
Fターム[2F112FA08]の内容
光学的距離測定 (16,745) | データ処理回路 (4,598) | A/D変換(多値化) (462) | 2値化 (135)
Fターム[2F112FA08]の下位に属するFターム
しきい値の決定、変更 (57)
Fターム[2F112FA08]に分類される特許
1 - 20 / 78
物体検出装置および情報取得装置
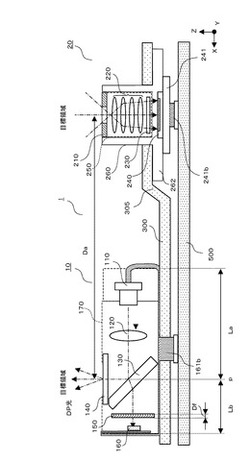
【課題】透過率の再現性が高い分光素子を用いながら、適正にレーザ光源の光量制御が可能な情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、発光装置10と、受光装置20と、を備える。発光装置10は、レーザ光源110と、コリメータレンズ120と、リーケージミラー130と、リーケージミラー130によって反射されたレーザ光をドットパターンを有するレーザ光に変換するDOE140と、リーケージミラー130を透過したレーザ光を受光して受光量に応じた検出信号を出力するFMD160と、リーケージミラー130とFMD160との間に配置され、リーケージミラー130を透過したレーザ光の光量を減衰させるフィルタ150と、FMD160の検出信号に基づいて、レーザ光源110の発光量を制御するAPC制御部21bと、を有する。
(もっと読む)
測距方法及び到達時間算出方法

【課題】赤外線カメラによる測距方法を提供する。
【解決手段】赤外線カメラで、目標を含む移動物体の赤外線像を光学的に走査して赤外線熱画像を取得し、赤外線熱画像の全画素についての輝度値の分布を区画するために所定の閾値を設定し、閾値以上の輝度値を1、閾値未満の輝度値を0として、1フレームの赤外線熱画像を2値化し、2値化画像中で、隣接する画素が1であるものの集まりを1群とし、該1群を覆うようなウインドウを設定して、目標の候補を抽出し、設定された各ウインドウ内に含まれる画素について輝度値を積算し、目標候補が放つ熱量相当の輝度を算出し、輝度の積算値がフレーム毎に増加しているウインドウを選択して、目標を抽出し、目標の画素数のフレーム毎の変化と、予め設定する実際の目標サイズである実目標サイズから、相対距離を算出する。
(もっと読む)
レーザレーダ装置及びレーザレーダ法
【課題】三次元レーザレーダ装置及び方法において、海面位置に関わらず、確実に検知対象物を検知可能とする。
【解決手段】鉛直方向に連続して配列される複数の点データからなる連続点データ群のうち高さ距離が海上に発生する波の想定最大値を上限として設定される除外閾値以下の連続点データ群に含まれる点データを除外して検知対象物の検知を行う。
(もっと読む)
距離画像カメラおよびこれを用いた距離測定方法
【課題】箱などの物体の表面反射率が低い場合であっても、その物体までの距離を極力正確に測定することが可能な距離画像カメラおよびこれを用いた距離測定方法を提供する。
【解決手段】認識対象物体へ光を照射する発光部11と、照射された光の反射光が戻ってくるまでの時間の測定値から算出される距離情報を2次元配置された画素P毎に有する距離画像Gdと、前記反射光の受光強度を示す受光レベル情報を画素P毎に有する受光レベル画像Gaとをそれぞれ取得する撮像部12と、これらの制御および演算処理を行う演算制御ユニット13とを備え、この演算制御ユニット13は、受光レベル画像Gaを2値化した2値化受光レベル画像Gbを得る2値化処理部と、2値化受光レベル画像Gbに含まれる1つ以上の同一物体をそれぞれ認識する領域化を行う領域化部と、認識された同一物体毎に対応する各画素Pの距離情報を平均化する距離平均化部とを有する。
(もっと読む)
光測距装置
【課題】受信信号にノイズが載っているときにも対象物までの距離を測定可能な光測距装置を提供する。
【解決手段】接近する対象物に対してレーザパルスを繰り返し送信し対象物からの反射光を受信する信号受信手段と、受信した信号の最大振幅値を所定の閾値と比較する振幅比較手段と、振幅比較手段によりレーザパルス送信前の最大振幅値が閾値より小さいと判断されたときレーザパルスの送信時点と、信号受信手段により受信された受信信号の受信時点から対象物までの距離を計算する距離計算手段と、大きいと判断されたとき、受信信号の周波数特性を検知し、検知された周波数特性に他よりも大きい特定の周波数成分が検知されたとき、この特定の周波数成分を除いた後その出力を受信信号検知手段に入力する特定周波数成分除去手段と、検知されなかったとき、距離計算手段による対象物までの距離計算をせず、閾値より高い最大振幅値に変更する閾値変更手段とを有する。
(もっと読む)
固体撮像装置および携帯情報端末
【課題】複数のマイクロレンズを有していても、補正を容易に行うことが可能で、かつ距離推定や画像再構成における誤差および画質劣化を抑制することのできる固体撮像装置および携帯情報端末を提供する。
【解決手段】本実施形態の固体撮像装置は、被写体を結像面に結像する第1の光学系と、複数画素を含む複数の画素ブロックを有する撮像領域を備えた撮像素子と、前記複数の画素ブロックに対応して設けられた複数のマイクロレンズを有するマイクロレンズアレイを含み、前記結像面に結像される予定の像を、個々のマイクロレンズに対応する画素ブロックに縮小再結像する第2の光学系と、前記撮像素子によって得られた前記被写体の画像信号を用いて、前記各マイクロレンズと前記画素ブロックとの光学位置関係を補正した画像信号処理を行う信号処理部と、を備えている。
(もっと読む)
物体検出ユニット
【課題】外乱光や電気的ノイズによる影響を抑え、物体の検出精度を向上させた物体検出ユニットを提供する。
【解決手段】測距部3は、発光部31と、受光部32とを有する。測距部3は、発光部31を発光させ、受光部32で受光した受光光量に基づき物体を仮検出するとともに、ここで仮検出した物体までの距離を算出する。記憶部5が、物体までの距離の変化に応じて受光部32での受光光量の下限閾値を設定する下限パラメータ、および物体までの距離の変化に応じて受光部32での受光光量の上限閾値を設定する上限パラメータを記憶する。制御部2は、受光部32で受光した受光光量が、測距部3が算出した仮検出した物体までの距離において、下限パラメータで決定される下限閾値と、上限パラメータで決定される上限閾値と、の間に位置していなければ、この仮検出した物体を物体でないと判定する。
(もっと読む)
体積検出装置、及び、体積検出方法
【課題】対象物の位置や姿勢、挙動等によって隠蔽部が生じることがあっても、シート上の対象物の体積を正確に検出することのできる体積検出装置、及び、体積検出方法を提供する。
【解決手段】対象物の距離画像データを距離画像センサ4で取得する。取得した距離画像データをデータ記録手段25に記録する。可視部分から推定される対象物の体積を現在体積算出手段24によって算出する。現在と過去の距離画像データを比較し、対象物の中で距離画像センサ4の位置から隠れている部分の体積を隠蔽体積算出手段26によって検出する。現在体積算出手段24で算出した体積と、隠蔽体積算出手段26で算出した体積と、を基に対象物の体積を算出する。
(もっと読む)
距離計測装置、距離計測方法、およびプログラム
【課題】計測時間の長時間化や特殊な撮像素子を用いることなく、アクティブ型の距離計測装置における輝度ダイナミックレンジを拡大する。
【解決手段】計測対象物に対して投影される計測用のパターン光の輝度値を、当該パターン光の二次元位置ごとに所定の輝度値範囲で変調させる変調部と、変調部により変調されたパターン光を計測対象物に対して投影する投影部と、投影部によりパターン光が投影された計測対象物を撮像する撮像部と、撮像部により撮像された撮像画像に基づいて計測対象物までの距離を算出する距離算出部と、を備える。
(もっと読む)
光学式変位センサ及び該光学式変位センサにおける段差検出方法
【課題】段差候補となる期間を検出してから、ベルトコンベア等の搬送装置の振動等による変位量の変動、時間方向の変位量の変動の影響を低減し、より確実に段差を検出することができる光学式変位センサ及び該光学式変位センサにおける段差検出方法を提供する。
【解決手段】受光器の出力に基づいて検出対象物の変位量を算出し、所定のタイミングでサンプリングする。前回サンプリングした変位量と今回サンプリングした変位量との差分値を算出し、算出した差分値に基づいて段差期間と非段差期間とを判別する。段差期間と判別された期間における差分値の積算値を算出し、段差期間と判別された期間ごとに算出した積算値の最大値と第一の閾値とを比較して段差であるか否かを判別する。
(もっと読む)
近接センサ及び電子機器
【課題】従来の近接センサよりも応答性が向上した近接センサ及び電子機器を提供する。
【解決手段】近接センサ1は、電流信号S3の電流値が第2閾値電流以下になったとき、記憶部21に格納されている状態情報を状態ST1に更新し、状態情報が状態ST1であって、かつ、上記電流値が第2閾値電流を越えたとき、状態情報を状態ST2に更新し、上記電流値が第1閾値電流以上になったとき、状態情報を状態ST3に更新し、状態情報が状態ST3であって、かつ、上記電流値が第1閾値電流を下回ったとき、状態情報を状態ST4に更新する状態更新部22と、状態情報が状態ST1または状態ST4に更新されたとき、被検出対象Bが近接していないことを示す信号S6を外部に出力するとともに、状態情報が状態ST2または状態ST3に更新されたとき、被検出対象Bが近接していることを示す信号S6を外部に出力する制御部5とを備える。
(もっと読む)
車両の制御装置
【課題】路上物の誤検知により、運転者に違和感や煩わしさを感じさせる接触回避処理がなされることを抑制した車両の制御装置を提供する。
【解決手段】物体認識部11により認識された物体と車両1との距離が、判定距離Dth以下になったときに、物体と車両1との接触を回避するための接触回避処理を実行する接触回避制御部17を備えた車両の制御装置であって、車両1の先行車両2の通過軌跡60を認識する先行車両軌跡認識部13と、物体認識部11により認識されたパイロン4が通過軌跡60上にあるか否かを判断する物体位置判断部14と、パイロン4が通過軌跡60上にあるときの判定距離Dthを、パイロンが通過軌跡60上にないときの判定距離よりも短く設定する判定距離設定部15とを備える。
(もっと読む)
ステレオ画像処理装置、ステレオ画像処理方法及びプログラム
【課題】ハードウェアあるいはソフトウェアの規模を削減して遠近距離の距離画像取得と立体物の検出を行えるステレオ画像処理装置を提供する。
【解決手段】ステレオ画像処理装置は、同じ撮像領域を撮像する3台のカメラを有し、カメラ11aとカメラ11cでの撮像画像とのマッチングを行い、所定の単位領域ごとに映像信号の差が最小となる対応領域を求め、対応領域の両画像中における位置のずれ量を遠距離視差Pfとして検出する遠距離用視差検出部21と、カメラ11bとカメラ11cでの撮像画像とのマッチングを行い、所定の単位領域ごとに映像信号の差が最小となる対応領域を求め、対応領域の両画像中における位置のずれ量を第2視差として検出する近距離用視差検出部22と、第1視差と第2視差とを統合する視差統合部31と、統合済みの視差に基づいて、所定の単位領域ごとにその領域に対応する物体までの距離を演算する距離演算部とを備える。
(もっと読む)
距離画像センサ
【課題】距離画像における物体と背景との境界における誤検知の発生を防止した距離画像センサを提供する。
【解決手段】画像生成部10は、強度を変調した変調光を対象空間に投光しその反射光を受光して対象空間の同物体について濃淡画像と距離画像とを生成する。フィルタ処理部20は、距離画像において、濃淡画像の光量が所定の閾値以下の画素に規定値を付与し、さらに規定値の画素に隣接する規定値以外の画素の画素値を、物体または背景の画素値に置換する。
(もっと読む)
測定装置
【課題】ラインセンサにより高さのみ及び高さと変位の両方を高精度に測定することができ、設置作業が容易な測定装置を提供する。
【解決手段】測定装置において、5つ以上の高さ方向の絶対座標が分かるキャリブレーションターゲット2と、前記キャリブレーションターゲット2の画像を撮像し、撮像した画像の画像信号を出力するラインセンサ1と、前記画像信号に基づき画像情報を作成する入力画像作成部と、前記画像情報に基づきターゲット座標を検出するターゲット検出部と、前記ターゲット座標及び予め取得した絶対座標に基づきDLT法の係数を算出する係数算出部と、前記係数に基づき前記ラインセンサ1の姿勢を計算する姿勢計算部と、前記係数に基づき前記ラインセンサ1の焦点距離を計算する焦点距離計算部と、前記係数に基づき前記ラインセンサ1の位置を計算する位置計算部とを備えた。
(もっと読む)
信号処理装置、及び走査式測距装置
【課題】走査式測距装置による測定情報を利用して、測定光の伝播方向と交差する方向に移動する移動体の速度を正確に算出することができる信号処理装置を提供する。
【解決手段】信号処理装置は、測定対象空間に向けて所定の走査周期Tで測定光を走査する走査式測距装置1から入力される単位走査毎の測定情報を記憶する記憶部と、記憶部に記憶された過去と現在の単位走査毎の測定情報を走査方向に相対的にシフトさせたときに、双方の測定情報の一致度が最大となるシフト量Sと走査周期とTから移動体の速度を算出する速度演算部と、速度演算部で算出された速度に基づいて前記移動体の状態情報を出力する出力部と、を備えている。
(もっと読む)
送受信信号相関検出装置及び距離測定装置
【課題】カットオフ周波数を適切に設定して、受信信号の2値化の際のコード認識率の低下を抑制して、高い相関値のピークを得る。
【解決手段】PNコード発生回路22で発生したPNコードに応じてレーザ光源26を駆動して光パルスを射出し、目標対象物で反射した反射光パルスをフォトダイオード32で受光して受信信号を出力する。バンドパスフィルタ34を通過した受信信号はマイナス方向へシフトされ、エンコーダ36で2値化され、信号処理部40で、相関値がピークとなるPNコードと受信信号との位相差に基づいて、目標対象物までの距離を算出する。バンドパスフィルタ34のローカットオフ周波数の下限を、受信信号が定常状態となるまでの時間が受信信号の1周期より小さくなる周波数とし、上限を、受信信号のピーク値からパルスひずみの相対量を減算した値が、エンコーダ36の閾値と雑音成分の信号レベルとの和より大きくなる周波数とする。
(もっと読む)
ステレオカメラの診断方法、およびステレオカメラの診断装置
【課題】この発明は、車載のステレオカメラの位置ずれについて、処理を単純化し、低い計算コストで、一般的な運転環境下で自動的に異常を検知できるステレオカメラの診断方法、およびステレオカメラの診断装置を実現することを目的とする。
【解決手段】この発明は、ステレオ画像を取得するステレオカメラの診断方法において、カメラ画像から特徴物を検出し、光軸中心を基準として実際に検出された特徴物の検出位置と本来検出されるべき位置との垂直方向のずれに基づいてカメラの角度ずれを検出することを特徴とする。
(もっと読む)
画像処理装置、画像処理方法、プログラム、及び電子機器
【課題】ユーザを撮像して得られる撮像画像に基づいて、ユーザまでの距離を精度良く検出する。
【解決手段】LED21aは、被写体に対して第1の波長の光を照射し、LED21bは、被写体に対して第1の波長とは異なる第2の波長の光を照射し、カメラ22は、第1の波長の光が照射されている被写体を撮像して第1の撮像画像を生成し、第2の波長の光が照射されている被写体を撮像して第2の撮像画像を生成し、2値化部43は、第1及び第2の撮像画像に基づいて、被写体の肌領域を検出し、座標検出部44は、第1及び第2の撮像画像上の肌領域における、対応する画素の輝度値どうしの差分絶対値に基づいて、被写体までの距離を算出する。本発明は、例えば、ユーザを撮像して得られる撮像画像から、ユーザまでの距離を算出するコンピュータ等に適用できる。
(もっと読む)
撮像装置
【課題】撮像素子により撮像された遮光壁の輝度情報に基づいて、各レンズの位置を計算することで温度変化による影響を取り除いて、環境変動に強い撮像装置を提供する。
【解決手段】この撮像装置50は、被写体(図示せず)に対向する位置に配設され、複数のレンズ1a、1bをアレイ状に配列したレンズアレイ1と、レンズアレイ1の像面側に設けられ、複数のレンズにより結像された被写体の縮小像(以下、個眼像と呼ぶ)の集合である複眼像を撮像するCMOSセンサ(撮像素子)4と、CMOSセンサ4により撮像された複眼像を処理する演算器10と、レンズアレイ1を構成する隣接する各レンズ間での光線のクロストークを防止する遮光壁2と、を備えて構成されている。
(もっと読む)
1 - 20 / 78
[ Back to top ]