
Fターム[2F112BA06]の内容
Fターム[2F112BA06]に分類される特許
461 - 480 / 480
ステレオ画像処理装置
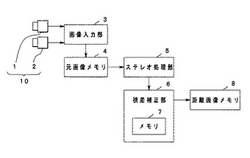
【課題】ステレオマッチング処理におけるマッチング処理を高精度にする。
【解決手段】 対象物を撮像する撮像手段1,2と、前記撮像手段で撮像した一対の画像の小領域毎に、互いの相関を求めることで対応する領域を特定するステレオマッチング処理を行い、ステレオマッチング処理結果である評価関数、該評価関数に基づいて得られる前記対象物までの距離情報及びその信頼度を示す信頼度情報を取得するステレオ処理手段5と、前記信頼度に応じて対象となる小領域の周辺に再探索範囲を設定し、前記再探索範囲内の小領域について求めた前記評価関数に基づいて、前記対象となる小領域について求めた評価関数を修正して修正評価関数を求め、求めた修正評価関数に基づいて距離情報を補正する視差補正手段6とを備えたことを特徴とする。
(もっと読む)
距離画像センサ

【課題】光検出素子の飽和を防止しながらも高SN比が得られるようにして距離の測定精度を高めた距離画像センサを提供する。
【解決手段】発光源2は対象空間に所定周期の変調信号で変調された光を照射し、光検出素子1は対象空間を撮像する。画像生成部4は、発光源2から対象空間に照射された光と対象空間内の対象物Obで反射され光検出素子1で受光される反射光との変調信号の位相差によって対象物Obまでの距離を求める。光検出素子1は、異なる長さの検出期間ごとに集積した電荷を画像生成部4に与えるように電荷の転送タイミングが制御回路部3で制御される。画像生成部4は、各長さの検出期間で集積される電荷の電荷量が光検出素子1に許容された電荷量を越えない範囲で最大になる検出期間を選択し当該検出期間における電荷量を用いて距離を求める。
(もっと読む)
人体を検知するトイレ装置と人体検出方法
本発明のトイレ装置は、障害物までの距離を測定する測距部と、判定部とを有する。判定部は予め設定されたしきい値と測距部の測定値とを比較し、測距部の測定値がしきい値より小さい時は人体有りと判断する。このしきい値は変更可能である。この構成により広いトイレ室にトイレ装置を設置する場合、判定部のしきい値を変更して大きくすれば、トイレ室に入って来た人をすぐに検出することができる。 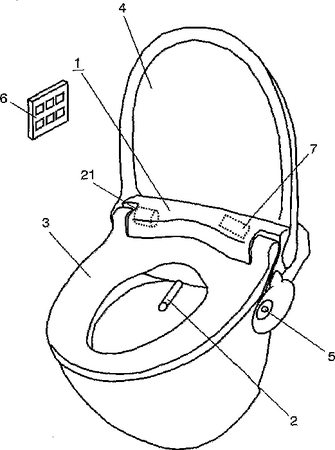 (もっと読む)
(もっと読む)
立体形状測定装置
【課題】三角測量法で高さ測定を行う場合に、測定対象が金属面などの鏡面に近く非常に強い反射光により、PSDおよびその信号処理回路で発生する飽和現象による高さ測定異常を、低減・抑制することのできる、立体形状測定装置を提供する。
【解決手段】反射光8がPSD10上での結像した像11のサイズが高さ測定方向では小さく、走査方向では大きくなるように、受光光学系9のレンズ系を構成することにより、PSD10の飽和発生頻度を低減する。さらには信号処理回路12に、特殊な飽和異常検出回路を設けることにより、飽和発生後の測定高さ異常を抑制することが出来る。
(もっと読む)
双眼視装置
【課題】 視野角が広い場合においても正確に距離測定が可能である双眼視装置を提供する。
【解決手段】 歪曲収差は、レンズ系への入射角θに依存するので、歪曲収差が無いときに光軸からr0だけ離れた点に結像すべき点が光軸からrだけ離れた点に結像したとすると、歪曲収差Vは、 V=(r−r0)/r0 で表される。この関係より、歪曲収差Vが知られているとき、光軸からr離れた点に結像した点を、光軸とその点を結ぶ線上で、光軸から r/(1+V) だけ離れた点に結像したものに変換する画像処理を行うことにより、歪曲収差の補正を行うことができる。これにより、互いに直交する平行線群を撮像したとき(a)のようになる像を、(b)のように修正することができる。
(もっと読む)
移動体周辺監視装置
【課題】ステレオ画像に基づいて物体を検出する際、計算時間の短縮と計算コストの低廉化を図る。
【解決手段】基準カメラ12により基準画像Ibを撮像し、参照カメラ14により参照画像Irを撮像する。基準画像Ib及び参照画像Irから平面領域Πfを抽出する。基準画像Ibからエッジや特徴点を抽出したエッジ画像を作成し、平面領域Πfを除去した修正エッジ画像62を生成する。修正エッジ画像62のエッジや特徴点に対して参照画像Irを参照しながら物体検出処理を行う。
(もっと読む)
測距装置
【課題】 本発明は、測定分解能を変更することのできる測距装置を提供することを目的とする。
【解決手段】本発明の測距装置は、測距対象物に向けて所定の測定用信号を発信する発信部(110)と、前記測距対象物の方向から戻る信号を受信する受信部(120)と、前記発信部及び前記受信部を駆動する測定処理を実行し、前記受信部で受信された信号に基づいて前記測定用信号の発信から受信までの時間を検知すると共に、前記受信部が信号を受信する際の分解能を可変にする制御部(100’)とを備えたことを特徴とする。
(もっと読む)
物体検出装置
【課題】画像上で複数の物体が接近し又は一部重複している場合でも、各物体を個別且つ安定に識別する。
【解決手段】検出されたトラック70の空間上での位置に基づいて物体位置領域82aを算出する。前時刻に記録された物体位置領域82aに相当するテンプレート80aを呼び出す。テンプレート80aを基準画像Ib上で類似度が最大となる位置に移動させる。物体位置領域82aと移動したテンプレート80aとの重なり割合(R(t-1)∩Rt)を算出する。重なり割合を用いて、過去に検出された物体と同一か否かを判断する。
(もっと読む)
測距装置
【課題】 測距装置、特に撮像測距装置を提供する。
【解決手段】 本発明は、三次元光景に対して同時に測距が可能な測距装置に関するものである。照射手段(22)は、スポット(12)の2次元アレイを使用して光景を照射する。検出器(6)は、照射手段(22)の近くに位置し、光景の方向を見るように配置される。プロセッサ(7)は、検出器(6)からの出力に応答し、光景の画像内のスポットの位置からそのスポットまでの距離を判断する。どの投射スポットが考慮されているかを判断する際の曖昧さを解消するために様々な技術が使用される。  (もっと読む)
(もっと読む)
車外監視装置、及び、この車外監視装置を備えた走行制御装置
【課題】誤認識を排除し、撮像手段とレーダ手段から取得できる可能な限りの多くの情報を用いて精度の良い制御を可能とする。
【解決手段】フュージョン立体物確認部18は、フュージョン立体物設定部17から入力される画像立体物単体のフュージョン立体物、ミリ波立体物単体のフュージョン立体物、画像立体物とミリ波立体物との組み合わせによるフュージョン立体物の全ての立体物に判定を行い、画像情報を基に予め定めておいた横方向の応答性遅れによるゴースト判定、壁反射によるマルチパスによるゴースト判定、及び、先行車からの反射波によるゴースト判定の条件を満たすミリ波立体物単体のフュージョン立体物を虚像であると判断する。この虚像との判定結果は設定時間維持される。こうして虚像と判断された立体物は、その後の制御対象からは除かれる。
(もっと読む)
光学式変位計のデータ伝送方法及び光学式変位計
【課題】ヘッド部からコントローラ部へのデータ伝送をシリアル伝送によって行う光学式変位計において、データ伝送に必要な線路の数を低減する。
【解決手段】ヘッド部に、AD変換器と、その出力データをシリアルデータに変換するパラレル・シリアル変換器と、その出力データをクロック信号に同期させて送信するデータ送信部とを設け、ヘッド部からコントローラ部へのデータ伝送用線路をクロック信号用とシリアルデータ用の2本の線路で構成し、コントローラ部に、クロック信号及びシリアルデータを受信するデータ受信部と、受信したシリアルデータをクロック信号に従って読み取りパラレルデータに変換するシリアル・パラレル変換器とを設け、ヘッド部からコントローラ部へ送信するクロック信号に、パラレルデータを構成する複数ビットごとの区切りを示すフレーム信号を重畳する。
(もっと読む)
測距装置、カメラおよび測距方法
【課題】 測距光のケラレによらず、高精度な測距が可能な測距装置を提供する。
【解決手段】 レンズ11、12と、複数の画素を有するラインセンサ13、14を備え、受光量に応じた信号を出力する撮像部10と、隣り合う画素のセンサデータの差が所定範囲内にある画素を、測距光がケラレている画素と判定し、該画素を除いて測距データを求める制御部2とを有している。測距光がケラレている画素を判定し、この画素を除いて測距データを求めるので、測距光のケラレが発生しても高精度に測距することができる。
(もっと読む)
量子化誤差を軽減する距離計測方法
【課題】有限画素からなる撮像素子を有するカメラを用いた三角測量法による距離計測方法において、量子化誤差を軽減することを目的とする。
【解決手段】2台のカメラの組合せにより既知の距離を予め計測しておき、計測結果に基づく量子化誤差パターンを作成する。この誤差パターンと計測結果とから誤差を表現する関数を求め、関数の最小値から、真の距離を得る。誤差を表現する関数は、誤差の自乗を縦軸とするとき、横軸に実距離をとる2次曲線で表される。
(もっと読む)
光学式変位計
【課題】ユーザの判断や操作の負担をできるだけ軽減しながら、対象物の種類等に応じて適切な計測アルゴリズムを選択することによって高い計測精度を維持することが可能な光学式変位計を提供する。
【解決手段】光学式変位計は、ワークに光を照射するための発光素子と、複数の画素構成部のそれぞれがワークからの光を受光して受光量に応じた電気信号を出力するイメージセンサーと、イメージセンサーからの電気信号を処理して受光量の分布に相当する受光波形の山部を検出し、山部のピーク位置又は重心位置を算出することによって対象物までの距離又は対象物の変位を計測する計測処理を実行する処理ユニットを備えている。計測処理部は、ピーク位置又は重心位置の算出方法が異なる複数の計測モードを有し、受光波形の山部の幅のような特徴量を抽出し(#103)、その特徴量に応じて適切な計測モードを選択する(#104〜#108)。
(もっと読む)
接近車両認識システム
【課題】 自車両に接近する車両を適切に認識する。
【解決手段】 特徴点抽出部22は、後方撮像カメラ11から入力される画像データに対して他車両の前部において所定地上高位置(例えば、方向指示器が配置される高さ位置等)で車幅方向に所定間隔Lをおいた位置(例えば、車幅方向の両端部等)に配置された1対の発光部材の認識処理を行う。特徴点相対位置検知部24は、抽出した1対の発光部材の自車両に対する相対位置を検知する。対象物距離算出部26は、抽出した1対の発光部材の自車両に対する相対距離の情報を算出する。走行支援判定部27は、1対の発光部材の自車両に対する相対位置と、抽出した1対の発光部材の自車両に対する相対距離の情報と、自車両情報検出部13にて検出した自車両の走行情報とに基づき、走行支援レベルを設定し、この走行支援レベルに応じて、報知装置17を作動させる。
(もっと読む)
レンジ検査のための測定装置および方法
本発明は、レンジデータの取得および解析を用いて物体(1)の3次元の特性を測定するための画像化装置および方法に関する。画像化装置は、測定開始前に、レンジデータの取得および解析を構成するための手段と、画素を含む少なくとも1つのセンサ(5)を用いて上記の物体(1)の画像からの反射光を検出することによって、上記の物体(1)の画像を作成するための手段と、センサの画素単位で測定された作成画像から上記の物体(1)のレンジデータを取得するための手段と、取得したレンジデータをセンサの画素値から世界座標に較正するための手段と、レンジデータを一様に離隔されたグリッドに再サンプリングすることによって、較正されたレンジデータを矯正するための手段と、較正および矯正の施されたレンジデータを解析して、上記の物体(1)の3次元の特性を得るための手段と、を備える。  (もっと読む)
(もっと読む)
光学式測距センサおよび自走式掃除機
【課題】 騒音が無く、長期安定性が比較的良好で、小型化とコスト削減ができ、しかも、測定精度が比較的高い光学式測距センサを提供すること。
【解決手段】 複数のLED51〜55からの出射光を、1つの発光レンズ1で透過して、被検出物32で反射された反射光を、受光レンズ2を介してPSD4で受光する。LED51〜55からの光出射方向によって被検出物32の方向を検出すると共に、PSD4の受光面における反射光の受光位置に基づいて、被検出物32に対する距離を検出する。焦電型センサ30で遠赤外線L10を受光することにより、被検出物32が人体であるか否かを検知する。1つの受光レンズ1によって複数のLED51〜55の出射光を透過するので、光学式測距センサの小型化とコスト削減を行うことができる。
(もっと読む)
3次元距離測定用の光電子センサおよびデバイス
本発明は変調された光子束(50)を復調する光電子センサ、および少なくとも1つのそのような光電子センサを備えた特に3次元距離測定用の測定デバイスに関する。本発明の光電子センサは、半導体領域(10)内に組み込まれ、例えば、半導体領域内で拡散され、半導体領域(10)と逆にドープされた少なくとも2つの収集領域(20、22)を備える。前記収集領域(20、22)を用いて変調された光子電流(50)の進入によって生じる少数担体が収集かつタップされる。さらに少なくとも2つの制御領域(32、34)が半導体領域(10)内に組み込まれ、前記制御領域は制御領域(32、34)に印加することのできる制御電圧に従ってドリフト領域を生成する。前記制御領域(32、34)は半導体領域(10)と同様にドープされている。
 (もっと読む)
(もっと読む)
オートフォーカスカメラ
【課題】水中の遠距離の被写体に対してオートフォーカス撮影を行う。
【解決手段】デジタルカメラには、赤外光測距を行う第1測距部と、超音波測距を行う第2測距部と、撮影環境が空気中か水中かを判定する水中検知部とが設けられている。水中検知部により撮影環境が水中と判定された場合、第2測距部を用いて測距を行う。第2測距部は、超音波を発信してから、被写体から戻ってくる超音波の反射波を受信するまでの時間を測定することで、被写体距離を測定する。このように、水中撮影時に、水中ではエネルギーが減衰しない超音波を使用して測距を行うから、遠距離の被写体に対しても正確にピントを合わせることができる。
(もっと読む)
自動フレーミングカメラ
【課題】 静止状態の被写体を探し出し自動的にフレーミングして撮影する自動フレーミングカメラを提供する。
【解決手段】 パンモータ及びチルトモータで一方向の測距が可能な測距ユニット(発光素子、受光素子)の測距方向Dが変更され(S108〜116)、測距ユニットからの信号変化で静止状態の人物Pが探し出される(S118〜122)。そして、チルトモータにより探し出された人物Pの顔の中心に撮像素子の撮影方向Dが向けられて画角の中心に人物の顔の中心がフレーミングされて(S124〜138)、撮像素子で人物の顔が撮影される。
(もっと読む)
461 - 480 / 480
[ Back to top ]