
Fターム[2F129BB25]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 角速度センサ (5,830) | ピッチ (163)
Fターム[2F129BB25]に分類される特許
21 - 40 / 163
単眼ヘッドマウントディスプレイ
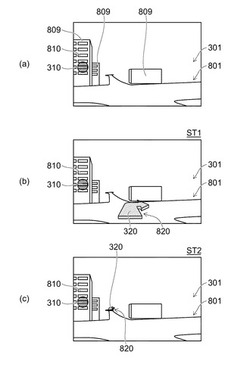
【課題】表示像の奥行きが分かり易い単眼ヘッドマウントディスプレイを提供する。
【解決手段】実施形態によれば、情報取得部と、画像データ生成部と、画像表示部と、を備えた単眼ヘッドマウントディスプレイが提供される。情報取得部は、使用者の周囲にある地面の上に設けられた立体物の位置に関する立体物位置情報と、使用者に対する指示位置に関する指示位置情報と、を取得する。画像データ生成部は、使用者に提供情報を提供するための情報オブジェクトを含む画像データを生成する。画像表示部は、画像データに基づく画像を、実景に重畳して使用者の片目に表示する。画像データ生成部は、情報オブジェクトが立体物に重畳するように画像内に情報オブジェクトを配置してから、情報オブジェクトが指示位置に重畳するように画像内で情報オブジェクトを移動させるように画像データを生成する。
(もっと読む)
位置標定装置、位置標定装置の位置標定方法および位置標定プログラム

【課題】高精度でないIMUと1台のGPS受信機とを用いて車両の位置を高精度に標定できるようにすることを目的とする。
【解決手段】初期値算出部110は、車両の出発時に3自由度2次元航法により方位角の初期値を算出する。走行時標定部121は、車両が停車するまで、方位角の初期値または前回の方位角を用いて6自由度3次元航法により位置と姿勢と方位とを標定する。停車時標定部122は、車両が停車している間、方位角を拘束する拡張ZUPTアルゴリズムに基づいて6自由度3次元航法により位置と姿勢と方位とを標定する。
(もっと読む)
加速度検出方法、位置算出方法及び加速度検出装置
【課題】移動体の加速度をより適切に検出するための新しい手法の提案。
【解決手段】姿勢調整部20は、移動体に設置された姿勢センサー4の検出姿勢を、移動体に設置された加速度センサー3の検出加速度ベクトルと移動体の移動に係る所与の参照ベクトルとを用いて調整する。そして、座標変換部30は、姿勢調整部20により調整された検出姿勢を用いて、移動体のローカル座標系から絶対座標系への座標変換に係る変換係数を求め、当該変換係数を用いて、加速度センサー3の検出加速度ベクトルを絶対座標系における加速度ベクトルに座標変換する。
(もっと読む)
地図表示制御装置、地図表示制御方法、およびプログラム
【課題】スクロール速度により地図上の地点間の勾配を示す。
【解決手段】地図表示制御装置10は、地図の表示範囲をスクロール移動する前の表示範囲内の地点である第1の基準地点の位置情報、及びスクロール移動先の上記地図の表示範囲の基準となる第2の基準地点の位置情報を取得する基準地点取得部151と、上記第1の基準地点と上記第2の基準地点との間の標高差を取得する標高差取得部152と、上記第1の基準地点と上記第2の基準地点との間の距離、及び上記標高差に基づいて、上記第1の基準地点と上記第2の基準地点との間の勾配を算出する勾配算出部153と、上記勾配に基づいて、上記スクロール移動の速度を決定する速度決定部154と、上記速度決定部により決定された速度で上記地図の表示範囲がスクロール移動するように上記地図の表示を制御する表示制御部158と、を有する。
(もっと読む)
状態推定装置、状態推定方法および状態推定プログラム
【課題】高速に状態ベクトルを収束させる。
【解決手段】状態推定装置は、非線形カルマンフィルタKF1〜KF10と、各フィルタの観測残差ekのノルムの最大値を検出する観測残差ピークモニタPM1〜PM10と、互いに異なる初期姿勢を示す初期値INI1〜INI10を生成する初期値生成部130Aを備える。初期値INI1〜INI10が与えられると、非線形カルマンフィルタKF1〜KF10は並列に動作する。そして、比較部110は、観測残差ekのノルムの最大値を比較し、最も小さいノルムの最大値に対応する非線形カルマンフィルタの出力を選択するように選択部120を制御する。
(もっと読む)
周遊ルート生成装置、周遊ルート生成方法、及びプログラム
【課題】ユーザによる目的地の指定を必要とせず、出発地点からの周遊ルートを生成することのできる周遊ルート生成装置、周遊ルート生成方法、及びプログラムを提供する。
【解決手段】周遊ルート生成装置は、生成する周遊ルートの目標ルート距離を取得する距離取得部と、上記周遊ルートの出発地点とする基準点を取得する基準点取得部と、上記周遊ルートの経由地点を決定する経由地点決定部と、上記基準点から上記経由地点を経由し、再び上記基準点に戻るまでのルート距離が、上記目標ルート距離となる周遊ルートを生成する周遊ルート生成部と、を有する。
(もっと読む)
車両駆動制御装置
【課題】目的地に至る経路を特定するための操作を必要とすることなく、エネルギー消費量の低減を図る。
【解決手段】制御指標のスケジュールを規定するための走行条件を区間毎に収集して耐久記憶媒体23に蓄積記憶させる。バッテリ残量が下限規格値または上限規格値となった場合、このバッテリ残量が下限規格値または上限規格値となった地点を含む前後の一定区間を計画制御対象候補区間とし、この区間について耐久記憶媒体23に蓄積記憶された走行条件を用いてバッテリ残量が規格範囲内となるように制御指標のスケジュールを計画する。車両が計画制御対象候補区間に進入した場合、この区間の制御指標のスケジュールに従って動力源の駆動制御を行う。
(もっと読む)
移動体用装置
【課題】太陽電池パネルを搭載した移動体に搭載されて用いられる移動体用装置であって、多くの太陽光を受光して発電量を向上させることが可能な移動体用装置を提供する。
【解決手段】本発明の移動体用装置は、太陽電池パネルが搭載された移動体に搭載されて用いられる。移動体用装置は、日付及び時刻を示す日時情報を取得する日時情報取得部を備える。また、太陽高度及び太陽方位角を示す太陽情報を算出する太陽情報算出部を備える。また、停留可能位置の日射量を太陽情報に基づいて算出し、最も日射量が多いと推定される停留可能位置を通知する停留位置通知部を備える。これにより、駐車場等の停留可能位置の中で、何れの区画に停留させるのが太陽光発電において望ましいかをユーザに伝える。
(もっと読む)
情報提供装置、及び、情報提供システム
【課題】ユーザにとって有用な情報を合理的に提供可能で利便性の高い情報提供システム等を実現する。
【解決手段】情報提供システム1では、車載用ナビゲーション装置20が、位置検出部22にて取得した現在地情報に基づいて、当該車両の駐車時間が所定時間以上である滞在場所を表す滞在情報を管理装置30に送信する。一方、管理装置30が、車載用ナビゲーション装置20から複数受信した滞在情報にそれぞれ対応する位置データに基づいて、当該ユーザの滞在場所を全て包含する集合エリアを当該ユーザの生活圏と推定する。そして、この生活圏を検索範囲として設定し、この検索範囲に適合する情報を施設等情報DB33から抽出して車載用ナビゲーション装置20に送信することによって、当該ユーザに施設等情報を提供する。これにより、当該ユーザの行動範囲内における生活様式に沿った情報が自動的に提示される。
(もっと読む)
姿勢角安定化装置及び方法
【課題】高精度速度計測装置に組み込まれて、移動体の静止時における位置、速度及び方位の変化を解消すると共に、静止状態から動的状態に切り替わるときであっても、連続的な姿勢角及び速度応答出力を行うことができるようにする姿勢角安定化装置及び方法を提供すること。
【解決手段】姿勢角安定化装置100は、移動体の角速度とフィードバックした補正値とから姿勢角の変化量を算出し、算出した姿勢角の変化量を積分した姿勢角と、カルマンフィルタによって推定された姿勢角の推定値とから姿勢行列を生成し出力する。そして、動作時と判定した場合に生成した姿勢行列のラッチを行い、静止時と判定した場合に静止時であると判定する前の姿勢行列のラッチを保持し、ラッチしている姿勢行列と、生成した姿勢行列とから姿勢角誤差を算出し、算出した姿勢角誤差と生成した姿勢行列とに基づいて姿勢角を補正するための補正制御値を算出し、フィードバックする。
(もっと読む)
ナビゲーション装置
【課題】処理負荷が高くなることを抑制しつつ、立体道路における案内経路の視認性を向上することができるナビゲーション装置を提供する。
【解決手段】制御回路17は、現在位置から所定範囲内の案内経路に立体道路がある場合(立体道路走行中の場合を含む)には、断面画像31を表示するように表示器15を制御する。断面画像31は、立体道路を鉛直方向に切断した断面を模擬した画像である。断面画像31が表示される。これによってどの道路を進むべきなのかを断面画像31によって容易に判読することができるので、立体道路における案内経路の視認性を向上することができる。
(もっと読む)
ナビゲーション装置
【課題】必要に応じて自動的に投射映像の表示が開始される車載用ナビゲーション装置を提供する。
【解決手段】自車両の周辺を撮影し映像信号を出力するカメラ群180と、自車両が走行する道路において、自車両が走行可能な道路幅が所定幅以下であることを検知する隘路検知部113と、検知に応じて、道路において自車両による走行が困難か否かを判定する難路判定部114と、難路判定部114により走行が困難であると判定されたことに応じて、映像信号に基づく投射映像を表示する投射映像表示部117と、を備える車載用ナビゲーション装置100。
(もっと読む)
慣性センサ,磁気センサおよび速度計を用いた移動体の姿勢推定装置および姿勢推定方法
【課題】軽量,小型および安価であって、低精度なセンサ群とカルマンフィルタを組み合わせることにより姿勢情報の計算にあたって四元数を用い、センサの観測値から計算する修正量も四元数とすることにより高精度で移動体の姿勢誤差を推定し、十分な精度で移動体の姿勢を推定することができるジャイロ,加速度計,磁気センサおよび速度計を用いた移動体の姿勢推定装置および姿勢推定方法を提供する。
【解決手段】航空機にジャイロ装置11,加速度計12,磁気センサ14および速度計13を搭載する。演算器15,カルマンフィルタ19でこれらセンサに基づいた演算を行い、航空機の姿勢情報を計算する。姿勢情報の計算には四元数を用い、観測値から計算する修正量も四元数とすることにより、これを計算値に乗じることにより正確な姿勢を推定する姿勢推定装置を実現する。
(もっと読む)
姿勢推定装置及び方法、姿勢制御装置及び方法、並びにプログラム
【課題】3次元の姿勢角を求めるための計算を効率よく行うことができ、演算時間を短縮でき、かつ演算速度を向上することができる姿勢推定装置及び方法、姿勢制御装置及び方法、並びにプログラムを提供する。
【解決手段】姿勢制御装置は、状態フィードバックを用いて移動体の姿勢の推定を行う。この姿勢制御装置は、姿勢及び姿勢変化率が入力され、これらを四元数に変換する入力部101と、四元数に変換された姿勢及び姿勢変化率を使用してフィルタ演算するフィルタ演算部102と、フィルタ演算により得られた姿勢に基づき移動体の姿勢制御を行う姿勢制御部104とを有し、フィルタ演算部102は、姿勢の推定を行うためのフィルタ演算に球面線形補間を使用する。
(もっと読む)
リンク情報生成装置及びリンク情報生成プログラム
【課題】消費電力を低減しつつ、ユーザの直進距離の情報を含むリンク情報を高精度に算出する。
【解決手段】判定部34が、加速度情報検出部50により歩行が検知されている間に、地磁気情報検出部40により取得される地磁気の変化量に基づいて、ユーザの歩行状態を判定し、リンク情報算出部36は、加速度情報検出部50による検出結果と、判定部34による判定結果と、に基づいて、ユーザの直進距離の情報を含むリンク情報を算出する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】人間用搬送機器の搬送路にユーザーが乗った際のユーザーの位置を正しく求めるための新たな手法を提案すること。
【解決手段】位置算出システム1において、ナビゲーション装置2は、動く歩道の乗り口位置に設置された乗り口発信器3からの発信信号を受信することで、ユーザーが動く歩道に乗ったことを検出する。そして、乗り口発信器3から受信した動く歩道の搬送速度を積分し、歩行検出処理によってユーザーの一歩が検出されない場合には搬送速度を積分して得られる歩道の移動距離を用いて、ユーザーの一歩が検出された場合は搬送速度を積分して得られる歩道の移動距離及びユーザーの一歩の歩幅を用いて、動く歩道の搬送路上におけるユーザーの移動距離を算出する。
(もっと読む)
姿勢情報算出装置、姿勢情報算出システム、姿勢情報算出方法及び姿勢情報算出プログラム
【課題】簡易な構成でありながら、位置の発散を抑制して仮想3次元空間における姿勢を適切に算出することができる姿勢情報算出装置、姿勢情報算出システム、姿勢情報算出方法及び姿勢情報算出プログラムを提供する。
【解決手段】センサー情報取得部210は、3つの角速度センサーがそれぞれ検出する3軸回りの角速度情報(GX、GY、GZ)と3つの加速度センサーがそれぞれ検出する3軸方向の加速度情報(AX、AY、AZ)を取得する。姿勢情報算出部220は、角速度情報(GX、GY、GZ)と加速度情報(AX、AY、AZ)に基づいて、仮想3次元空間における姿勢角と位置座標を算出する。特に、姿勢情報算出部220は、加速度情報(AX、AY、AZ)から得られる慣性座標系加速度ベクトル(A)に基づいて固定座標系速度ベクトルを算出し、当該固定座標系速度ベクトルに対応づけて仮想3次元空間における位置座標を算出する。
(もっと読む)
ナビゲーション装置、ナビゲーション方法およびプログラム
【課題】停車時間に拠らずに適切な停車場所を登録する。
【解決手段】ナビゲーション装置10は、位置情報を取得する取得部142と、ユーザ操作に応じて目的地を設定する設定部116と、位置情報を用いて目的地までの経路を案内する案内部124と、ユーザ操作に応じてナビゲーションモードを切り替える切替部118と、切替部によりナビゲーションモードが切り替えられた切替地点の位置情報と目的地とを関連付けて記憶媒体に記録する記録部120と、を備える。
(もっと読む)
水中航走体の位置較正方法
【課題】 音響測位可能な領域が小さくても精度よく位置較正できるようにする。
【解決手段】 音響測位実施可能領域23に、円周状位置検出用経路24を設定する。水中航走体6を、自身で計測する慣性航法位置25に基づいて円周状位置検出用経路24に沿って航走させながら、支援船側より音響測位を行う。次いで、水中航走体6が最も東寄りに位置するときの音響測位位置26の経度成分の代表値27と、慣性航法位置25の経度成分の代表値29から経度方向に関する偏差δxを求め、水中航走体6が最も南寄りに位置するときの音響測位位置26の緯度成分の代表値28と、慣性航法位置25の緯度成分の代表値30から緯度方向の偏差δyを求める。その後、各偏差δx,δyにより水中航走体6が自身で測位する慣性航法位置25を較正させる。
(もっと読む)
歩幅推測方法、移動軌跡算出方法及び歩幅推測装置
【課題】歩幅をより正確に推測するための新たな手法を提案すること。
【解決手段】ナビゲーション装置1において、加速度センサー41の検出結果に対するフィルター処理が行われ、Z軸の加速度のピークが検出されることで、ユーザーの歩行が検出される。そして、フィルター処理されたZ軸の加速度を用いて、ユーザーの歩行速度に応じて予め定められた相関モデル式に従ってユーザーの歩幅が推測される。また、ジャイロセンサー43の検出結果に対してもフィルター処理が行われ、フィルター処理されたZ軸回りの角速度に対する積分処理が行われて、ユーザーの歩行方向が推測される。そして、推測された歩幅と歩行方向とを用いて、ユーザーの移動軌跡が算出される。
(もっと読む)
21 - 40 / 163
[ Back to top ]