
Fターム[2F112CA05]の内容
光学的距離測定 (16,745) | 対象、用途 (2,011) | 具体的に適用対象が特定されているもの (958) | 自動車、車両 (415)
Fターム[2F112CA05]に分類される特許
401 - 415 / 415
ステレオカメラ、およびステレオカメラ用ステー
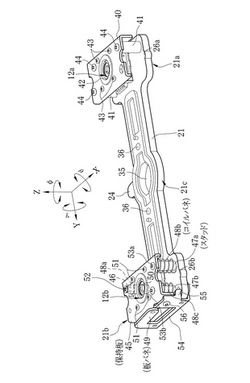
【課題】 ステレオカメラにおいて、簡単な構成で2つの撮像部の位置調整を精度よく行う。
【解決手段】 ステレオカメラ2のステー21は、第1撮像部12aが固定される固定部21aと、第2撮像部12bが取り付けられ、第2撮像部12bのピッチ、ヨー、ロール軸まわりの回転位置調整を行う調整機構が設けられた調整部21bと、固定部21aおよび調整部21bを、所定の間隔を開けて一体的に連結する基幹部21cとからなる。調整機構は、第2撮像部12bが固着される保持板45と、保持板45の一部分を第2撮像部12bのピッチ、ヨー、ロール軸まわりの回転中心として軸支するスタッド46と、保持板45に第2撮像部12bのピッチ、ヨー、ロール軸まわりの方向の回転力を与えるコイルバネ48b、48c、板バネ49と、第2撮像部12bのピッチ、ヨー、ロール軸まわりの変位量を調整するネジ53a、53b、56とを備える。
(もっと読む)
自動車シート上の対象物を検出するための装置
本発明は、対象物の2次元表現を生成するための処理ユニットとカメラを有する、自動車シート上の対象物を検出する装置に関し、装置が少なくとも2つの照明源をさらに有し、当該照明源は、対象物が様々な方向から照明されるように位置決めされ、処理ユニットが、それぞれが様々な照明条件下で生成された2つの2次元表現から対象物の3次元表現を生成するのに適していることを特徴とする。  (もっと読む)
(もっと読む)
物体検出装置

【課題】 演算量を低減する物体検出装置を提供することを課題とする。
【解決手段】 互いに視点の異なる複数の撮像画像を出力する撮像手段と、互いに視点の異なる画像間の対応付けを行う対応付手段とを備え、対応付けによって得られる視差から物体を検出する物体検出装置において、撮像画像を低解像度画像に変換する解像度変換手段と、低解像度画像による対応付けで得られた各対応点の視差が所定の視差以下か否かを判定する判定手段とを備え、高解像度画像による対応付けを行う場合、低解像度画像による対応付けで得られた対応点の位置に対応する高解像度画像の位置の近傍を探索範囲として設定して高解像度画像における対応付けを行い、判定手段により対応点の視差が所定の視差以下と判定した場合、対応点の視差が所定の視差より大きいと判定した場合より探索範囲における視差が少ない方向に対応する範囲を小さく設定することを特徴とする。
(もっと読む)
移動体周辺監視装置
【課題】ステレオ画像に基づいて物体を検出する際、計算時間の短縮と計算コストの低廉化を図る。
【解決手段】基準カメラ12により基準画像Ibを撮像し、参照カメラ14により参照画像Irを撮像する。基準画像Ib及び参照画像Irから平面領域Πfを抽出する。基準画像Ibからエッジや特徴点を抽出したエッジ画像を作成し、平面領域Πfを除去した修正エッジ画像62を生成する。修正エッジ画像62のエッジや特徴点に対して参照画像Irを参照しながら物体検出処理を行う。
(もっと読む)
物体検出装置
【課題】画像上で複数の物体が接近し又は一部重複している場合でも、各物体を個別且つ安定に識別する。
【解決手段】検出されたトラック70の空間上での位置に基づいて物体位置領域82aを算出する。前時刻に記録された物体位置領域82aに相当するテンプレート80aを呼び出す。テンプレート80aを基準画像Ib上で類似度が最大となる位置に移動させる。物体位置領域82aと移動したテンプレート80aとの重なり割合(R(t-1)∩Rt)を算出する。重なり割合を用いて、過去に検出された物体と同一か否かを判断する。
(もっと読む)
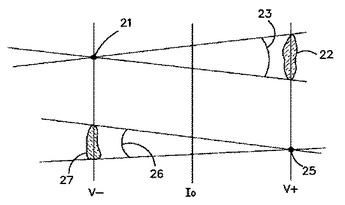
測距装置
【課題】 測距装置、特に撮像測距装置を提供する。
【解決手段】 本発明は、三次元光景に対して同時に測距が可能な測距装置に関するものである。照射手段(22)は、スポット(12)の2次元アレイを使用して光景を照射する。検出器(6)は、照射手段(22)の近くに位置し、光景の方向を見るように配置される。プロセッサ(7)は、検出器(6)からの出力に応答し、光景の画像内のスポットの位置からそのスポットまでの距離を判断する。どの投射スポットが考慮されているかを判断する際の曖昧さを解消するために様々な技術が使用される。  (もっと読む)
(もっと読む)
車外監視装置、及び、この車外監視装置を備えた走行制御装置
【課題】誤認識を排除し、撮像手段とレーダ手段から取得できる可能な限りの多くの情報を用いて精度の良い制御を可能とする。
【解決手段】フュージョン立体物確認部18は、フュージョン立体物設定部17から入力される画像立体物単体のフュージョン立体物、ミリ波立体物単体のフュージョン立体物、画像立体物とミリ波立体物との組み合わせによるフュージョン立体物の全ての立体物に判定を行い、画像情報を基に予め定めておいた横方向の応答性遅れによるゴースト判定、壁反射によるマルチパスによるゴースト判定、及び、先行車からの反射波によるゴースト判定の条件を満たすミリ波立体物単体のフュージョン立体物を虚像であると判断する。この虚像との判定結果は設定時間維持される。こうして虚像と判断された立体物は、その後の制御対象からは除かれる。
(もっと読む)
接近車両認識システム
【課題】 自車両に接近する車両を適切に認識する。
【解決手段】 特徴点抽出部22は、後方撮像カメラ11から入力される画像データに対して他車両の前部において所定地上高位置(例えば、方向指示器が配置される高さ位置等)で車幅方向に所定間隔Lをおいた位置(例えば、車幅方向の両端部等)に配置された1対の発光部材の認識処理を行う。特徴点相対位置検知部24は、抽出した1対の発光部材の自車両に対する相対位置を検知する。対象物距離算出部26は、抽出した1対の発光部材の自車両に対する相対距離の情報を算出する。走行支援判定部27は、1対の発光部材の自車両に対する相対位置と、抽出した1対の発光部材の自車両に対する相対距離の情報と、自車両情報検出部13にて検出した自車両の走行情報とに基づき、走行支援レベルを設定し、この走行支援レベルに応じて、報知装置17を作動させる。
(もっと読む)
移動制御システム
本発明は、車両またはロボットアームなど移動プラットフォームの制御に使用できる移動制御システムに関する。本発明は特に車両用の運転支援、車両用のセルフパーキング支援システムに利用できる。3次元カメラ(12)がプラットフォーム、例えば車(102)上に置かれ、プラットフォームまわりの環境を撮像する(114)ように配置される。プロセッサ(7)が3次元情報を用いて環境モデルを生成し、このモデルを利用して移動制御信号を生成する。好ましくは、プラットフォームは環境に対して移動し、様々な位置からの環境の複数の画像を取得する。 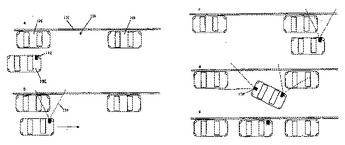 (もっと読む)
(もっと読む)
深度情報を含む画像の生成方法と装置
深度情報を含む画像を生成する方法と装置が提供される。この方法では、場面から発する放射を検出し、異なる面における場面の少なくとも2つの画像を形成する。各画像は強度データ値のセットを有する。データ値の変動が得られ、強度分散の2つのセットがデータ値から得られ、強度分散データは深度情報を得るために処理される。深度情報は、画像データにおける異なる深度情報を識別するためにコード化される。
 (もっと読む)
(もっと読む)
近接度検出器
光源(1)と、光源(1)により照明されるときに基準物から生じる後方散乱光を受光するための光検出器(3)とを備え、光検出器(3)への後方散乱される光の強度を近接度の尺度として利用することにより、第1の物体(目標物)と第2の物体(基準物)との間の近接度を検出するための装置に関する。目標物(2)は、焦点面(7)を有し光源(1)により照明される光学デバイス(4)を含む。光源(1)からの光線の軸と光検出器(3)への後方散乱による光線の軸とは互いに非常に接近し、ほぼ平行又は一致する部分を有する。近接度は目標物(2)と、ほぼ焦点面に位置する基準物(6,8)との間の間隔(相対位置)に相当する。  (もっと読む)
(もっと読む)
距離算出装置および算出プログラム
移動物体と対象物との間の方位角や、速度、ヨーレートなどの各種の状態量に基づいて、移動物体と対象物との間の距離を正確に算出することを目的とする。算出装置1は、移動物体と対象物との間の方位角を算出する手段2と、2つの時点間の移動物体の移動距離を算出する手段3と、移動方向の角度変化量を算出する手段4と、手段2、手段3、手段4の出力を用いて移動物体から対象物までの直線距離を算出する手段5とを備える。 (もっと読む)
物体までの距離の測定
本発明は、第1カメラ(1)が可視スペクトル域に感応し、第2カメラ(2)が赤外線スペクトル域に感応する2つのカメラ(1;2)を有する装置に関する。カメラ(1;2)は、少なくとも1つの物体(4)を含む同一の場面(3)の像を撮像するために相互に所定の間隔(a)をおいて配置される。装置は、さらに、所定の間隔(a)と2つのカメラ(1;2)によって撮像される像とに基づいてカメラ(1;2)からの物体(4)の距離を計算する三角測量装置(7)を備えている。  (もっと読む)
(もっと読む)
車載撮像システム及び撮像装置
【課題】1台の撮像装置で距離算出用の画像及び表示用の画像の両方を撮像可能にする。
【解決手段】撮像装置2は、広角レンズ6の左右に所要角度で傾けた左鏡7A及び右鏡7Bを配置すると共に、広角レンズ6に対向させて撮像画素部8を設ける。撮像画素部8は中央に広角レンズ6を通過した像が直接的に入射される直接領域8cを設けると共に、左右に左鏡7A及び右鏡7Bで反射された像が入射される左反射領域8a及び右反射領域8bを設ける。撮像画素部8で撮像した画像はネットワークケーブル5aで接続される画像処理ECUへ送信されて、画像処理ECUで表示用画像に変換する処理が行われると共に、左右反射領域8a、8bで撮像した画像に対して距離算出に係る処理が行われる。
(もっと読む)
車外監視装置
【課題】レーザレーダによる測距値と画像による測距値との最適な統合を複雑な演算等することなく素早く行い前方の立体物データとして素早く出力する。
【解決手段】距離データ統合部5cはレーザ距離データと画像距離データの統合を次のように行う。レーザ距離データが有効な場合、レーザ距離データが遠方の場合は最終的な距離データはレーザ距離データとし、レーザ距離データが中間距離の場合、画像距離データが有効で且つ画像距離データとレーザ距離データとの差が所定値以内の場合は最終的な距離データはレーザ距離データと画像距離データとの平均値とし、上述以外の場合はレーザ距離データとする。レーザ距離データが近距離の場合は最終的な距離データは画像距離データとし、レーザ距離データが極近距離の場合は最終的な距離データはレーザ距離データとする。またレーザ距離データが無効な場合は最終的な距離データは画像距離データとする。
(もっと読む)
401 - 415 / 415
[ Back to top ]