
Fターム[2F129BB25]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 角速度センサ (5,830) | ピッチ (163)
Fターム[2F129BB25]に分類される特許
161 - 163 / 163
水中の物体の位置をリアルタイムで決定するための方法および装置
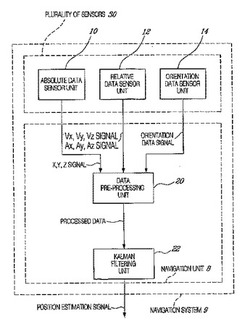
様々なサンプリングレートで動作する多数のセンサを使用して水中の物体の位置決定をリアルタイムで達成するため、および中でも特に、検査業務を実行するために、決定された位置をリアルタイムで使用するための方法および装置が開示される。 (もっと読む)
慣性システム用の入力された位置合わせデータを使用する慣性GPSナビゲーションシステム
慣性(「INS」)/GPS受信機は、それが、始動中に動いているときには、入力された位置合わせデータを使用してINSサブシステムの位置合わせを決定する。位置合わせデータは、パラメータ化された表面情報、測定されたGPS速度、及び、受信機が搭載されている乗物と、慣性測定ユニット(「IMU」)の加速度計及びジャイロスコープに関連する慣性測定基準、または、ボディ、フレームとの間の既知のまたは既定の角度関係から決定される。制約をもたらすパラメータ化された表面情報は、受信機を収容している乗物が移動している表面の配向とすることができる。受信機は、初期のGPS位置を使用して、パラメータ化された表面上、したがって、既知の表面の配向上の乗物の位置を決定する。受信機は、次に、関連するGPS速度ベクトルを使用して、表面上の乗物のロール、ピッチ、及び方位を決定する。その後、受信機は、乗物の計算されたロール、ピッチ、方位、及び、乗物とIMUボディフレームとの間の既知のまたは既定の角度関係を使用して、IMUボディフレームを受信機によって使用される計算上のフレームまたは基準フレームに関連付ける回転行列を決定する。 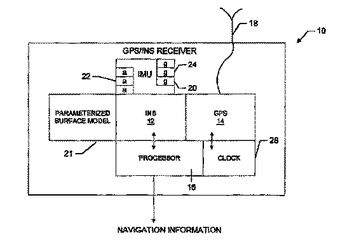 (もっと読む)
(もっと読む)
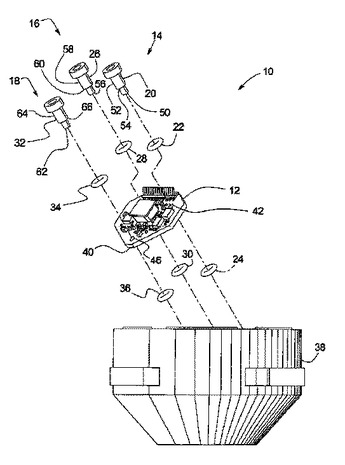
慣性センサアセンブリの弾性振動および衝撃絶縁
慣性センサシステムは、ベース、慣性センサ、および絶縁装置装着具を有する。絶縁装置装着具は、慣性センサをベースに固定し、絶縁装置装着具は、ボルトと、第1および第2振動吸収部材とを含む。ボルトは、慣性センサおよびベースを通して挿入され、第1振動吸収部材が、ボルトと慣性センサとの間にあり、第2振動吸収部材が、慣性センサとベースとの間にある。絶縁装置装着具が、ベースを通してホストシステムから伝播する振動、衝撃および/または音響雑音から慣性センサを絶縁する。
 (もっと読む)
(もっと読む)
161 - 163 / 163
[ Back to top ]