグネット8の磁力により導通・開放させるとともに、コンタクト5dから離れたコンタクト6aをカバー2bに当接させている。これにより、振動や外部磁界が作用したときでも高精度な液面検出が可能な燃料レベルゲージ1を実現することができる。
(もっと読む)
1 - 20 / 38
[ Back to top ]