
Fターム[2F112EA20]の内容
Fターム[2F112EA20]に分類される特許
1 - 18 / 18
変位センサ

【課題】計測処理に用いられる受光量データに飽和や不足が生じた場合でも、この受光量データが速やかに適切な状態に復帰するような感度調整を行う。
【解決手段】変位センサ1の受光部102に撮像素子12からの受光信号をそれぞれ異なる倍率で処理する信号処理部C1,C2,C3を設ける。このセンサ1では、投光部101および受光部102による検出処理の都度、信号処理部C1により生成された受光量データを用いて変位量を計測し、さらに次の検出処理の感度を調整する。感度の調整処理において、信号処理部C1による受光量データ中のピーク値が0に近似する場合には、より高い倍率が適用された信号処理部C2により抽出されたピーク値を使用する。また信号処理部C1による受光量データ中のピーク値が飽和している場合には、1倍の倍率が適用された信号処理部C3により抽出されたピーク値を使用する。
(もっと読む)
光学式位置検出装置

【課題】光検出器の感度指向性の影響を受けにくくすることにより、対象物体の位置にか
かわらず光検出器での受光強度を高いレベルとすることのできる光学式位置検出装置を提
供すること。
【解決手段】光学式位置検出装置10において、光検出装置30は、光検出器31を変位
させて光検出器31の受光部32を検出空間10R内の複数領域10R1、10R2、1
0R3に向かせるアクチュエータ35を備えており、光検出器31は、受光部32が検出
空間10R内の複数の領域10R1、10R2、10R3に向いた状態で、対象物体OB
で反射した検出光を検出する。このため、光検出器31が感度指向性を有する場合でも、
光検出器31の高感度角度範囲Θhのみで検出空間10R全体をカバーすることができる
。
(もっと読む)
距離情報抽出方法及び該方法を採用した光学装置
【課題】距離情報抽出方法及び該方法を採用した光学装置を提供する。
【解決手段】数学的に理想的な波形ではない実際の非線形的波形を考慮し、光学装置と被写体との間の距離を決定する方法及び装置が開示され、該方法と装置は、被写体に投射された波形の類型の制限を受けることなく正確な距離情報を抽出でき、歪曲及び非線形性がほとんどない高価の光源や光変調素子を使用する必要がなく、複雑な誤差補償手段が要求されない。また、既存の光源、光変調素子及び光学装置をそのまま利用でき、追加コストがかからない。さらに、あらかじめ計算された距離情報が保存されているルックアップテーブルを使用するために、距離情報を抽出するにおいて演算量が非常に小さいので、リアルタイム距離情報映像の撮影が可能である。
(もっと読む)
三次元画像を撮影するための方法
本発明は、重複する撮影領域を有する2つのカメラ(1a、1b)を用いて対象物の三次元画像を撮影するための方法に関し、較正プロセスの過程において、前記各カメラ(1a、1b)に対してそれぞれ、相互に属するエピポーラ線群を求める。予め設定されたランダム画像(40)を、撮影されるべき対象物(30)上に投影する。カメラの各ピクセルに対して、第1の周辺区域(13a)を特定し、属する第1のエピポーラ線(9a)を特定し、当該第1のエピポーラ線(9a)に対して、第2のカメラ(1b)の対応する第2のエピポーラ線(9b)を特定する。前記第2のエピポーラ線(9b)上に位置する、前記第2のカメラ(1b)の画像の全ピクセル(8b)に対して、第1の周辺区域に対して合同の第2の周辺区域(13b)を特定する。第1のおよび第2の周辺区域(13a、13b)の強度値を相互に比較し、一致度を形成する。一致度が最大である、第2のエピポーラ線(9b)上の画像位置(14)を特定する。事前に特定されている変換によって空間位置(17)を特定する。三次元画像は、このようにして求められた空間位置(17)を含む。 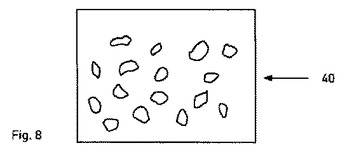 (もっと読む)
(もっと読む)
光波距離計
【課題】可変式受光濃度フィルターが不要であって、測距光量をより高速に調節できる光波距離計の提供。
【解決手段】一定周波数の搬送波を重畳化した信号によって強度変調された光を送出する光送出手段100と、光送出手段100の光を測定地点に配置した目標反射物22または参照光路25のうち選択された一方に送出する光分出手段102と、目標反射物22で反射された測距光または参照光路25を通過した参照光を受光して測距信号と参照信号を出力する受光手段(受光素子30)と、測距信号と参照信号の位相差によって目標反射物22までの直線距離を求める距離算出手段(CPU41)と、を備えた光波距離計において、光送出手段100に光量調節手段101を設けた。
(もっと読む)
光電センサ
【課題】レーザ光源の時間的に高精度な応答を可能にした光電センサを提供する。
【解決手段】光電センサ10は、レーザ光源14を使って監視範囲24にレーザパルス18を発光する発光部12、及びレーザ光源がレーザパルスを発光する作動状態、又は準備状態に、発光部を移すように構成されているレーザ光源用の駆動回路16,30を備える。この駆動回路は更に、発光部をレーザパルスの発光前それぞれにのみ準備状態に移すように構成されている。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、物体10にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形の周期を干渉波形が入力される度に計測する信号抽出部7と、信号抽出部7が計測した個々の周期に基づいて物体10の変位と速度のうち少なくとも一方を算出する演算部8とを備える。
(もっと読む)
3次元形状計測用撮影装置および方法並びにプログラム
【課題】被写体にパターン光を照射することにより取得した画像を用いて、被写体の3次元形状を正確に計測する。
【解決手段】第1のカメラ2により被写体のプレ画像を取得し、演算部5がプレ画像上に複数の領域からなる照射範囲を設定する。さらに、照射範囲内の領域毎にパターン光照射の有無を判定する。次いで、第1および第2のカメラ2,3によりパターン光を照射しない撮影およびパターン光を照射する撮影を行い、非照射基準画像G1および照射基準画像G1′、並びに非照射参照画像G2および照射参照画像G2′を取得する。これらの画像の画像データから画像ファイルを生成し、画像ファイルのヘッダに照射範囲内の各領域におけるパターン光照射の有無の情報を記述する。
(もっと読む)
擬似乱数型パルス列を使うライダーシステム
【課題】レーザーの電力を効果的に増やすよう作用するレーザーパルス列により電力に付随する非線形的影響を減じ、背景ノイズの影響を受けにくいライダーシステムを提供する。
【解決手段】光検出及び測距システムは、複数の光パルスを有する送信光パルスタイミング列30を疑似乱数型タイミングでターゲット36に向けて送信する送信器12を具備する。光学的受信器14は複数の光パルスを有する反射光パルスタイミング列40をターゲット36から受信する。電子制御ユニットは送信光パルスタイミング列30と反射光パルスタイミング列40の間の遅延時間を、送信及び反射光パルスタイミング列40の間の相関関数として識別する。
(もっと読む)
光周波数発生器を用いた絶対距離測定方法及びシステム
【課題】光周波数発生器を用いた絶対距離測定方法及びシステム。
【解決手段】(a)光周波数発生器100を用いて、安定化した異なる複数の波長λiを生成するステップと、(b)周波数走査干渉計200を用いて、測定する距離の初期推定値を取得するステップと、(c)取得した初期推定値の不確度の範囲を分析するステップと、(d)多波長干渉計によって各波長λiに対する干渉信号を解析して、各波長λiに対する小数部εiを測定するステップと、(e)初期推定値の不確度の範囲内で、各波長λiに対する整数部miを決定するステップと、(f)上記異なる複数の波長λiに対するそれぞれの小数部εi及び整数部miを用いて、測定する距離の絶対距離Lを測定するステップとを含む。
(もっと読む)
対象物測距装置及びプログラム
【課題】検出した対象物までの距離を精度良く算出することができる対象物測距装置及びプログラムを提供する。
【解決手段】投光パターン検出部22は、画像上の投光パターン34を検出し、歩行者検出部20は、画像上の歩行者を検出し、投光器制御部24は、歩行者32の画像上の位置座標、及び投光パターン34の画像上の投光位置座標を算出し、2点の偏差が所定値以下となるような投光器14の投光角度を算出し、算出した投光角度で投光されるよう投光器14を制御し、2点の偏差が所定値以下となった場合には、撮像装置12と投光器14との距離、投光位置のX座標、及び投光器14の水平方向の投光角度に基づいて、歩行者32までの距離を算出する。
(もっと読む)
光学系駆動装置及び車両用光スキャン装置
【課題】コイルのインダクタンスを下げ、コイルの温度上昇を防止することのできる光学系駆動装置及び車両用光スキャン装置を提供することである。
【解決手段】光学系駆動装置25は、レンズ34、35、36と、該レンズ34、35、36を備えたホルダと、該ホルダを上記光学素子の光軸に垂直方向に移動可能に支持する支持手段と、上記ホルダをレンズ34、35、36の光軸に垂直方向に駆動する2軸アクチュエータ備えている。この2軸アクチュエータは、アジマスコイル80と、該アジマスコイル80を挟んで対向する磁石92a、92bと、これら磁石92a、92bの表面でアジマスコイル80側に配された銅板91a、91bと、を有して構成される。
(もっと読む)
電子ビーム描画装置及びマスクの製造方法
【課題】電子ビーム描画装置において試料表面の高さを正確に測定する。
【解決手段】電子ビームを偏向器で偏向して試料面上にパターンを描画する電子ビーム描画装置であって、試料2の高さ位置を測定するための光源61と、試料の表面に光源より発せられた光を照射するための光学系と、受光素子からなる試料の表面より反射した光の受光位置により試料の高さ位置を検出する検出器75と、を備え、試料に照射される光が、P波とS波の混合比率を制御した光で反射率を高めたことを特徴とする。
(もっと読む)
前方車両認識装置
【課題】光を投光して種々の対象物との距離又は傾きを検出可能な前方車両認識装置を提供すること。
【解決手段】投光パターン20が投光された対称物を撮影し、撮影された投光パターン20の形状に基づき対象物との距離L又は傾きθを検出する車両認識装置1において、投光パターンを投光するための複数の点灯パターンを記憶した点灯パターン記憶手段13bと、撮影された投光パターン20の検出状態に基づき点灯パターンを変更する変更手段14aと、を有することを特徴とする。
(もっと読む)
光抽出装置、光抽出方法及び距離計測システム
【課題】測距対象物に対する太陽光などの背景光の明るさが変化した場合でも、測距対象物に照射した光(照射光)を精度よく抽出できるようにする。
【解決手段】波長間情報算出部15で算出した第1の波長(照射波長)と第2の波長(非照射波長)間における輝度値の比に基づいて、波長設定部16で設定した非照射波長の輝度値に応じた照射波長の照射光に対する輝度値を算出し、算出した照射波長に対する輝度値と照射光を照射したときにおける照射波長の輝度値との差に基づいて、照射装置5から測距対象物としての先行車Aに照射した照射光aを抽出する照射光抽出部18を備えている。
(もっと読む)
光電センサ
【課題】様々な表面加工がされている物体、あるいは、様々な包装で包まれている物体についても、精度よく物体の検出を行う技術を提供することを課題とする。
【解決手段】センサヘッドは、光を照射して、その反射光をラインセンサで受光する。そして、ラインセンサの出力から受光量分布を得る。受光量分布に、複数の極大値が検出された場合(ステップS23でNO)には、多重反射が発生していると判断し、物体が存在すると判定する。極大値が検出されない場合(ステップS23でNO)にも、状態が変化したことから物体が存在すると判定する。また、極大値の数が1つであっても、ピークの位置が閾値の範囲を超えていれば(ステップS24でNO)、物体が存在すると判定する。さらに、受光波形の幅が規定範囲内を超えている場合(ステップS25でNO)にも、物体が存在すると判定する。
(もっと読む)
距離検出装置
【課題】光検出器において2光子吸収させ、当該光検出器が出力する電気的な検出信号の周波数スペクトルから前記反射点までの距離を高精度で測定することができるが低コストで製造可能な距離検出装置に関する。
【解決手段】第1レーザ光源および第2レーザ光源と、2つのレーザ光を同一の変調周波数で変調する変調器と、第1レーザ光源から出射された光の反射光と、第2レーザ光源からのレーザ光とが結合されてなるレーザ光を増幅する第2光増幅器と、第2光増幅器からのレーザ光を受光し2光子吸収により電気出力を発生する光検出器と、光検出器の出力信号に含まれる正弦波成分を抽出して、第1レーザ光源の光路を反射して戻ってくる光の反射位置に対応する周波数成分を検出する周波数検出器とを備える。
(もっと読む)
距離測定装置
【課題】 簡便で高精度な距離測定を実現する。
【解決手段】 電圧制御発信器8の出力信号は変調信号9として発光素子を駆動するとともに位相比較器11に入力され、かつ出力信号14として外部に出力される。受光素子で検出された信号は受信信号10として位相比較器11の他方の入力に接続される。 位相比較器11は二つの入力位相を比較し位相差に対応した位相信号14を出力する。位相信号14はループフィルタ15に入力され周波数制御信号13に変換されて電圧制御発信器8の周波数制御入力に接続される。 変調信号9と受信信号10の位相差が一定になるように電圧制御発信器8の発信周波数が制御される。
(もっと読む)
1 - 18 / 18
[ Back to top ]