
Fターム[2F112DA21]の内容
Fターム[2F112DA21]の下位に属するFターム
可視 (37)
Fターム[2F112DA21]に分類される特許
101 - 120 / 216
車両周辺監視装置
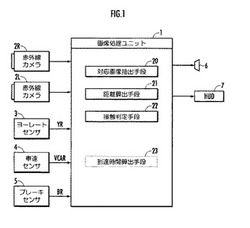
【課題】異なる画像間で同一の対象物の画像部分を探索する際の演算量を減少することができる車両周辺監視装置を提供する。
【解決手段】車両から所定距離以内の範囲に存在する対象物を監視対象とするときに、同一時点で赤外線カメラ2Rにより撮像された第1画像30及び赤外線カメラ2Lにより撮像された第2画像31を、所定距離において要求される距離分解能が確保される縮小率で縮小し、縮小後の第1画像40から対象物の第1画像部分40aを抽出して、縮小後の第2画像41内で第1画像部分40aと相関性を有する第2画像部分41aを抽出する対応画像抽出手段と、第1画像部分40aと第2画像部分41aとの視差に基づいて、第1画像部分40a及び第2画像部分41aに対応する実空間上の対象物と、車両との距離を算出する距離算出手段とを備える。
(もっと読む)
レーザー変位計、当該レーザー変位計を使用した検査装置、及び検査方法、当該レーザー変位計を使用したディスプレイパネルの製造方法

【課題】ディスプレイパネルの点灯検査においてもレーザー変位計が誤動作することなく焦点調整が可能な検査装置を提供する。
【解決手段】ディスプレイパネルを構成する画素の発光状態を検査する検査装置であって、前記ディスプレイパネルの表示方向に位置し、照射したレーザー光による前記ディスプレイパネルで反射した反射光の一部をフィルタで吸収し、該フィルタを透過した透過光を受光して前記ディスプレイパネルの変位を測定するレーザー変位計と、前記ディスプレイパネルの表示方向に位置し、前記ディスプレイパネルの画素の発光状態を撮影する光電変換素子によるセンサ部と、前記レーザー変位計で測定した変位と前記センサ部で撮影した発光状態に応じて前記ディスプレイパネルの状態を決定する演算部と、を備えることを特徴とする検査装置。
(もっと読む)
レーザ装置および距離測定装置
【課題】複数種類の波長のレーザ光を発生する構成において、より簡素な構造で出射光の波長の切換が可能な技術を提供する。
【解決手段】レーザ増幅部103の出力側の光軸に、温度によって前記基本波の高調波への変換効率が変化し、反転分極構造を有する非線形結晶107を配置し、その温度を加熱冷却装置108によって制御可能とする。この非線形結晶107は、第2高調波の生成効率が高い温度依存性を有しているので、温度を制御することで、出力に含まれる基本波と第2高調波の割合を調整可能となる。
(もっと読む)
レーザ装置および距離測定装置
【課題】複数種類の波長のレーザ光を発生する構成において、出射光の波長によるビーム中心軸のずれが生じない技術を提供する。
【解決手段】レーザ共振器103の出力側の光軸上に、偏波分離特性を有した非線形結晶107を配置し、基本波と第2高調波を得る。偏波分離特性により、出射位置の異なる基本波と第2高調波とを集光レンズ108を用いて、光ファイバ109に導き、両光線のビーム中心軸を合わせる。これにより、基本波と第2高調波とのビーム中心軸の不一致に起因する測定精度の低下が防止される。
(もっと読む)
車両周辺監視装置
【課題】視差オフセット量を算出するに際に基準とする対象物を移動する対象物として高精度に視差オフセット量を算出することができる車両周辺監視装置を提供する。
【解決手段】本発明の車両周辺監視装置によれば、2つの撮像装置の光軸間平行度ずれに起因する視差オフセット量が算出される。レーダ装置により距離が検出される一の照射領域に対象物が1つのみ存在し、かつ、一の照射領域に対応する撮像画像における一の局所画像領域に、抽出された対象物が1つのみ存在するという所定条件を満たす場合に、レーダ装置により対象物までの距離が検出されるとともに、2つの撮像装置により得られた対象物の視差が算出される。前記のことより、視差オフセット量を高精度に算出することができる。
(もっと読む)
距離画像センサ
【課題】多種多様なアプリケーションに対して、それぞれ適切な検出距離範囲を実現することができる距離画像センサを提供する。
【解決手段】光量調節部7は、投光部2から対象空間に投光される光量を調節することにより、受光部3で受光される光量を調節する。距離画像センサ1には手動設定部8が設けられ、光量調節部7で調節される光量はこの手動設定部8の操作に応じて設定される。ここに、検出距離範囲を近距離側にシフトする場合には、受光部3の飽和を回避するように投光部2からの光量を減少させ、また、検出距離範囲を遠距離側にシフトする場合には、受光部3の感度不足を回避するように投光部2からの光量を増加させることで、距離画像センサ1の検出距離範囲を変化させることができる。
(もっと読む)
車両周辺監視装置
【課題】対象物の種類に鑑みて、車両に搭載されている機器の動作を適当に制御することができる車両周辺監視装置を提供する。
【解決手段】本発明の車両周辺監視装置によれば、車両の前方に第1の接触判定領域が設定され、第1の対象物領域を基準として第2の対象物領域が存在する側に移動推定領域が設定され、第1の接触判定領域に移動推定領域の少なくとも一部が重なるか否かが判定される。四足動物が移動する方向は、胴部に対して頭部が存在している側である可能性が高いことに鑑みて、四足動物が移動する方向に設けられる移動推定領域の少なくとも一部が第1の接触判定領域に重なれば、車両と対象物とが接触する可能性が高い。一方、四足動物が移動する方向に設けられる移動推定領域が第1の接触判定領域に重ならなければ車両と四足動物との接触可能性は低い。したがって、前記のような判定手法により車両と四足動物が接触する可能性を高精度で判定することができる。
(もっと読む)
3次元情報検出装置
【課題】1台のカメラで同時に撮像した被写体の2次元画像群を基にして被写体の3次元情報を検出することを図る。
【解決手段】空間的又は時間的に強度変調された強度変調光を発生する距離検出用光源部10と、被写体で強度変調光が反射された反射光を透過する複数のレンズ15が多眼的に配置されたレンズアレイ14と、複数のレンズ15の各々を透過した透過光を2次元撮像素子の結像面で各々結像させて、複数のレンズ15の各々に対応する被写体画像群を撮像し、該被写体画像群に基づいて被写体の3次元情報を検出する3次元カメラ16と、を備える。
(もっと読む)
対象物検出システム
【課題】遠赤外線を用いて撮像された画像から、検出対象物を確実に検出することができるようにする。
【解決手段】自車両から放射された遠赤外線が、先行車両に取り付けられた再帰反射型リフレクター12によって再帰反射されて、撮像装置22に入射する。そして、遠赤外線に感度を有する撮像装置22によって、再帰反射型リフレクター12を含む領域を撮像する。撮像出力装置は、撮像装置22によって生成された熱画像から、輝度値が所定値以上となる高輝度領域を抽出すると共に、高輝度領域から再帰反射型リフレクター12を表わす領域を検出し、熱画像及び検出結果をドライバに対して表示する。
(もっと読む)
画像処理方法
【課題】簡便な手法によりシーンの奥行き推定または前景抽出可能な画像処理方法を提供すること。
【解決手段】赤色光、緑色光、及び青色光をそれぞれ透過する第1乃至第3フィルタ領域20〜22を有するフィルタ3を介して、対象物体をカメラ2により撮影するステップS10と、撮影して得られた画像データを、赤色、緑色、及び青色成分に分離するステップS11と、前記赤色、緑色、及び青色成分のそれぞれにおける画素の対応関係を、三次元色空間における線型色モデルからの画素値のずれを基準に判断するステップS13と、前記赤色、緑色、及び青色成分において対応する各画素の位置ずれ量に応じて、各画素の奥行きを求めるステップS14、S15と、前記奥行きの大きさに応じて、前記画像データを加工するステップとを具備する。
(もっと読む)
距離計
【課題】1台で近距離用から遠距離用まで使用できる距離計を提供する。
【解決手段】対象物までの距離を測定する距離計は、対象物までの距離を測定するための不可視光を発光する不可視光発光手段と、対象物を指すための可視光を発光する可視光発光手段と、対象物に向けて不可視光および可視光を同一光軸で投光する投光光学系と、投光光学系と対象物に向けた光軸を共有する対象物を見て照準するための照準光学系と、対象物からの不可視光の反射光を受光して受光信号を出力する受光手段と、 受光手段から出力される受光信号に基づいて発光から受光までの時間から対象物までの距離を求めるように制御するとともに、対象物までの距離を測定する場合と対象物を指す場合とにおいて、不可視光発光手段と可視光発光手段とを切り替えて発光させるように制御する制御手段とを備える。
(もっと読む)
車両周辺監視装置
【課題】対象物が動いている場合でもこの対象物の位置を高精度で測定することができる装置を提供する。
【解決手段】車両周辺監視装置10によれば、指定期間ΔTだけ離れている2つの時刻の間での対象物領域のサイズの変化率Rate(t)が算出される。指定期間ΔTは対象物が同一であることが確認されうる程度に画像における対象物の形状または姿勢が類似するまたは一致するように定められた時間である。このため、画像における対象物の姿勢または形状が指定期間ΔTまたはその近傍範囲の時間を周期として変化するように動いている同一対象物のサイズの変化率Rate(t)が高精度で算出される。そして、対象物領域の指定期間ΔTにわたるサイズの変化率Rate(t)を基礎とすることにより、対象物が動いている場合でも車両1から対象物までの距離または位置が高精度で測定されうる
(もっと読む)
車両用距離画像データ生成装置および車両用距離画像データの生成方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置および車両用距離画像データの生成方法を提供する。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8とこれらを制御するタイミングコントローラ9と、イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、常時発光しているために全ての撮像画像に存在する画素データを、ノイズとして除去するステップS5の処理を備えた。
(もっと読む)
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器7と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備え、画像処理部10は、パルス光を投光せずに自車両前方を撮像した外乱光ノイズ除去用のフィルタ画像に基づいて、各撮像画像の輝度を補正する。
(もっと読む)
車両用距離画像データ生成装置および車両用距離画像データの生成方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置および車両用距離画像データの生成方法を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器5と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備える。
(もっと読む)
校正基準点作成装置、校正基準点作成方法およびコンピュータプログラム
【課題】撮影領域が広くても、ステレオ撮影にて取得した画像データの三次元の校正を実行するための基礎データを簡易に取得する。
【解決手段】広がりのない光を照射可能な第一直光発光装置と、第一直光発光装置が照射する光に対して複数のカメラの撮影領域内において交点をなすように広がりのない光を照射可能な第二直光発光装置と、第一直光発光装置および第二直光発光装置を撮影領域内で移動させる移動手段と、第二直光発光装置と第一直光発光装置との中間点をマーキングするマーキング装置と、マーキングの絶対位置またはマーキングの複数のカメラとの相対位置に関する情報を取得する位置情報取得手段と、位置情報取得手段によるマーキングの絶対位置またはマーキングの複数のカメラとの相対位置に関する位置情報に基づいて、第一直光発光装置および第二直光発光装置による光の交点の位置を特定する光交点位置情報特定手段とを備える。
(もっと読む)
距離測定センサ及びそれを備えた立体カラーイメージセンサ
【課題】基板に垂直に形成されたフォトゲートを備えて光受光領域を拡張した距離測定センサ及びそれを備える立体カラーイメージセンサを提供する。
【解決手段】基板に第1不純物をドーピングして形成され、光を受けて光電荷を発生する光電変換領域と、前記基板に第2不純物をドーピングし、前記光電変換領域を挟んで互いに対向するように離隔して形成され、前記光電荷を集め保存する第1及び第2電荷保存領域と、前記第1及び第2電荷保存領域にそれぞれ対応して前記基板に所定の深さで形成される第1及び第2トレンチと、前記第1及び第2トレンチ内にそれぞれ形成される第1及び第2垂直フォトゲートとを有する。
(もっと読む)
センサーユニットを備え自立走行可能な床用集塵装置及び対象
【課題】この種の装置及び対象を光学的な三角計測システムを用いて障害物からの距離計測に関して遠方領域でも正確な距離計測ができるように、改良すること。
【解決手段】本発明は、電動モータ駆動の走行ローラ(3)、装置筺体、集塵コンテナ、及び装置カバー(6)を備えた自立走行可能な床用集塵装置(1)であって、床用集塵装置(1)が障害物検出ユニットを有し、障害物検出ユニットが光源(10、10’)と、反射光用の受光レンズ(12)状の光学素子及び光検出素子(11)を有する受光ユニット(E)とを有する三角計測システム(T)である床用集塵装置に関する。課題を解決するために、光ビームが受光ユニット(E)内で、受光レンズ(12)によって集光(コリメート)された後に、障害物(13、13’)までの実際の距離の大きさに応じて、光検出素子(11)上に入射する光ビームの変位が大きくなるように、割り振られるように制御される。
(もっと読む)
測定装置および方法、撮像装置、並びに、プログラム
【課題】簡単な構成により撮像装置と人との間の距離を確実に測定する。
【解決手段】赤目判定部122は、照明部112の光源から発せられた照明光が照射された人を撮像部111により撮像した画像内の人の目における赤目現象の発生の有無を判定する。照明制御部123は、照明部112の光源の点灯を制御する。距離測定部124は、赤目判定部122による判定結果、および、撮像部111の光軸と照明部112の光源との間の距離に基づいて、撮像部111と人との間の距離を求める。本発明は、例えば、撮像装置に適用できる。
(もっと読む)
対象物測距装置及びプログラム
【課題】検出した対象物までの距離を精度良く算出することができる対象物測距装置及びプログラムを提供する。
【解決手段】投光パターン検出部22は、画像上の投光パターン34を検出し、歩行者検出部20は、画像上の歩行者を検出し、投光器制御部24は、歩行者32の画像上の位置座標、及び投光パターン34の画像上の投光位置座標を算出し、2点の偏差が所定値以下となるような投光器14の投光角度を算出し、算出した投光角度で投光されるよう投光器14を制御し、2点の偏差が所定値以下となった場合には、撮像装置12と投光器14との距離、投光位置のX座標、及び投光器14の水平方向の投光角度に基づいて、歩行者32までの距離を算出する。
(もっと読む)
101 - 120 / 216
[ Back to top ]