
Fターム[2F077QQ05]の内容
感知要素の出力の伝達及び変換 (32,270) | スケール(パルス)の読取 (1,628) | スケール又はパルス発生部材を用いるもの (1,314) | 検出器又は検出素子の配置又は配列 (1,104) | 2相信号を出力するもの (764) | 90度位相差信号 (558)
Fターム[2F077QQ05]に分類される特許
1 - 20 / 558
回転角度検出装置
回転角度検出装置
レゾルバ
回転角信号断線検出方法及び装置
レゾルバ及びレゾルバの製造方法
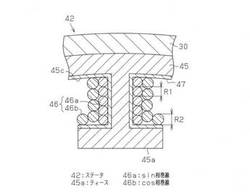
【課題】高い検出精度を確保しつつも、小型化を図ることのできるレゾルバを提供する。
【解決手段】このレゾルバは、sin相巻線46a及びcos相巻線46bが巻回された複数のティース45aがロータを囲繞するようにして設けられたステータ42と、ロータに設けられて各相の巻線46a,46bに付与する磁界を形成する励磁巻線とを備える。そして、このレゾルバでは、ロータが回転するとき、励磁巻線により形成される磁界の変化に基づき各相の巻線46a,46bに誘起される電圧が変化することにより、各相の巻線46a,46bからロータの回転角に応じた電圧信号が出力される。ここでは、ティース45aに、sin相巻線46aが巻回されるとともに、その外側にsin相巻線46aよりも大きい線径を有するcos相巻線46bが巻回される。
(もっと読む)
エンコーダ搭載機器およびエンコーダ装置

【課題】簡素な回路構成で、複数のエンコーダの検出結果を伝送することのできるエンコーダ搭載機器、およびエンコーダ装置を提供すること。
【解決手段】エンコーダ装置100およびエンコーダ搭載機器1000では、エンコーダ装置100側および制御部210側に同期式の半2重シリアル通信用のインターフェース機器150、250を設け、制御部210は、複数の演算処理部11での演算結果が各々送信されるタイミングを規定する指令信号を異なるタイミングで送信する一方、エンコーダ装置100は、指令信号に対応するタイミングで複数の演算処理部11での演算結果、および複数の演算処理部11での演算結果が出力されるタイミングに対応する同期信号CLKの各々をシリアル信号として出力する。
(もっと読む)
磁界角計測装置およびそれを用いた回転機
【課題】磁束発生体が高速に回転する場合であっても、磁束発生体または磁気センサの近傍に非磁性の導体(導電体)を配置した構成を用いて精度良く磁界角または回転角を計測すること。
【解決手段】磁界方向に感応する磁気センサ70と、非磁性の第1の導体240と、非磁性の第2の導体242とを備えた磁界角計測装置であって、前記磁気センサは、前記第1の導体と前記第2の導体との間に配置され、前記第1の導体中の渦電流が前記磁気センサに及ぼす磁界と、前記第2の導体中の渦電流が前記磁気センサに及ぼす磁界とが、互いに打ち消しあう構成とする。
(もっと読む)
バリアブルリラクタンス型角度検出器
【課題】励磁巻線から出力電圧を好適に抽出することが可能なバリアブルリラクタンス型角度検出器を提供する。
【解決手段】各コイルC1〜C4の電圧から互いに位相が異なる2相の出力電圧を取得し、該出力電圧に基づいて回転子12の回転角度を検出するものであり、周方向における回転子12の磁極幅をθr、周方向におけるティース23の磁極幅をθtとし、磁極幅比Tを、T=θt/(θr/2)として、磁極幅比Tが1以下に設定される。
(もっと読む)
回転電機
【課題】回転電機において、レゾルバを用いなくても回転子の回転角度等を検出できるようにすることである。
【解決手段】回転電機10は、予め定めた周方向配置に従って配置される複数の磁極を有するロータ20と、コイル巻線36を収容し、ロータ20に向かって開口部34を有する複数のスロット32を含むステータ30を備える。スロット32の開口部34には開口部用の絶縁体40が配置され、開口部用の絶縁体40には、ステータ30に対しロータ20が回転するときにロータ20の磁極からの磁束の変化に応じて発生する起電力を出力するセンサ導体42,44が設けられる。センサ導体42,44は、ロータ20の軸方向に垂直な断面からみて互いに異なる面方向を有する2つの導体で構成される。
(もっと読む)
直線運動案内機構付アクチュエータ
【課題】ハウジングの軸線方向の端部に軸の回転位置を検出するセンサを設けることができ、また軸のストローク以上にスケールが長くなるのを防止できる直線運動案内機構付アクチュエータを提供する。
【解決手段】ロータ4の、軸受14a,14bに支持される軸線方向の端部10c−2を、ハウジング2の内側から外側に向かって軸受14a,14bから軸線方向に突出させる。ハウジング2に設けられるセンサ27によって、軸受14a,14bから突出するロータ4の端部10c−2の回転位置を検出することを可能とする。
(もっと読む)
エンコーダおよびこれを備えた装置
【課題】エンコーダにおいて、三角関数演算の回数を削減する。
【解決手段】エンコーダは、周期パターン11が設けられたスケール10と、スケールとの相対移動が可能であり、周期パターンを読み取って、それぞれ周期パターンに応じた変化周期を有し、かつ互いに位相が異なる複数のアナログ信号を出力するセンサ20と、該センサから出力された複数のアナログ信号を時分割でアナログ−デジタル変換して複数のデジタル信号を生成するA/D変換部30と、複数のデジタル信号から位相を検出する位相検出部60と、スケールとセンサとの相対移動速度と位相検出部により検出された位相とを用いて補正値を算出し、該補正値と位相検出部により検出された位相とから補正位相を算出する補正部70と、該補正位相を用いて、スケールとセンサとの相対移動方向での位置を求める位置検出部80とを有する。
(もっと読む)
エンコーダおよびこれを備えた装置
【課題】複数の周期パターンに対する検出部による検出周期を切り替えるエンコーダにおいて、位置検出の遅れを回避する。
【解決手段】エンコーダは、第1の周期パターン11および第2の周期パターン12が設けられたスケール10と、該スケールとの相対移動が可能な検出部22とを有する。検出部22は、第1の検出状態と第2の検出状態との切り替えが可能であり、第1の検出状態にて第1の周期パターンに応じた第1の信号を出力し、第2の検出状態にて第2の周期パターンに応じた第2の信号を出力する。処理部30,40は、検出部から取り込んだ第1および第2の信号の双方を用いて第1の絶対位置を算出する第1の処理を行った後、該検出部から取り込んだ一方の信号を用いて相対移動量を算出する。処理部は、第1の処理において最後に設定した検出状態と同じ検出状態の検出部から一方の信号を取り込む。
(もっと読む)
角度センサ
【課題】センサステータを構成する順方向の平面コイルと逆方向の平面コイルの磁束密度を均等化させ、検出精度を向上させること。
【解決手段】角度センサは平面コイルが形成されたセンサロータと、その表面に対向して配置され、平面コイル10(10A〜10D)を含むセンサステータとを備える。センサステータのステータ基板上には、順方向平面コイル10B,10D及び逆方向平面コイル10A,10Cが形成される。順方向平面コイル10B,10C及び逆方向平面コイル10A,10Cは、その周方向の中央の位置にて半径方向へ伸びる対称軸L1を中心に対称形状をなし、一端10b及び他端10cを含む。各平面コイル10A〜10Dが接続線15a〜15eを介して直列に接続され、直列に接続された各平面コイル10A〜10Dの一端10b及び他端10cが、対称軸L1上に配置される。
(もっと読む)
角度検出装置
【課題】温度条件に変化があって、励磁信号に対してレゾルバ出力信号の遅延量が変動しても、角度検出誤差の発生を少なくできる角度検出装置を提供すること。
【解決手段】1相励磁2出力型のレゾルバ11を備え、レゾルバ11から出力される出力信号(a−s)、(a−c)と、同期検波を行う検波信号に基づいて角度を検出する角度検出装置において、SIN検出コイル7の出力信号(a−s)と、COS検出コイル8の出力信号(a−c)の自乗和出力を用いて、同期検波信号(f)を生成すること、を特徴とする。
(もっと読む)
角度センサ
【課題】センサステータを構成する接続線につき電磁ノイズの影響を受け難い角度センサを提供する。
【解決手段】角度センサは平面コイルが形成されたセンサロータと、その表面に対向配置され、多X型の平面コイル(10A〜10D)を含むセンサステータとを備える。センサステータのステータ基板上に設けられた順方向平面コイル10B,10Dと逆方向平面コイル10A,10Cとが接続線15a〜15eを介して直列に接続され、一連の平面コイル10A〜10Dの両端のうち一端が接続線15dを介して正極端子16に接続され、他端が接続線15aを介して負極端子17に接続される。接続線15a〜15eは、一連の平面コイル10A〜10Dの配列に沿って1周に満たない範囲で配置され、一連の平面コイルの一端10aを折り返し点として折り返し接続線15eがその他の接続線15a〜15dに沿って配置され負極端子17に接続される。
(もっと読む)
レゾルバ及びレゾルバ付き転がり軸受装置
【課題】レゾルバの大型化等やコンピュータによる計算負荷の増大を招くことなく、回転角度の誤差(角度誤差)を低減し、検出精度を高めることができるレゾルバを提供する。
【解決手段】励磁用及び出力用のコイルが設けられた環状のレゾルバステータ12と、回転軸11に取り付けられて前記レゾルバステータ12の径方向内方に配置され、当該レゾルバステータ12の内周面との径方向のギャップが周方向で変化する外周面を有しているレゾルバロータ13と、を備えているレゾルバ10であって、前記レゾルバステータ12の内周面とレゾルバロータ13の外周面との間の最小のギャップをδ1、最大のギャップをδ2としたとき、δ1に対するδ2の比率が、6.0≦(δ2/δ1)≦9.0に設定されている。
(もっと読む)
誤差周波数成分取得装置、回転角度取得装置、モータ制御装置および回転角度取得方法
【課題】レゾルバを用いてロータ回転角度を検出する装置において、調整者の負担を軽減しつつ、誤差の小さいロータ回転角度を得られるようにする。
【解決手段】角度測定値取得部210が、モータ軸の回転角度測定値を取得し、誤差算出部220が、複数の回転角度測定値の各々に含まれる誤差を算出する。そして、周波数成分取得部230が、複数の誤差から、誤差の周波数成分の位相および振幅を求める。これによって、誤差周波数成分取得装置121は、回転角度測定値に含まれる誤差の周波数成分の位相および振幅を自動的に算出することができ、当該位相および振幅を用いて回転角度測定値に対する補正を行うことができる。従って、調整者の負担を軽減しつつ、誤差の小さいロータ回転角度を得ることができる。
(もっと読む)
エンコーダ装置及びエンコーダ装置のための補正方法
【課題】 内挿精度の低下を極力抑えて、検出対象物の回転角度又は移動位置を高精度で検出する。
【解決手段】 磁気センサ10は、検出対象物の回転又は移動に応じて互いに90度だけ位相の異なる正弦波状のA相出力信号及びB相出力信号を出力する。A相出力信号及びB相出力信号のそれぞれにおいて、サンプリング値とそれを180度シフトしたサンプリング値の差が最小となる同一位相のサンプリング値を抽出し、前記抽出したサンプリング値の平均値をオフセット補正値として計算する。これらのオフセット値を用いて、A相出力信号及びB相出力信号のサンプリング値をオフセット補正して検出対象物の回転角度又は移動距離を計算する。
(もっと読む)
VR型レゾルバ
【課題】汎用性が高く、更にコネクタにかかる外的負荷に対する耐性の高い構造を有するレゾルバを得る。
【解決手段】複数の突極を備えたステータコア200を上下から挟む第1のインシュレータ300と第2のインシュレータ400を備えた構造において、第1のインシュレータ300と一体に成形された端子ピン基台部311と、第2のインシュレータ400と一体に成形されたコネクタ支持部401とを端子ピン基台部311にインサートされた端子ピン320を覆う結合部材330によって結合する。
(もっと読む)
エンコーダ及びエンコーダのパターン検出方法
【課題】検出精度を向上させ、高精度を有するエンコーダを提供すること。
【解決手段】パターンを有し、回転軸を中心として回転する回転部と、パターンを検出する第一パターン検出部と、当該第一パターン検出部とは別にパターンを検出する第二パターン検出部と、第一パターン検出部又は第二パターン検出部における検出異常の有無を検出する制御部とを備える。
(もっと読む)
1 - 20 / 558
[ Back to top ]