
Fターム[2F112DA21]の内容
Fターム[2F112DA21]の下位に属するFターム
可視 (37)
Fターム[2F112DA21]に分類される特許
61 - 80 / 216
ステレオカメラの診断方法、およびステレオカメラの診断装置

【課題】この発明は、車載のステレオカメラの位置ずれについて、処理を単純化し、低い計算コストで、一般的な運転環境下で自動的に異常を検知できるステレオカメラの診断方法、およびステレオカメラの診断装置を実現することを目的とする。
【解決手段】この発明は、ステレオ画像を取得するステレオカメラの診断方法において、カメラ画像から特徴物を検出し、光軸中心を基準として実際に検出された特徴物の検出位置と本来検出されるべき位置との垂直方向のずれに基づいてカメラの角度ずれを検出することを特徴とする。
(もっと読む)
センサー系及びその動作方法

【課題】受光面積、受光量、感度、光電荷の伝送効率、正確度を向上し、チップ上の占有面積を低減できるセンサー系を提供する。
【解決手段】本センサー系は、半導体基板上に形成され、それぞれが、第1フォトゲートと第2フォトゲートとを含む複数のフォトゲート対と、半導体基板内に形成された第1共有フローティングディフュージョン領域と、半導体基板上に形成された複数の第1伝送トランジスタと、を含む。複数の第1伝送トランジスタのそれぞれは、第1制御信号に応答して、複数のフォトゲート対のそれぞれの第1フォトゲート下に形成された複数の電荷を第1共有フローティングディフュージョン領域に伝送する。
(もっと読む)
多開口画像データの処理
多開口画像データを処理する方法およびシステムが記載され、この方法は、少なくとも第1の開口を使用して電磁スペクトルの少なくとも第1の部分に関連するスペクトルエネルギーに、また少なくとも第2の開口を使用して電磁スペクトルの少なくとも第2の部分に関連するスペクトルエネルギーに、撮像システム内の画像センサを同時に露出させることによって、1つまたは複数の物体に関連する画像データを取り込むステップと、電磁スペクトルの前記第1の部分に関連する第1の画像データおよび電磁スペクトルの前記第2の部分に関連する第2の画像データを生成するステップと、前記第1の画像データの少なくとも1つの領域内の第1のシャープネス情報および前記第2の画像データの少なくとも1つの領域内の第2のシャープネス情報に基づいて、前記取り込まれた画像に関連する深さ情報を生成するステップとを含む。 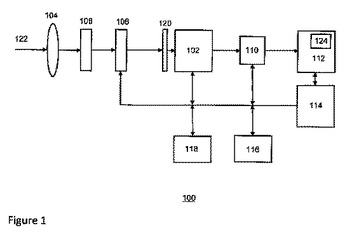 (もっと読む)
(もっと読む)
多開口画像データの処理
多開口画像データを処理する方法およびシステムが記載され、この方法は、少なくとも第1の開口を使用して電磁スペクトルの少なくとも第1の部分に関連するスペクトルエネルギーに、また少なくとも第2の開口および第3の開口を使用して電磁スペクトルの少なくとも第2の部分に関連するスペクトルエネルギーに、撮像システム内の画像センサを同時に露出させることによって、1つまたは複数の物体に関連する画像データを取り込むステップと、電磁スペクトルの前記第1の部分に関連する第1の画像データおよび電磁スペクトルの前記第2の部分に関連する第2の画像データを生成するステップと、前記第2の画像データ内の変位情報に基づいて、好ましくは前記第2の画像データに関連する高周波画像データの自己相関関数内の変位情報に基づいて、前記取り込まれた画像に関連する深さ情報を生成するステップとを含む。  (もっと読む)
(もっと読む)
画像処理装置、画像処理方法、プログラム、及び電子機器
【課題】ユーザを撮像して得られる撮像画像に基づいて、ユーザまでの距離を精度良く検出する。
【解決手段】LED21aは、被写体に対して第1の波長の光を照射し、LED21bは、被写体に対して第1の波長とは異なる第2の波長の光を照射し、カメラ22は、第1の波長の光が照射されている被写体を撮像して第1の撮像画像を生成し、第2の波長の光が照射されている被写体を撮像して第2の撮像画像を生成し、2値化部43は、第1及び第2の撮像画像に基づいて、被写体の肌領域を検出し、座標検出部44は、第1及び第2の撮像画像上の肌領域における、対応する画素の輝度値どうしの差分絶対値に基づいて、被写体までの距離を算出する。本発明は、例えば、ユーザを撮像して得られる撮像画像から、ユーザまでの距離を算出するコンピュータ等に適用できる。
(もっと読む)
内視鏡装置
【課題】照射光を被観察部に照射する内視鏡挿入部を備えた内視鏡装置において、撮像中においても内視鏡挿入部の先端と被観察部との間の距離情報を簡易な構成で取得する。
【解決手段】被観察部の近傍に設置される処置具に設けられたマークの像Mを撮像し、その撮像されたマーク画像の大きさに基づいて、内視鏡挿入部先端と被観察部との距離情報を取得する。
(もっと読む)
3次元撮像装置
【課題】一つの撮像装置で距離情報と色情報の導出を実現できて立体カラー撮像画像を得る。
【解決手段】3次元撮像装置1は、光源手段2からの投射光L1として近赤外光が被計測物Aに照射され、この投射光L1の被計測物Aからの反射光L2を受光手段3で受光し、受光手段3の受光情報に基づいて被計測物Aまでの距離情報を信号処理部4により導出する距離情報導出手段52と、自然光または照明光による被計測物Aからの反射光L2を受光手段3で受光して、この受光手段3の受光情報に基づいて被計測物AのR(赤),G(緑)およびB(青)の色情報を信号処理手段4により導出する色情報導出手段53とを有して3次元画像を撮像する。
(もっと読む)
距離センサ及び距離画像センサ
【課題】フォトゲート電極の直下の領域に発生した電荷を各半導体領域に適切に振り分けることが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】フォトゲート電極PGは、対向する第1及び第2辺を有する。第1及び第2半導体領域FD1,FD2は、フォトゲート電極PGの第1辺側において当該第1辺に沿って互いに空間的に離間して配置されている。第3及び第4半導体領域FD3,FD4は、フォトゲート電極PGの第2辺側において当該第2辺に沿って互いに空間的に離間して配置されている。第1ゲート電極TX1は、フォトゲート電極PGと第1及び第3半導体領域FD1,FD3との間に設けられている。第2ゲート電極TX2は、フォトゲート電極PGと第2及び第4半導体領域FD2,FD4との間に設けられている。第1〜第4半導体領域FD1〜FD4は、P型のウェル領域W1〜W4と重複し且つ囲まれるようにそれぞれ形成されている。
(もっと読む)
対象物特定システム、対象物特定装置、制御方法、及びプログラム
【課題】赤外線撮影手段が撮影した画像に基づいて対象物を特定すること。
【解決手段】対象物に設けられる赤外線放射体であって、赤外線放射量が異なる複数の領域を表面に有する赤外線放射体と、赤外線撮影手段300と電気的に接続された対象物特定装置110とを備え、対象物特定装置110は、赤外線撮影手段300が撮影した画像によって示される赤外線放射量の分布に、所定の異なる赤外線放射量の組合せの分布が含まれているか否かを判定する判定部114と、所定の異なる赤外線放射量の組合せの分布が含まれていると判定部114が判定した場合に、当該赤外線放射量の組合せのように赤外線を放射する複数の領域を表面に有する赤外線放射体が設けられている対象物を特定する対象物特定部115とを有する。
(もっと読む)
歩行者安全対応器
【課題】 歩行者と、前方又は後方から歩行者に接近してくる自転車との間の距離を定期的に測定し、自転車と歩行者との距離が予め定めた距離内に入ったとき、歩行者に警報を発して歩行者の傷害事故を防ぐことを可能とする機器を提供するものである。
【解決手段】 本発明の歩行者安全対応器は、赤外線発信器と赤外線受信器により歩行者とこの歩行者に接近してくる自転車との距離を定期的に検知し、その距離dが予め定めた許容距離Dよりも小さな値となったとき、警報機構が作動して音あるいは点滅光を発し、歩行者に注意喚起を行うことを可能としたものである。
(もっと読む)
距離画像取得装置
【課題】ファイババンドル型イメージガイドの屈曲に起因して距離画像の各画素間に相対的な誤差が生じることを抑制することが可能な距離画像取得装置を提供する。
【解決手段】距離画像取得装置1は、可撓性外装体3と、光源21と、第1光ガイドファイバ7と、第2光ガイドファイバ9と、反射光を受光し、基端面11Tから出射させるファイババンドル型イメージガイド11と、光源21の出射光の光行路を変更し、自己校正光21Eとしてファイババンドル型イメージガイド11に入射させる光行路変更部材15と、第1光伝搬遅延時間に対応する第1出力信号を出力する距離画像センサ23と、測定対象物33の距離画像を演算する信号処理部25とを備える。信号処理部25は、自己校正光21Eを受光した距離画像センサ23の第2出力信号に基づき、第2光伝搬遅延時間を演算し、これに基づき複数の画素ごとに距離画像を校正する。
(もっと読む)
距離測定方法、距離測定システム及び距離センサー
【課題】距離測定方法を提供する。
【解決手段】距離測定方法は、複数の変調位相オフセットで複数の積分信号を測定する段階と、複数の変調位相オフセットのうちから他の一つの積分信号に対する受信時間を調節するために、複数の変調位相オフセットのうちから少なくとも一つに対する少なくとも一つの積分信号をそれぞれ推定する段階と、推定された少なくとも何れか一つの信号によってターゲットと受信器との距離を決定する段階と、を含む。
(もっと読む)
光学式変位計
【課題】クロマティックコンフォーカル変位計の高分解能且つ高速応答化及び小型化を可能とする。
【解決手段】対物レンズ12に対し、測定対象(8)と反対側の共焦点に広帯域光源22を配置し、測定対象からの反射光が戻るときの共焦点位置に空間フィルタを設けて透過させ、測定対象に合焦した波長の被測定光を抽出し、該被測定光の波長を特定することにより、測定対象の位置を測定する光学式変位計において、コリメートされて一方向に伝播される被測定光を、その伝播方向Zと直交する2方向のX、Yの直線偏光に分ける偏光子52と、該2方向の直線偏光を通過させて、光波長に応じた位相差を持つ楕円偏光とする波長板54と、該楕円偏光を、XY間の2つの方向の偏光成分に分ける偏光分離素子56と、各偏光成分の光量を検出する受光素子58A、58Bとを備え、該受光素子で検出した光量信号A、Bを用いて、(A−B)/(A+B)の演算を行う。
(もっと読む)
目標物体を検出するためのドア感知システム
【課題】外部での適用例などに応用する際の使用に適した光スキャナ装置を提供すること、また、長い使用期間にわたって適切な動作が確保される光スキャナ装置を提供することにある。
【解決手段】目標物体(56)の距離範囲及び角方向を計測するための光スキャナ装置(10)であって、光パルスを送信するようになされたパルス源(12)と、この送信光パルスを反射し且つ可変掃引方向に掃引面(15)内部の掃引区域を横切って掃引するようになされた送信偏向手段(20)と、掃引面(15)内で反射された受信光パルスを検出するようになされた光検出手段(42)と、掃引面(15)内で反射された光パルスを反射し且つ反射された光パルスを光検出手段(42)に再誘導するようになされた受信偏向手段(24)と、光遮断手段(32)を備える。
(もっと読む)
距離計測装置とその距離計測装置に用いられる受光装置
【課題】 対象物までの距離を正確に計測することができる距離測定装置、及びその距離測定装置で用いられる受光装置を提供する。
【解決手段】 距離計測装置10は、照射部4と受光装置50を備える。照射部4は、対象物30に向けて照射光20を照射する。受光装置50は、受光部60と演算部70を備える。受光部60は、対象物30で反射した反射光40を受光して電気信号に変換する。演算部70は、照射光20と反射光40に基づいて対象物30までの距離を演算する。演算部70は、計時器2と光量測定器12と距離データ計算器16を備える。計時器2は、照射された照射光20が対象物30で反射して受光部60に至るまでの時間を計測する。光量測定器12は、反射光40の光量を測定する。距離データ計算器16は、計時器2で計測された時間と光量測定器12で測定された光量を利用して、対象物30までの距離データを出力する。
(もっと読む)
支障物検知装置及びこれを備えたプラットホームドアシステム並びに支障物検知方法
【課題】単一の光学センサにより三次元の所定の検知空間を検知可能とすると共に、屋外環境における外乱に対しても安定して支障物を検知する。
【解決手段】対象物までの距離及び対象物からの反射光量を測定する三次元距離画像センサ10Sと、三次元距離画像センサ10Sの測定結果に基づいて、検知空間DSにおける対象物の位置及び大きさを特定すると共に、当該対象物を位置及び大きさの閾値に基づいて支障物として検知するか否かを判断する検知制御部DCとを備え、検知制御部DCは、所定の検知空間DSを、三次元距離画像センサ10Sからの距離に応じた複数の検知エリアDS0〜DS4に区分すると共に、当該検知エリアDS0〜DS4ごとに支障物を検知する閾値を変更する。
(もっと読む)
画像センサとその画像センサに用いられる受光装置
【課題】 距離画像データと部位判別画像データの双方を取得可能な画像センサを提供すること。
【解決手段】 画像センサ100は、照射装置20と撮像装置40と演算装置60を備えている。照射装置20は、第1波長光を照射する第1光源22と、第2波長光を照射する第2光源を有する。演算装置60は、少なくとも第1波長光が照射装置20から対象物で反射して撮像装置40に到達するまでの距離に基づいて距離画像データを演算する。演算装置60はさらに、対象物における第1波長光の第1反射光の反射特性と対象物における第2波長光の第2反射光の反射特性の差に基づいて部位判別画像データを演算する。
(もっと読む)
物体検知装置
【課題】距離センサの視野内にドアが存在する場合でも、監視対象である物体の状態をドアの移動と分離して判断可能にする。
【解決手段】距離センサAは、視野領域に存在する物体までの距離を計測して距離画像を生成する装置であり、ドアにより開閉される開口部の上方に配置され視野領域が下方に設定される。距離センサAの視野領域には、走行駆動されて開口部を開閉するドアが含まれる。領域規定手段9は、ドアが出入する領域を含む第1の監視領域と、ドアパネル間の隙間の領域である第2の監視領域と、開口部の外側で開口部から規定範囲内である第3の監視領域とを規定する。また、領域規定手段9は、ドアの開閉の動作に伴って各監視領域の大きさを変化させる。判断手段10は、各監視領域内における物体の存否を判断し、検知出力手段11は、判断手段10の判断結果に応じた出力信号を外部に出力する。
(もっと読む)
画像処理装置および画像処理方法
【課題】従来の画像処理装置の構成を大きく変えることなく、軽量でしかも小型な構成で被写体の距離情報を取得する。
【解決手段】画像処理装置は、回折格子と撮像光学系を介して得られる対象物体の像を撮像部を用いて撮像することにより得られた回折画像を取得し、回折画像の輝度勾配から実像を検出し、回折画像において、前記検出された実像と、この実像に対応する虚像との距離を算出し、第1算出手段で算出された距離を用いて対象物体と前記回折格子との奥行き距離を算出する。
(もっと読む)
3D光学作像システム
【課題】簡単なハードウェア構成で高解像度の3Dキャプチャが可能な3Dカメラを提供する。
【解決手段】3D作像装置30は、一連のIR光のパルスを射出する光源装置42と、各々がIR光に感度のある感光セルのアレイを有するカメラ60と、被写体からの光を感光セルに、光の各光線が共通の焦点を通るように送るための撮像レンズと、光のパルスの射出と同期して、カメラ60によってキャプチャされた画像を交互に記憶する2個のメモリ64及び66と、2個のメモリ64及び66に記憶された2個の連続した画像と、光源装置42、カメラ60及び対象点102の位置とを利用して、被写体の深度マップを計算する信号処理装置と、を含む。光源装置42から射出される光のパルスは、交互に第1及び第2の強度を有する。
(もっと読む)
61 - 80 / 216
[ Back to top ]