
Fターム[2F112FA09]の内容
光学的距離測定 (16,745) | データ処理回路 (4,598) | A/D変換(多値化) (462) | 2値化 (135) | しきい値の決定、変更 (57)
Fターム[2F112FA09]に分類される特許
1 - 20 / 57
測距方法及び到達時間算出方法
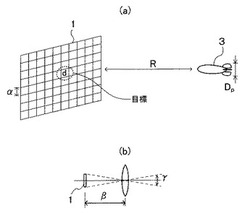
【課題】赤外線カメラによる測距方法を提供する。
【解決手段】赤外線カメラで、目標を含む移動物体の赤外線像を光学的に走査して赤外線熱画像を取得し、赤外線熱画像の全画素についての輝度値の分布を区画するために所定の閾値を設定し、閾値以上の輝度値を1、閾値未満の輝度値を0として、1フレームの赤外線熱画像を2値化し、2値化画像中で、隣接する画素が1であるものの集まりを1群とし、該1群を覆うようなウインドウを設定して、目標の候補を抽出し、設定された各ウインドウ内に含まれる画素について輝度値を積算し、目標候補が放つ熱量相当の輝度を算出し、輝度の積算値がフレーム毎に増加しているウインドウを選択して、目標を抽出し、目標の画素数のフレーム毎の変化と、予め設定する実際の目標サイズである実目標サイズから、相対距離を算出する。
(もっと読む)
光測距装置

【課題】受信信号にノイズが載っているときにも対象物までの距離を測定可能な光測距装置を提供する。
【解決手段】接近する対象物に対してレーザパルスを繰り返し送信し対象物からの反射光を受信する信号受信手段と、受信した信号の最大振幅値を所定の閾値と比較する振幅比較手段と、振幅比較手段によりレーザパルス送信前の最大振幅値が閾値より小さいと判断されたときレーザパルスの送信時点と、信号受信手段により受信された受信信号の受信時点から対象物までの距離を計算する距離計算手段と、大きいと判断されたとき、受信信号の周波数特性を検知し、検知された周波数特性に他よりも大きい特定の周波数成分が検知されたとき、この特定の周波数成分を除いた後その出力を受信信号検知手段に入力する特定周波数成分除去手段と、検知されなかったとき、距離計算手段による対象物までの距離計算をせず、閾値より高い最大振幅値に変更する閾値変更手段とを有する。
(もっと読む)
カメラ校正方法
【課題】ステレオ法を用いた三次元測定に適したカメラ校正を行い、三次元位置の測定における測定精度を向上させることができるカメラ校正方法を提供すること。
【解決手段】複数の特徴点が設けられ、各特徴点の相対位置が既知である校正器を撮像する(S2)。撮像した校正器の画像情報から校正器の特徴点を抽出する(S3)。2つのカメラそれぞれのカメラパラメータの初期値を算出する(S4)。算出したカメラパラメータを用いて、2つ以上の特徴点の三次元位置座標を算出する(S5)。三次元位置座標を算出した各特徴点のうち、2つの特徴点間の距離を算出する(S6)。算出した距離と実際の距離との誤差を算出する(S7)。算出した誤差を用いてカメラパラメータの修正量を算出する(S8)。算出した修正量の分、カメラパラメータを修正して更新する(S9)。
(もっと読む)
物体検出ユニット
【課題】外乱光や電気的ノイズによる影響を抑え、物体の検出精度を向上させた物体検出ユニットを提供する。
【解決手段】測距部3は、発光部31と、受光部32とを有する。測距部3は、発光部31を発光させ、受光部32で受光した受光光量に基づき物体を仮検出するとともに、ここで仮検出した物体までの距離を算出する。記憶部5が、物体までの距離の変化に応じて受光部32での受光光量の下限閾値を設定する下限パラメータ、および物体までの距離の変化に応じて受光部32での受光光量の上限閾値を設定する上限パラメータを記憶する。制御部2は、受光部32で受光した受光光量が、測距部3が算出した仮検出した物体までの距離において、下限パラメータで決定される下限閾値と、上限パラメータで決定される上限閾値と、の間に位置していなければ、この仮検出した物体を物体でないと判定する。
(もっと読む)
測距装置
【課題】簡素な構造で複雑な付加演算を必要とせず、高速応答可能で、かつ、スポット欠けによる誤測距を回避できる測距装置を提供する。
【解決手段】距離算出部20は、光スポットプロファイル算出部11から出力されたプロファイルに基づいて、受光素子4上の光スポットの位置を求め、この光スポットの位置に基づいて、受光素子4から測距対象物5までの距離を算出する。エラー検出部21は、光スポットプロファイル算出部11から出力されたプロファイルに基づいて、光スポットの形状を数値化し、この数値化された数値と予め定められた閾値とを比較して、この数値が予め定められた条件に従わないと、エラー信号を出力する。
(もっと読む)
光学式変位センサ及び該光学式変位センサにおける段差検出方法
【課題】段差候補となる期間を検出してから、ベルトコンベア等の搬送装置の振動等による変位量の変動、時間方向の変位量の変動の影響を低減し、より確実に段差を検出することができる光学式変位センサ及び該光学式変位センサにおける段差検出方法を提供する。
【解決手段】受光器の出力に基づいて検出対象物の変位量を算出し、所定のタイミングでサンプリングする。前回サンプリングした変位量と今回サンプリングした変位量との差分値を算出し、算出した差分値に基づいて段差期間と非段差期間とを判別する。段差期間と判別された期間における差分値の積算値を算出し、段差期間と判別された期間ごとに算出した積算値の最大値と第一の閾値とを比較して段差であるか否かを判別する。
(もっと読む)
距離測定装置および距離測定プログラム
【課題】物体により反射される反射光に基づいて物体までの距離を測定する距離測定装置において、ダイナミックレンジの広い受光素子を備えることなく反射率の異なる各物体を良好に検出できるようにする。
【解決手段】運転支援システム1において受光部15は、光波を射出する発光部14からの光波が物体に反射されることにより得られる反射光を受光し、この光量に応じて出力をし、レーダ制御部11は、各受光部15による出力に基づいて光波を反射した物体までの距離を演算する。さらに受光部15は、異なる感度を有する複数の受光部15a〜15cを備えている。よって、ダイナミックレンジが広い受光部を利用した場合と同様に、受光部15によって検出可能な反射光の光量の範囲を拡大することができる。よって、ダイナミックレンジが広い受光部を備えることなく反射率の異なる各物体を良好に検出することができる。
(もっと読む)
車両の制御装置
【課題】路上物の誤検知により、運転者に違和感や煩わしさを感じさせる接触回避処理がなされることを抑制した車両の制御装置を提供する。
【解決手段】物体認識部11により認識された物体と車両1との距離が、判定距離Dth以下になったときに、物体と車両1との接触を回避するための接触回避処理を実行する接触回避制御部17を備えた車両の制御装置であって、車両1の先行車両2の通過軌跡60を認識する先行車両軌跡認識部13と、物体認識部11により認識されたパイロン4が通過軌跡60上にあるか否かを判断する物体位置判断部14と、パイロン4が通過軌跡60上にあるときの判定距離Dthを、パイロンが通過軌跡60上にないときの判定距離よりも短く設定する判定距離設定部15とを備える。
(もっと読む)
光位相差検出式の物体検知センサ
【課題】
電気回路の温度ドリフト等による距離測定値が変動を補正し、数センチ単位の距離変動を検出することのできる光位相差検出式の物体検知センサを提供すること。
【解決手段】
検知領域に向けて検出光を投光する投光素子と、検知領域からの反射光を受光して受光信号を生成する受光素子と、投光した光と、受光した光との位相差を検出し距離計算をおこなう距離算出手段と、検知領域内に物体が有ると判定する判定手段を備えた光位相差検出式の物体検知センサに、距離算出手段の状態を監視し続け、判定手段からの出力が存在していない時にのみ、距離算出結果に基づき判定手段の判定値を補正する状態補正手段を加え、自動的に背景(床面等)までの距離測定結果の補正、もしくは、検出閾値の補正を実行させるようにした。
(もっと読む)
共焦点顕微鏡装置
【課題】本発明では、正確に測定対象平面を検出すると共に、測定時間の短縮が可能な共焦点顕微鏡装置を提供することを目的とする。
【解決手段】観察試料8の観察面に光を集束する少なくとも1つの対物レンズ7と、観察試料8と対物レンズ7との距離を所定間隔で変化させるZレボルバ16と、観察試料8と対物レンズ7との距離に応じて所定間隔を設定する測定条件情報指示部19と、設定された所定間隔で上記距離を変化させるようにZレボルバ16を駆動制御するZ駆動制御部22と、観察面からの反射光を検出する光検出器12と、上記所定間隔の距離毎に観察面上に光を二次元走査して光検出器12で検出される検出信号により平面画像を生成し、生成された複数の平面画像を用いて三次元画像を生成するコントローラ2を有する共焦点顕微鏡装置100により、上記課題の解決を図る。
(もっと読む)
測距装置及び撮像装置
【課題】視差算出にかかる処理時間を考慮して視差算出に用いる画素を適切に選択する。
【解決手段】対象物までの距離を測定する測距装置であって、2つの撮像手段と、2つの撮像手段のうち一方の撮像手段により撮像された画像に対し、視差算出の対象画像のサイズに応じて、視差算出画素を選択するための複数の処理から1つを決定する決定手段と、決定手段により決定された処理に基づき、対象画像から視差算出画素を選択する選択手段と、選択手段により選択された視差算出画素と、他の撮像手段により撮像された画像のうち、選択された視差算出画素に対応する画素とを用いて視差データを算出する算出手段と、を備える。
(もっと読む)
測距装置及び撮像装置
【課題】視差算出にかかる処理時間を高速化すること。
【解決手段】対象物までの距離を測定する測距装置であって、2つの撮像手段と、2つの撮像手段により撮像されたそれぞれの画像を複数の小画像に分割する分割手段と、2つの撮像手段のうち一方の撮像手段により撮像された画像の小画像に対し、視差算出画素を選択するためのテクスチャ検出処理、選択された視差算出画素と、他の撮像手段により撮像された画像のうち、選択された視差算出画素に対応する画素とを用いて視差データを算出する視差算出処理を少なくとも行う視差算出手段と、視差算出手段によるテクスチャ検出処理、視差算出処理を小画像毎に並列して処理するよう制御する制御手段と、を備える。
(もっと読む)
測定装置、位置測定システム、測定方法、較正方法及びプログラム
【課題】光を用いて物体までの距離を測定した測定結果において、所定の対象物に関する測定結果を特定することを可能とすること。
【解決手段】物体までの距離を光の照射によって測定点毎に測定する測定装置であって、測定点毎の距離を表す距離情報と、測定点毎の受光量を表す受光量情報と、を取得する光学式距離測定部と、受光量情報において、光量が閾値を超える測定点を、光源方向に対して多くの入射光を反射する反射面を有する対象物に対応する測定点であると判定する対象判定部と、対象判定部によって判定された測定点の距離に基づいて、自装置の基準点を原点とするローカル座標系における対象物の位置を算出し、当該ローカル座標系における位置と、同一の対象物のグローバル座標系における位置とに基づいて、較正を行う較正ステップと、を備える。
(もっと読む)
距離センサ
【課題】距離センサにおいて、簡単な構成により、処理する信号の周波数帯域を抑えることによる低コスト化と測定精度の向上または維持を図る。
【解決手段】距離センサ1は、第1、第2の周波数の信号を生成する第1、第2のシンセサイザ11,12と、第1の周波数の信号を第2の周波数でサンプリングしてスタート信号を出力するサンプルホールド回路3と、第1の周波数でパルス化した信号波を送信する投光器4と、反射して戻ってくる信号波を受信して受信信号を出力する受光器5と、受信信号を第2の周波数でサンプルホールドした信号に基づいてストップ信号を生成して出力する比較判断回路6と、スタート信号の出力からストップ信号の出力までの経過時間に基づいて対象物Mまでの距離を演算する計数演算器7とを備える。比較判断回路6は、等価サンプリングとサンプルホールドとにより、システムの低速動作が可能とされる。
(もっと読む)
レーザレーダ装置
【課題】検出物体の検出精度を高め得るレーザレーダ装置を提供する。
【解決手段】フォトダイオード20により検出時間Tが所定の時間範囲ΔT内にあるとして検出される反射光のうち、その光量に対応する受光信号の振幅Aが、異物反射光量Lsより低く設定された異物検出閾値Ad以上であり異物反射光量Lsより高く設定された近点検出閾値An未満である反射光を無効とし、当該振幅Aが近点検出閾値An以上である反射光の検出時間Tに基づいて検出物体までの距離が測定される。
(もっと読む)
変位センサ
【課題】高速、且つ高精度に受光中心位置を検出可能な変位センサを提供する。
【解決手段】変位センサ10は、受光信号を順次読み込み、受光信号を時間で二次微分して二次微分信号を生成し、その二次微分信号が正値から負値に変化するゼロクロス点における画素の受光信号レベルをしきい値に設定し、そのしきい値以上の画素範囲を演算範囲に設定する制御部16を備える。この制御部16は、上記設定した演算範囲にて重心演算を行って受光波形の重心位置を算出し、その重心位置を受光中心位置として検出する。
(もっと読む)
動体判別機能付き電子機器
【課題】 動体を正確に判別することができるコンパクトな電子機器を提供する。
【解決手段】 動体しきい値記憶手段104の動体しきい値を、測定対象物までの距離が遠い場合には大きく、測定対象物までの距離が近い場合には小さくなるように、測定距離範囲毎に予め設定する。動体判定手段106は、測距値の最大値と最小値の差が所定の動体しきい値よりも大きい場合に測定対象物が動体であると判定する。
(もっと読む)
距離計測装置とその距離計測装置に用いられる受光装置
【課題】 対象物までの距離を正確に計測することができる距離測定装置、及びその距離測定装置で用いられる受光装置を提供する。
【解決手段】 距離計測装置10は、照射部4と受光装置50を備える。照射部4は、対象物30に向けて照射光20を照射する。受光装置50は、受光部60と演算部70を備える。受光部60は、対象物30で反射した反射光40を受光して電気信号に変換する。演算部70は、照射光20と反射光40に基づいて対象物30までの距離を演算する。演算部70は、計時器2と光量測定器12と距離データ計算器16を備える。計時器2は、照射された照射光20が対象物30で反射して受光部60に至るまでの時間を計測する。光量測定器12は、反射光40の光量を測定する。距離データ計算器16は、計時器2で計測された時間と光量測定器12で測定された光量を利用して、対象物30までの距離データを出力する。
(もっと読む)
物体検出装置
【課題】距離検出手段が検出した距離データを的確にグループ化して物体を的確に検出することが可能な物体検出装置を提供する。
【解決手段】物体検出装置1は、距離検出手段6の検出領域の区分dnごとに得られた距離データdpnをグループ化して物体を検出する物体検出手段11と、撮像された画像T上で隣接する複数の画素pを各画像データDに基づいて画素領域gに統合する統合処理手段10と、画像Tを距離検出手段6と同様に区分し、画像T中に占める物体の範囲内に存在する画素領域gの画像データに基づいて、範囲に属する区分dnごとに一つ以上の代表画像データDnを割り当てる割り当て手段12と、区分dnごとの代表画像データDnに基づいて距離データdpnのグループ化の閾値ΔXth、ΔZthを可変させる閾値可変手段13と、可変された閾値に基づいて再度距離データdpnをグループ化して物体の検出を行う再検出手段14とを備える。
(もっと読む)
距離測定方法および装置
【課題】2つの撮像手段を用いる距離測定方法において、距離情報に大きな誤差が発生することを防止する。
【解決手段】所定の基線長を間に置いて配置した2つの撮像手段によって被写体を撮影し、この撮影で得られた2つの画像間の各対応点に関する視差量に基づいて該対応点の距離情報を求める距離測定方法において、前記基線長を任意の値として第1回目の撮影を行った後、撮像手段の画素ピッチをL、mを任意の自然数、nを2以上の整数として、基線長をそれぞれL{m+1/n}、L{m+2/n}・・・L{m+(n−1)/n}だけ変更して合計n回の撮影を行い、n回の撮影毎に視差量演算部23で演算して得られた視差量のうち、各回の撮影を通じて共通の所定範囲にある視差量のみを記録判定部25で抽出し、それらの抽出された視差量に基づいて距離情報を求める
(もっと読む)
1 - 20 / 57
[ Back to top ]