
Fターム[2F112DA22]の内容
Fターム[2F112DA22]に分類される特許
1 - 20 / 37
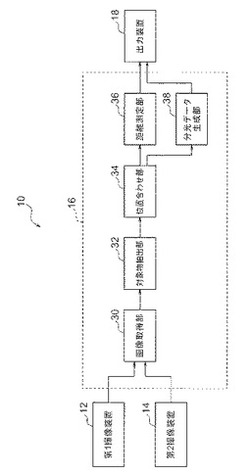
距離測定装置及びプログラム
【課題】異なる波長特性を有する複数の撮像手段を用いて、特定の対象物までの距離を精度よく測定することができるようにする。
【解決手段】各々感度を有する波長帯が異なる第1撮像装置12及び第2撮像装置14によって、各々異なる視点から所定領域を撮像する。対象物抽出部32によって、撮像された撮像画像の各々から、人間の肌についての光の波長帯の各々の反射強度に関する予め定められた条件に基づいて、人間の肌領域を抽出する。位置合わせ部34によって、撮影画像の各々から抽出された人間の肌領域の位置合わせを行って、人間の肌領域における視差量を算出する。距離測定部36によって、算出された視差量に基づいて、人物までの距離を測定し、分光データ生成部38によって、人間の肌領域の分光データを生成する。
(もっと読む)
測位装置、歩幅データ補正方法およびプログラム

【課題】 この発明は、移動量の計測にGPSを利用することなくユーザの歩幅を求めて歩幅データを補正することのできる測位装置、その歩幅データ補正方法およびプログラムを提供する。
【解決手段】 被写体の撮影を行う撮影手段と、加速度を検出する加速度センサと、方位を計測する方位センサと、歩幅データを記憶する歩幅データ記憶手段と、直線状の移動経路上の複数の地点(X1,X2)でそれぞれ行われた撮影の情報に基づき複数の地点(X1,X2)間の距離を算出する距離算出手段と、この距離とこの移動中に計数された歩数に基づいて歩幅データを補正する歩幅補正手段とを備えている。
(もっと読む)
画像処理装置
【課題】輝度のみならず被写体の表面微細凹凸の3次元情報までを高精細に再現できる小型で実現可能な画像処理装置を提供する。
【解決手段】偏光面制御素子106は、偏光板と液晶素子から構成されており、電圧により非偏光を任意の偏光面の直線偏光と変換できる。同期装置112は、偏光面制御素子106に偏光面回転の指示を送り照明の偏光面を回転させ被写体に照射すると同時に撮像素子110に撮影開始信号を送って映像を取得し、これを複数回実施する。撮像映像の信号は映像信号線111を経由して視差画像処理部108Aおよび輝度変動処理部108Bに送られる。視差画像処理部108Aでは、左右の偏光開口と中心に位置する非偏光部と通過する画像である各LL、画像RRCCを分離生成する。輝度変動処理部108Bでは、輝度値の変動を処理し、2回反射画像RTIMGを生成する。画像融合部121では、高感度の左右複数視点画像を生成して立体表示部122に送る。
(もっと読む)
測距装置、侵入者監視装置、距離計測方法、及びプログラム
【課題】
測距装置において、簡単な構成により、物体の画像からその物体までの距離を測定する。
【解決手段】
撮影手段2と、撮影手段2の撮影視野を投光する投光手段3と、制御部5と、を有し、制御部5は、投光手段3により投光しないときの被測定物の画像(無投光画像)と投光したときの画像(投光画像)とを取得し、無投光画像の輝度値と、無投光画像と投光画像との輝度差から、撮影手段2から被測定物までの距離を算出する。
(もっと読む)
距離情報取得装置、撮像装置および構造化開口ユニット
【課題】構造化開口の一定の形状に固定されていると、シーンに対する測定可能な奥行き範囲なども固定されてしまう。
【解決手段】距離情報取得装置は、入射する被写体光束を複数の波長帯に分離して検出する受光素子と、被写体光束を受光素子に導く光学系と、光学系に配され、少なくとも3つのフィルタ領域を光学系の光軸に交差する平面内に有する構造化開口とを備え、少なくとも3つのフィルタ領域は、複数の波長帯のうちの一つに含まれる互いに異なる波長帯をそれぞれ透過させ、少なくとも3つのフィルタ領域のうち選択される少なくとも2つのフィルタ領域の重心位置からそれぞれの中心までの距離は、選択される少なくとも2つのフィルタ領域ごとに互いに異なる。
(もっと読む)
被写体距離推定装置
【課題】光路長を長く取る必要がなく、スペース効率を向上でき、搭載機器の低背化、小型化を図ることが可能な被写体距離推定装置を提供する。
【解決手段】撮像レンズ系111と、撮像レンズ系111を通過した被写体像を撮像する撮像素子112と、撮像レンズ系111と撮像素子112との間に配置され、被写体像を複数の異なる色成分に分離するカラーフィルタ群113と、撮像素子から得られた画像データを処理・解析する距離推定部12と、を有し、距離推定部12は、異なる色成分の撮像画像の焦点のボケ状態を比較することにより、被写体距離が予め定められた所定値以下であるか否かを判定する。
(もっと読む)
光スイッチを備える絶対距離計
【課題】ドリフトをほとんど発生させることなく、動いているターゲットを正確に測定するADMを提供する。
【解決手段】絶対距離計(ADM)は、放出光を放出する光源を含み、スイッチ制御信号に応答して少なくとも2つの位置間で切り換わる少なくとも1つの光スイッチを有するファイバ交換網200を含み、これらの位置の第1の位置は放出光がファイバ交換網からターゲットの方へ放出され、測定光としてファイバ交換網内へ後方反射される測定モードにし、これらの位置の第2の位置は光ビームがファイバ交換網内の基準光を含む基準モードにする。ADMは、時間的に間隔を空けて多重化した形で測定および基準光を検出し、測定ビームおよび反射された光ビームの電気信号を提供する単一チャネル検出器、それに応答した電気信号を提供する単一チャネル信号処理装置、その電気信号を処理してターゲットまでの距離を決定するデータ処理装置400とを含む。
(もっと読む)
距離計測装置とその距離計測装置に用いられる受光装置
【課題】 対象物までの距離を正確に計測することができる距離測定装置、及びその距離測定装置で用いられる受光装置を提供する。
【解決手段】 距離計測装置10は、照射部4と受光装置50を備える。照射部4は、対象物30に向けて照射光20を照射する。受光装置50は、受光部60と演算部70を備える。受光部60は、対象物30で反射した反射光40を受光して電気信号に変換する。演算部70は、照射光20と反射光40に基づいて対象物30までの距離を演算する。演算部70は、計時器2と光量測定器12と距離データ計算器16を備える。計時器2は、照射された照射光20が対象物30で反射して受光部60に至るまでの時間を計測する。光量測定器12は、反射光40の光量を測定する。距離データ計算器16は、計時器2で計測された時間と光量測定器12で測定された光量を利用して、対象物30までの距離データを出力する。
(もっと読む)
距離計測装置及び距離計測方法
【課題】エッジ検出の精度に依存することなく高精度に距離を計算できるようにした、距離計測装置及び距離計測方法を提供する。
【解決手段】カメラ101、201、301と、カメラ101、201、301により取得された画像を用いて距離を算出するマイクロプロセッサ106、210とを有し、少なくとも3個以上のレーザ光を発生させるレーザ発生装置102、202、302と、レーザ発生装置の照射面とカメラのレンズ面とが同一面となるように配置される冶具103、203とを備えて構成する。
(もっと読む)
距離画像処理装置および撮影装置
【課題】距離画像内で、位置を限定することなく、所望の抽出条件に適合する対象物を特定、抽出する。
【解決手段】距離画像内で、距離値を用いて検出対象となる対象物の候補を抽出する。距離画像内で、近接する距離値が所定以上連続する画素群を対象物候補として抽出する。抽出した対象物候補は、さらにパターンマッチング、速度制限などを用い、絞り込む。得られた対象物候補の中から抽出条件に適合するものを対象物として抽出する。また、抽出条件として、先に抽出したものと同じものを抽出するよう構成してもよい。
(もっと読む)
内視鏡装置における距離情報取得方法および内視鏡装置
【課題】患者の負担の増大やコストアップを招くことなく被観察体とスコープ部の撮像素子との距離情報を取得する。
【解決手段】照明光を被観察体に照射する照明光照射部と照明光の照射により被観察体から反射された反射光を受光して被観察体の像を撮像する撮像素子とを有するスコープ部と、スコープ部の撮像素子から出力された画像信号に分光画像処理を施して所定波長の分光推定画像信号を生成する分光画像処理部とを備えた内視鏡装置において、被観察体と撮像素子の各画素との距離情報を取得する距離情報取得方法であって、分光画像処理部において、撮像素子から出力された画像信号に基づいて、650nm以上の所定波長の分光推定画像信号を距離情報取得用分光推定画像信号として生成し、距離情報取得用分光推定画像信号に基づいて、撮像素子の各画素と被観察体との距離を示す距離情報を取得する。
(もっと読む)
距離計
【課題】1台で近距離用から遠距離用まで使用できる距離計を提供する。
【解決手段】対象物までの距離を測定する距離計は、対象物までの距離を測定するための不可視光を発光する不可視光発光手段と、対象物を指すための可視光を発光する可視光発光手段と、対象物に向けて不可視光および可視光を同一光軸で投光する投光光学系と、投光光学系と対象物に向けた光軸を共有する対象物を見て照準するための照準光学系と、対象物からの不可視光の反射光を受光して受光信号を出力する受光手段と、 受光手段から出力される受光信号に基づいて発光から受光までの時間から対象物までの距離を求めるように制御するとともに、対象物までの距離を測定する場合と対象物を指す場合とにおいて、不可視光発光手段と可視光発光手段とを切り替えて発光させるように制御する制御手段とを備える。
(もっと読む)
光学式三次元測定および色測定の装置および方法
本発明は光学式三次元測定および色測定のための装置および方法に関し、この装置は、多色共焦点測定方式、三角測量測定方式または他の測定方式による光学式三次元測定のための第1のモードと、色測定のための第2のモードとの間で調整可能であり、第1のモードにおいて広帯域の照明光線が測定対象物表面の第1の平面に集束し、第2のモードにおいて広帯域の照明光線が、測定対象物の表面から一定の間隔dをおいて第1の平面の外部にある第2の平面に集束する。 (もっと読む)
センサーユニットを備え自立走行可能な床用集塵装置及び対象
【課題】この種の装置及び対象を光学的な三角計測システムを用いて障害物からの距離計測に関して遠方領域でも正確な距離計測ができるように、改良すること。
【解決手段】本発明は、電動モータ駆動の走行ローラ(3)、装置筺体、集塵コンテナ、及び装置カバー(6)を備えた自立走行可能な床用集塵装置(1)であって、床用集塵装置(1)が障害物検出ユニットを有し、障害物検出ユニットが光源(10、10’)と、反射光用の受光レンズ(12)状の光学素子及び光検出素子(11)を有する受光ユニット(E)とを有する三角計測システム(T)である床用集塵装置に関する。課題を解決するために、光ビームが受光ユニット(E)内で、受光レンズ(12)によって集光(コリメート)された後に、障害物(13、13’)までの実際の距離の大きさに応じて、光検出素子(11)上に入射する光ビームの変位が大きくなるように、割り振られるように制御される。
(もっと読む)
対象物測距装置及びプログラム
【課題】検出した対象物までの距離を精度良く算出することができる対象物測距装置及びプログラムを提供する。
【解決手段】投光パターン検出部22は、画像上の投光パターン34を検出し、歩行者検出部20は、画像上の歩行者を検出し、投光器制御部24は、歩行者32の画像上の位置座標、及び投光パターン34の画像上の投光位置座標を算出し、2点の偏差が所定値以下となるような投光器14の投光角度を算出し、算出した投光角度で投光されるよう投光器14を制御し、2点の偏差が所定値以下となった場合には、撮像装置12と投光器14との距離、投光位置のX座標、及び投光器14の水平方向の投光角度に基づいて、歩行者32までの距離を算出する。
(もっと読む)
測距用画像選択機能を有する測距装置
【課題】赤外線光量の小さい環境や、赤外線の反射率の低い対象物の場合、赤外線ステレオカメラによる測距はテクスチャ情報が少ないため測距精度が低くなる。この場合、可視光量は多く、可視光線の反射率は高い対象物であれば、可視光ステレオカメラを用いることでテクスチャ情報が増加し、精度の高い測距が可能になる。一方、赤外線光量が多く、赤外線の反射率の高い対象物であり、可視光量は少なく、可視光線の反射率は低い対象物であれば上記と逆の状況になる。
【解決手段】赤外線ステレオカメラ(3)と可視光ステレオカメラ(5)とを両方具備し、周辺の光量もしくは相関演算の一致度評価値に応じて上記2つのカメラを切替えることにより、周辺光量の変化による測距精度のばらつきが低減される。
(もっと読む)
オートフォーカス装置、オートフォーカス方法および計測装置
【課題】計測対象の反射率などによらず、フォーカスを合わせて、計測対象の撮影を可能にする。
【解決手段】計測対象である基板2に投影されるパターンを、ビームスプリッタ16で分岐し、ラインセンサ19で検出してオートフォーカスを行うオートフォーカス時と、基板2を、二次元CCDで撮影する撮影時とで、照明用光源11の光源11a〜11cを切り替え選択できるようにし、オートフォーカス時には、投影パターンのコントラストが十分得られるようにする一方、撮影時には、基板2の画像が鮮明に得られるようにしている。
(もっと読む)
車両の障害物認識装置
【課題】単一のカメラで、ステレオカメラのように、物標までの距離を検出することができる車両の障害物認識装置の提供。
【解決手段】車両前方に向かって交互に光を照射する左光源1及び右光源2と、車幅方向中央に設けられ、車両前方を撮像する単一のカメラ3と、カメラ3によって撮像された車両前方の画像から、左右の光源1及び2でそれぞれ照らされた物標20の第1の影21及び第2の影22を抽出する影抽出部4と、第1の影21の延びる方向と第2の影22の延びる方向とが成す角度βに基づいて、車両100から当該物標20までの距離を求める距離測定部5と、を備える。
(もっと読む)
携帯型測距装置
【課題】 測定対象物までの距離とともに被測定面の傾斜を広範囲に亘って判定すること。
【解決手段】 対物レンズ18を介して測定対象物に向けて測距光を出射し、その反射光を対物レンズ20を介して受光素子22で受光し、測距光と反射光間の位相差を基に測定対象物までの距離を演算部24で演算し、筐体38にも受けた基準面42の当接する被測定面の傾斜を0〜360°の範囲で傾斜計14で測定し、この測定値を演算部24に出力する。
(もっと読む)
センサ
【課題】被写体までの距離の計測の精度が悪くなるのを抑制することが可能なセンサを提供する。
【解決手段】このセンサ100は、LED2から照射されて被写体により反射された反射光を検出することにより被写体までの距離を計測するための画素42を備え、画素42は、画素42に蓄積される信号電荷を衝突電離させて増加するための高電界領域422aを含む。
(もっと読む)
1 - 20 / 37
[ Back to top ]