
Fターム[2F129BB25]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 角速度センサ (5,830) | ピッチ (163)
Fターム[2F129BB25]に分類される特許
121 - 140 / 163
入力システム
【課題】 表示装置にて表示される地図上の勾配を、表示画面上の操作部の操作を行なわない場合においても認識することができる入力システムを提供する。
【解決手段】 車両に搭載される地図表示装置400の入力システム1であり、画面表示されたポインタ410を、同じく画面表示された地図上の予め定められた経路405に沿って相対移動させるに伴い、該経路405上の勾配値変化を反映した形で操作部21の中立角度位置が変更するよう駆動する。
(もっと読む)
情報提供装置

【課題】運転者が道に迷ってしまった場合に、あらためて運転者に経路設定の操作をさせずに適当な目的地の候補の情報を提供することができる情報提供装置を提供する。
【解決手段】運転者の視線方向を顔画像ごとに検出する視線検出手段12と、車両の位置情報を取得する位置情報取得手段26と、顔画像ごとの視線方向に基づき走行経路に迷いを生じているか判定し、生じている場合、運転者の視線方向の系列を抽出する判定手段21と、複数の運転者における履歴情報を格納するデータベースに、抽出された視線方向の系列と相関関係のある視線方向の系列を含む履歴情報があるかの検索依頼情報を生成し検索を行う手段に送信する処理手段20と、情報の表示手段17と、受けた履歴情報に基づき到達地の情報と到達地までの経路情報を表示手段に表示させる表示制御手段18とを備える。
(もっと読む)
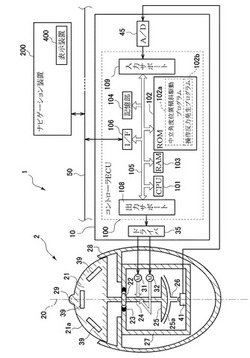
測位装置及び測位方法及びプログラム
【課題】厳しい受信環境下での乱れた走行軌跡を滑らかにし、測位精度の劣化を抑える。
【解決手段】測位装置100は、測位信号を送信する人工衛星から前記測位信号を受信して所定の情報を抽出し、前記所定の情報を使用して測位計算を行って緯度経度座標値を出力する測位計算部101と、初期値と初期誤差共分散行列と駆動雑音行列と観測雑音行列を読込み、前記初期値と前記初期誤差共分散行列と前記駆動雑音行列と前記観測雑音行列を使用して時間外挿値と伝播誤差共分散行列を計算し、前記測位計算部101が出力した緯度経度座標値を読込み、前記緯度経度座標値を地球楕円体面座標値に変換し、前記地球楕円体面座標値を使用して観測更新値と更新誤差共分散を計算し、前記地球楕円体面座標による観測更新値を緯度経度座標値に変換して出力する整形処理部102と、前記整形処理部102が出力した緯度経度座標値を表示する測位結果表示部103とを備える。
(もっと読む)
慣性航法装置およびその誤差補正方法
【課題】磁気方位センサの誤差や荒天時の風などの外乱に左右されることなく、より安定して姿勢/方位の初期データの精度を向上させることができる慣性航法装置を実現する。
【解決手段】移動体搭乗者のヘルメットに取付けられたジャイロセンサと加速度計の出力を利用して当該搭乗者頭部の位置や姿勢を求める慣性航法装置において、ジャイロセンサおよび加速度計の出力を補正するセンサ誤差補正計算部と、センサ誤差補正計算部により補正されたジャイロセンサおよび加速度計の出力を利用して頭部の位置や姿勢を計算するとともに、頭部の位置や姿勢の計算結果を補正する航法・姿勢方位計算部と、頭部が静止状態にあるときに航法・姿勢方位計算部より出力される速度データを速度誤差として利用し、センサ誤差補正計算部で使用するセンサ誤差データを校正するとともに、姿勢/位置誤差データを校正する誤差推定計算部とを有することを特徴とする。
(もっと読む)
慣性航法装置およびその誤差補正方法
【課題】AHRSとINSで構成を共通化し、温度計を使わずジャイロの温度ドリフト誤差を補正し、基準となる姿勢・方位データを使わずジャイロセンサ誤差と加速度計誤差を補正する慣性航法装置。
【解決手段】推定センサ誤差データからジャイロと加速度計の出力を補正するセンサ誤差補正計算部と、補正後の移動体の位置や姿勢を計算し、推定姿勢/方位誤差データより移動体の位置や姿勢を補正する航法・姿勢方位計算部と、補正後の位置や姿勢の情報と移動体上のGPSセンサの絶対位置と絶対速度と比較して、ジャイロにおける温度ドリフトの影響を分離する温度誤差推定部と、分離後の温度ドリフト等の影響よりジャイロと加速度計の出力の誤差を推定しセンサ誤差補正計算部で使用するセンサ誤差データを校正し、補正後の位置や姿勢の出力の誤差を推定し航法・姿勢方位計算部で使用する姿勢/位置誤差データを校正するセンサ固有誤差推定部とを有する。
(もっと読む)
運転支援装置
【課題】自車周辺の地図データを利用した各種の運転支援アプリケーションを、安定して実行する。
【解決手段】制御回路2は、各センサ3〜6の入力信号や地図データベース8の地図データ等に基づいて、自車の地図上の位置を検出する。制御回路2は、自車周辺の地図データを利用して、地図表示等のナビゲーションや、アプリケーション制御部23による停止制御、速度制限通知等の各種の運転支援アプリケーションを実行させるに際し、対象地物の地図データ上の位置精度を表す位置精度係数、地図データの最新の調査時からの経年変化を表す経年変化係数、対象地物に関連する複数の情報の地図データ上と実際との一致率を表す情報精度係数から地図信頼度を算出する。アプリケーション毎の要求精度と、算出された地図信頼度との積が、所定値以上であれば、該当する地図データを利用する。
(もっと読む)
測位システム、測位方法及びカーナビゲーションシステム
【課題】受信可能なGPS衛星の数が十分でなくても移動体の位置を精度よく測位可能な測位システム、カーナビゲーションシステムを提供すること。
【解決手段】人工衛星から発信される電波を利用した測位と自律航法による測位とを協調制御して、移動体の位置を推定する測位システム10において、捕捉された人工衛星が3未満の場合、電波を利用して測位された範囲から、自律航法により測位された慣性測位位置との距離が最小となる地点を抽出し、当該地点を電波を利用して測位された衛星測位位置と推定することを特徴とする。
(もっと読む)
車両挙動表示装置
【課題】表示された計器の読み取りとその解釈を介さないで、即ち、視覚による自己運動知覚により車両挙動変化を直接視覚的に体感させることのできる車両挙動表示装置を提供する。
【解決手段】車両挙動検出装置21は、車両の車速、ピッチ角、ロール角、ヨー角を検出する。表示画像制御装置31は、車速、ピッチ角、ロール角、ヨー角に基づいて、車両挙動に従って変化する外界の風景の動きを模擬し、その動きの方向と一致した方向へ運動する正弦波によって輝度変調された縞パタンを作成し、縞パタンを表示する楕円形の表示窓の傾き、表示位置、時間周波数、基準空間周波数、コントラスト、色等を計算し、各表示部41,42,43へ出力する画像信号を生成する。表示部41,42,43は、それぞれ楕円形の表示窓に縞パタンを表示する。
(もっと読む)
ナビゲーション装置
【課題】道路情報を安定して検知できない場合や、もしくは目標とする車両の特定が困難な場合においても、自車の進むべき方向をわかりやすく案内できるようにする。
【解決手段】自車の周辺に関する周辺情報を受信し、自車の外に存在する複数のオブジェクトが写った一又は複数の撮影画像を入力する。入力された一又は複数の撮影画像を解析することにより、一又は複数の撮影画像に写っている各オブジェクトとそのオブジェクトの属性とを判別する。受信した周辺情報と、一又は複数の撮影画像の解析の結果とに基づいて、判別された複数のオブジェクトのうちのどのオブジェクトを目標オブジェクトとするかを判断する。目標オブジェクトとされたオブジェクトが写っている撮影画像を表示し、且つ、該撮影画像上で、目標オブジェクトを強調表示する。
(もっと読む)
自動走行用マップ作成装置、及び自動走行装置。
【課題】 誤差が少ないマップデータを作成する。
【解決手段】 自動走行用マップ作成装置1は、道路に沿った領域が多数の小領域に分割され、各小領域ごとに計測対象の存在を示す重みが対応付けられるマップが記憶された記憶部34と、計測機器を搭載した車両が道路を走行するごとに得られる計測対象の位置データを利用して、当該位置データに対応する小領域に、計測対象の存在を示す重みを加算する同一道路情報結合部30と、を備えている。
(もっと読む)
ナビゲーション装置
【課題】目的地に近付いた場合に、経路案内の継続の要否を適切に判定することが可能なナビゲーション装置を提供する。
【解決手段】カーナビゲーション装置1の制御回路2は、車両が目的地手前の距離Amの判定ポイントに到達すると、目的地までの経路状況に基づき経路案内を継続するか否かを決定する。即ち、経路状況に応じて、運転者にとって目的地に到達することが容易であるか否を判断し、到達が比較的困難であると判断した場合に経路案内を継続する。
(もっと読む)
たて抗掘削機用方位検出装置及びそれを用いたたて抗掘削時の方位検出方法
【課題】本発明は、地球の自転角速度・重力を利用し、前記ドリルの旋回により生じる方位角誤差を除去し、抗掘削の方位精度を向上させることを目的とする。
【解決手段】本発明によるたて抗掘削機用方位検出装置及びそれを用いたたて抗掘削時の方位検出方法は、方位検出部(20)が検出する地球の自転角速度・重力を利用し、ドリル(2)の旋回により生じる方位角誤差を除去する構成と方法である。
(もっと読む)
移動体のセンサ補正装置、停止判定装置およびその方法
【課題】従来の速度センサを用いて、移動体が停止していることを判定し、停止判定をしている間に閾値を用いて、自立センサのバイアスやドリフト等の誤差を補正する方法では、センサの個体差から適切な閾値を設定することが難しい。
【解決手段】移動体の加速度を検出する加速度センサ11と、加速度センサ11のデータ系列のランダム性を判定する独立性判定手段12と、移動体が走行している路面の傾斜角を算出する傾斜角演算手段13と、加速度センサの補正値を格納する記憶媒体14と、加速度センサの補正値を算出する加速度センサの補正値演算手段15とを備え、移動体の走行状況を正確に判定し、路面の傾斜角を算出することで、閾値を用いなくともセンサを補正することが可能となる。
(もっと読む)
移動体用地図情報更新装置、ナビゲーション装置および移動体用地図情報更新システム
【課題】目的地や経由地までの本来の最適な経路を素早く設定できるようにする。
【解決手段】制御回路が存在可能領域から外れたことが決定されると(S1)、当該地図ブロックの最新データが存在するときに(S3:YES)、サーバからその地図ブロックの地図情報を取得して更新し(S4)、更新された地図ブロックの周囲の地図ブロックBについて更新要と判定された地図ブロックの地図情報を順次更新する(S5〜S7)。
(もっと読む)
ナビゲーション装置
【課題】情報記録媒体より取得した情報に基づき目的地を設定する場合に、ユーザに時間的損失を与えてしまうことを回避可能なナビゲーション装置を提供する。
【解決手段】カーナビゲーション装置1の制御回路2は、QRコードより取得した施設や店舗等の情報を、当該QRコードに記録されている有効期限に基づき有効性を判断し、有効性が無いと判断すると、携帯電話機10を介してQRコードに記録されているURLにアクセスすることで代替情報を取得する。
(もっと読む)
カーナビゲーション装置
【課題】カーナビゲーション装置において、経由地或いは目的地へ行く意味を失ったような場合、その経由地或いは目的地を案内経由から消去する。
【解決手段】案内経路に沿って走行中に、例えば用を済ませるために途中で立ち寄った施設があると、その立ち寄り施設が経由地または目的地として設定された施設と同じカテゴリーに属する施設であるか否かを判断し、同じカテゴリーであった場合、その経由地または目的地を案内経路の経由地または目的地から削除する。
(もっと読む)
慣性航法システム
【課題】 簡単な構造で、姿勢がほぼ安定して長時間・長距離航行する移動体に用いる場合のジャイロ及び加速時計のドリフト・バイアス誤差を低減する慣性航法システムを提供する。
【解決手段】 慣性航法システム座標系の直交する三軸周りの角速度を検出する少なくとも3個のジャイロスコープ1と、慣性航法システム座標系の直交する三軸方向の加速度を検出する少なくとも3個の加速度計2とを有する慣性測定部Sを備えた慣性航法システムIにおいて、慣性測定部Sを上面に配置し、上面と直交する慣性航法システム座標系の一軸周りに回転をする回転台3と、回転台3の回転角を検出する回転角検出手段4とを有する回転台部Rと、慣性測定部Sと回転台部Rからの出力により姿勢情報及び位置情報を計算する演算部Cとを備えたことを特徴とする。
(もっと読む)
移動体の水平走行判定装置及び方法
【課題】移動体が走行している路面の状態を正確に判定することのできる移動体の水平走行判定装置を提供する。
【解決手段】移動体に搭載される機器の取付け角度を算出及び検証することにより、移動体が走行している路面の状態を判定することが可能となる。具体的には、移動体が直進している場合に加速度センサ12で検出される値から筐体が取付けられている角度の候補を算出する。そして、ある程度のデータ量の取付け角度の候補を蓄積させ、正規性の検定を行うことにより、取付け角度の範囲を設定する。次に、角速度センサ10で検出される値から筐体が取付けられている角度の候補を算出し、その値が設定した範囲内にある程度のデータ量蓄積されたとき設定した取付け角度の信頼性は高く、その後に算出した取付け角度の候補から移動体が走行している路面の状況を判定することができる。
(もっと読む)
車両用データ要否判定装置、車両用データ報知装置および路側通信機
【課題】利用者が必要と考えられるときに即座にデータを確保できるようにした
【解決手段】制御部は、車両が通信可能領域に進入すると共に、この車速が所定速度以下であることを条件として通信確立して路側通信機から配信されるデータを受信し(S1〜S3)、車両が店舗エリア内に進入したことを条件としてデータ確保して表示部に対して表示制御し(S10)、所定時間経過したとしても店舗エリア外に位置していると判定したことを条件としてデータ破棄する(S7〜S9)。
(もっと読む)
ナビゲーション装置
【課題】ユーザが意図的にメモリ地点として登録しなくても目的地や経由地等の地点を容易に入力できるようにする。
【解決手段】制御回路は入力された入力情報を地点履歴情報の地点から前方一致検索し(S3)、検索された入力情報に続く次の入力文字候補を地点履歴情報の地点中から探索し、探索された次の入力文字候補を他の入力文字候補に比較して強調表示させる(S5)。
(もっと読む)
121 - 140 / 163
[ Back to top ]