
Fターム[2F112FA32]の内容
光学的距離測定 (16,745) | データ処理回路 (4,598) | 信号補正(輪郭強調) (190) | フィルタリング (92)
Fターム[2F112FA32]に分類される特許
1 - 20 / 92
ステレオ3次元計測装置
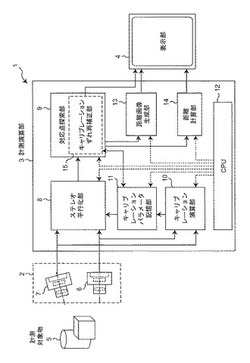
【課題】回路規模および演算時間の増大を招くことなくキャリブレーションずれを再補正する。
【解決手段】キャリブレーションによって補正された左右のカメラステレオ平行化後画像間のずれ量を、キャリブレーションずれ再補正部15を含む対応点探索部9による対応点の探索処理中において、キャリブレーションずれ再補正部15によるキャリブレーションずれ再補正処理で得られるデータを用いて再補正する。こうして、距離計測装置1における内部ハードウェアの回路規模および演算時間を増大させることなく計測精度を高めることができる。また、上記右カメラステレオ平行化後画像を上下にずらして、左右のカメラステレオ平行化後画像の上下方向のずれを再補正する。こうして、問題になり易い上下方向のキャリブレーションずれを低減することができる。その際に、対応点の探索を行う際の右カメラステレオ平行化後画像の最適位置を確実に見出すことができる。
(もっと読む)
画像処理装置および画像処理方法、プログラム

【課題】多眼方式の撮像装置で取得された画像群から、主被写体と背景を含む距離画像を提供する。
【解決手段】本発明に係る画像処理装置は、合焦位置が異なる複数の光学系を有する多眼方式の撮像装置によって撮像された複数の画像を取得する画像取得部(401)と、撮像装置によって撮像された複数の画像それぞれについて合焦画像となる領域を選択する合焦画像選択部(404)と、合焦画像選択部で選択された複数の合焦画像を使用して距離を算出する距離算出部(405)と、を備えたことを特徴とする。
(もっと読む)
距離計測装置及び距離計測方法
【課題】計測密度の低下を防止して高密度な距離計測を実現することのできる距離計測装置を提供する。
【解決手段】本発明の距離計測装置1は、複数のドットを配置した投光パターンを照射する投光部2と、投光パターンが計測対象物で反射された光を撮像する撮像部3と、所定の距離範囲内に計測対象物が存在した場合に投光パターンのドットの撮像位置がエピポーラ線方向に移動する移動軌跡を示した距離別計測パターンと撮像部3による撮像画像とを比較することにより、計測対象物が存在する距離範囲を特定する距離範囲特定部6と、距離別計測パターンの移動軌跡上における撮像画像のドット位置に基づいて計測対象物の位置を特定する位置特定部7と、位置特定部7で特定された計測対象物の位置に基づいて計測対象物までの距離を算出する距離算出部8とを備えることを特徴とする。
(もっと読む)
測距装置
【課題】単一の車載カメラによる撮像画像を利用する安価なシステム構成で、該車載カメラにより撮像される対象物と自車両と対象物との間の距離を高い信頼性で行なうことができる測距装置を提供する。
【解決手段】撮像画像から抽出された対象物53の撮像画像中でのサイズと標準サイズ値との比率を基に、第1距離推定値D1を決定する。また、自車両1からの距離が対象物53の接地点P53と同じになる静止点Pを撮像画像に投影してなる特徴点を抽出し、少なくともその特徴点の位置に基づいて第2距離推定値D2を決定する。第2距離推定値D2が所定の許容範囲に収まっているか否かを判断し、その判断結果に応じて、第1距離推定値D1と第2距離推定値D2とのうちの一方を対象物53の自車両1からの距離の推定値として確定する。
(もっと読む)
測距装置
【課題】対象物が存在する路面の勾配の影響を適切に補償しつつ、車載カメラによる撮像画像を用いて対象物と自車両との間の距離を精度よく測定することができる測距装置を提供する。
【解決手段】互いに異なる撮像時刻での車載カメラ2の2つの撮像画像から、自車両1からの距離が第1撮像画像の撮像時刻での対象物53の接地点P53と同じになる静止点Pの投影点となる特徴点を抽出する。計測したカメラ運動パラメータと、各撮像画像の特徴点の位置と、車載カメラ2の高さHcの値とから、車載カメラ2の下方に位置する路面51上の点から対象物存在路面52上の静止点に至る直線L2が車載カメラ2の光軸Lcに対してなす角度θを所定の演算式に基づいて推定する。角度θの推定値を用いて対象物53と自車両1との間の距離Dを推定する。
(もっと読む)
車両周辺監視装置
【課題】車両周辺監視装置において、実寸と相関性の高いテンプレートサイズを設定することができ、その結果、良好な画像処理結果を得ることができ、また、不必要に大きいテンプレートサイズを設定することがないため、計算量の増加を防ぐことにある。
【解決手段】制御手段(4)は、各実空間座標位置に予め設定された3次元寸法の仮想ブロックを想定し、この仮想ブロックが画像上に表示されるサイズを記憶する記憶手段(6)と、この記憶手段(6)に記憶された表示サイズから一つの画素の周辺画素を一群のデータとして画像処理を行うためのテンプレートサイズを設定するテンプレートサイズ設定手段(7)と、このテンプレートサイズ設定手段(7)により設定されたテンプレートサイズを用いて撮像手段(3)により撮像された画像を処理する画像処理手段(8)とを備える。
(もっと読む)
人体検知センサ及び自動水栓
【課題】誤検知を抑制して検知性能を高めた人体検知センサを提供すること。
【解決手段】発光部25が投射する光に応じて生じた反射光を撮像部26で受光して被検知対象を検知する人体検知センサ1は、受光エリア内の反射光の重心位置を特定する重心特定手段322と、重心位置が検知エリアに属しているか否かを判定する第1の判定手段323Aと、重心画素の画素値に関する閾値処理の結果に応じて重心画素の受光度合いの適否を判定する第2の判定手段323Bと、第1及び第2の判定手段323A・Bがいずれも肯定的な判定を行ったときに被検知対象を検知した旨を表す検知信号を出力する検知出力手段324と、を備えている。
(もっと読む)
光測距装置
【課題】受信信号にノイズが載っているときにも対象物までの距離を測定可能な光測距装置を提供する。
【解決手段】接近する対象物に対してレーザパルスを繰り返し送信し対象物からの反射光を受信する信号受信手段と、受信した信号の最大振幅値を所定の閾値と比較する振幅比較手段と、振幅比較手段によりレーザパルス送信前の最大振幅値が閾値より小さいと判断されたときレーザパルスの送信時点と、信号受信手段により受信された受信信号の受信時点から対象物までの距離を計算する距離計算手段と、大きいと判断されたとき、受信信号の周波数特性を検知し、検知された周波数特性に他よりも大きい特定の周波数成分が検知されたとき、この特定の周波数成分を除いた後その出力を受信信号検知手段に入力する特定周波数成分除去手段と、検知されなかったとき、距離計算手段による対象物までの距離計算をせず、閾値より高い最大振幅値に変更する閾値変更手段とを有する。
(もっと読む)
物体検出装置及び物体検出方法
【課題】誤結合検出を防止することにより、物体検出精度を向上させることができる、物体検出装置及び物体検出方法を提供すること。
【解決手段】物体検出装置200において、検出物体領域補正部103が、基準画像平面内の座標群と、レーダによって検出された、各座標における検出移動速度とが対応付けられた移動速度マップ情報に基づいて、検出物体領域設定部102によって設定された検出物体領域を補正する。こうすることで、検出物体領域が誤結合の結果として得られたものであっても、その検出物体領域を移動速度マップ情報を用いて修正することができる。この結果、物体検出精度を向上させることができる。
(もっと読む)
ステレオカメラの校正装置および校正方法
【課題】ステレオカメラの校正装置および校正方法を提供すること。
【解決手段】ステレオカメラの校正装置300は、第1カメラ320と、第2カメラ318と、カメラステー140とを含んでおり、コリメータユニット302がステレオカメラから距離を隔てて配置されたテストチャート306が無限遠位置に配置されたと等価な光路を形成させている。視差算出部362は、ステレオカメラが撮影した左右画像からテストチャート306とステレオカメラとの間の異なる光学的距離に相当する視差データを計算し、パラメータ算出部364が、視差算出部362が計算した視差データおよびテストチャートまでの実距離データを使用してステレオカメラの測距パラメータである視差オフセットbおよび距離換算パラメータaを算出している。
(もっと読む)
光波距離計
【課題】フィルタ位置設定時間が長引くことなく、測距時間も短縮できる光波距離計の提供。
【解決手段】測距光路23間に受光光量調節用の可変濃度フィルタ25が配置された位相差方式の光波距離計において、測定ごとに測距値、可変濃度フィルタ25のフィルタ位置、測距信号の信号棄却率を記憶手段51に記憶しておき、測定時には演算処理部50で、測距信号のサンプリングから算出したサンプル測距値と記憶手段51内の測距値とを比較して、差異が1m以下であるときは、その中で最も閉じられたフィルタ位置に可変濃度フィルタ25を設定し、さらに該フィルタ位置での信号棄却率が0%ならそのフィルタ位置のまま、棄却率が0%でないときはそのフィルタ位置よりも若干濃度を濃くして測距を開始するフィルタ位置調節手段を設けた。
フィルタ位置調節は数回で済み、最適なフィルタ位置に決まるので信号棄却率が下がり測距回数を減らせるため、結果的に測距時間が短縮できる。
(もっと読む)
距離画像センサ
【課題】距離画像における物体と背景との境界における誤検知の発生を防止した距離画像センサを提供する。
【解決手段】画像生成部10は、強度を変調した変調光を対象空間に投光しその反射光を受光して対象空間の同物体について濃淡画像と距離画像とを生成する。フィルタ処理部20は、距離画像において、濃淡画像の光量が所定の閾値以下の画素に規定値を付与し、さらに規定値の画素に隣接する規定値以外の画素の画素値を、物体または背景の画素値に置換する。
(もっと読む)
情報処理装置、情報処理方法、プログラム、及び電子装置
【課題】情報処理装置とユーザとの距離に拘らず、違和感なく情報処理装置を操作できるようにする。
【解決手段】肌領域検出部61は、画像上からユーザの肌を表す肌領域を検出し、特徴点抽出部62は、肌領域の特徴点を抽出し、距離算出部63は、肌領域に基づいて、ユーザまでの距離を算出し、座標変換部46は、距離に応じて、特徴点を所定の座標空間上の座標点に変換するための変換係数を決定し、決定した変換係数に基づいて、特徴点を所定の座標空間上の座標点に変換する。本発明は、例えば、撮像された画像から、ユーザの肌領域を検出する検出装置に適用できる。
(もっと読む)
三次元及び色彩検出における電荷管理のための方法及び装置
【課題】距離計、画像マッピング、三次元画像キャプチャ、及び人間の色感覚によって限定されない色感覚での画像のキャプチャを含み得る三次元応用例に適したCMOS実装可能な画像センサ、及び、そのような検出器の検出特性を改善する。
【解決手段】オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。
(もっと読む)
距離センサ
【課題】位相方式の距離センサにおける適切な距離レンジへの切り替えを実現すること。また、適切な距離レンジの検出を可能とすること。更に、送信波と反射波との位相差の正確な検出を可能とすること。
【解決手段】距離センサ100は、送信信号VTを「参照信号」とし、受信信号VRを「計測信号」とする2位相ロックインアンプ20を有して構成され、この2位相ロックインアンプ20によって、送信信号VTと受信信号VRとの位相差φが算出される。そして、距離計測を行う際には、先ず、分周器4の分周比Nを最大値Nmaxに設定し、このときに算出した測定距離Lxに応じて分周器4の分周比Nを最適な分周比Nに変更した後、再度、測定距離を算出する。
(もっと読む)
距離センサ及び制御方法
【課題】位相方式の距離センサにおいて、測定対象物までの実際の距離に応じた適切な距離レンジの切り替えの実現。
【解決手段】距離センサ100は、発振器2が生成した基準クロック信号F1を1/N分周する分周器4の分周比Nと、PLL8が生成した参照クロック信号F2を1/N分周する分周器10の分周比Nとを可変として構成される。そして、距離計測を行う際には、先ず、分周器4,10それぞれの分周比Nを最大値Nmaxに設定し、このときに算出した測定距離Lxに応じて分周器4,10それぞれの分周比Nを最適な分周比Nに変更した後、再度、測定距離を算出する。
(もっと読む)
距離センサ
【課題】距離センサにおいて、簡単な構成により、処理する信号の周波数帯域を抑えることによる低コスト化と測定精度の向上または維持を図る。
【解決手段】距離センサ1は、第1、第2の周波数の信号を生成する第1、第2のシンセサイザ11,12と、第1の周波数の信号を第2の周波数でサンプリングしてスタート信号を出力するサンプルホールド回路3と、第1の周波数でパルス化した信号波を送信する投光器4と、反射して戻ってくる信号波を受信して受信信号を出力する受光器5と、受信信号を第2の周波数でサンプルホールドした信号に基づいてストップ信号を生成して出力する比較判断回路6と、スタート信号の出力からストップ信号の出力までの経過時間に基づいて対象物Mまでの距離を演算する計数演算器7とを備える。比較判断回路6は、等価サンプリングとサンプルホールドとにより、システムの低速動作が可能とされる。
(もっと読む)
焦点検出装置およびその制御方法
【課題】 検出部を互いに位相がずれて並列に隣接している複数列のラインセンサとした位相差AF制御において、ラインセンサ間の像信号の類似性で像信号の合成を判別することが困難な場合がある。
【解決手段】 本発明では、互いに位相がずれて並列に隣接しているラインセンサが、同一の被写体光を受光していると判断される場合に、ラインセンサからの像信号を合成した後に像ずれ量を検出する。
(もっと読む)
送受信信号相関検出装置及び距離測定装置
【課題】カットオフ周波数を適切に設定して、受信信号の2値化の際のコード認識率の低下を抑制して、高い相関値のピークを得る。
【解決手段】PNコード発生回路22で発生したPNコードに応じてレーザ光源26を駆動して光パルスを射出し、目標対象物で反射した反射光パルスをフォトダイオード32で受光して受信信号を出力する。バンドパスフィルタ34を通過した受信信号はマイナス方向へシフトされ、エンコーダ36で2値化され、信号処理部40で、相関値がピークとなるPNコードと受信信号との位相差に基づいて、目標対象物までの距離を算出する。バンドパスフィルタ34のローカットオフ周波数の下限を、受信信号が定常状態となるまでの時間が受信信号の1周期より小さくなる周波数とし、上限を、受信信号のピーク値からパルスひずみの相対量を減算した値が、エンコーダ36の閾値と雑音成分の信号レベルとの和より大きくなる周波数とする。
(もっと読む)
撮像装置及び距離測定装置
【課題】低コストでmm単位の超近距離から100m超の遠方測距までの距離測定を高精度に実現することができ、距離測定を効率的に行える撮像装置を実現する。
【解決手段】本発明の撮像装置10は、同一平面上に配置された複数のレンズを有するレンズアレイ2−1〜2−4を利用して構成した複眼カメラ1−1〜1−4を複数台、1台の筐体5に搭載し、それら複数台の複眼カメラ1−1〜1−4によって撮像された画像を利用して測距することができることを特徴とする。すなわち本発明の撮像装置10では、同一平面上に配置された複数のレンズを有するレンズアレイを利用して1台のセンサでmm単位を測距することができる複眼カメラを用い、この複眼カメラを一定の距離を置いて複数台、1つの筺体内に設置することでm単位の測距を実現するステレオカメラを構成することにより、超近傍から遠方までを1台の撮像装置10で測距することができる。
(もっと読む)
1 - 20 / 92
[ Back to top ]