
Fターム[2F129BB65]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 停止時 (68)
Fターム[2F129BB65]に分類される特許
61 - 68 / 68
車両用現在位置決定装置
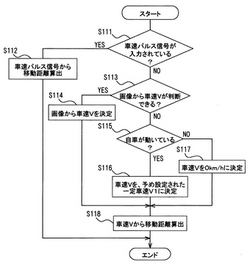
【課題】車両の方位と移動距離とから車両現在位置を逐次決定する車両用現在位置決定装置において、車速センサからの車速パルス信号が得られないような低車速時であっても車両の移動距離を算出することができるようにする。
【解決手段】 車両に設けられたカメラによって連続的に撮像される車両周辺の画像の変化に基づいて車速を決定する車速決定手段(S114、S116、S117)と、その車速決定手段によって決定された車速を用いて移動距離を算出する移動距離算出手段(S118)とを設け、車速パルス信号が得られているときはその車速パルス信号から移動距離を算出するが、車両が走行中であるにも拘らず、車速パルス信号が得られないときには、車速決定手段および移動距離算出手段を実行して移動距離を算出する。
(もっと読む)
補正値記憶装置および補正装置

【課題】補正値の精度を高めることができる補正値記憶装置を提供すること。
【解決手段】温度センサ13およびジャイロセンサ14とバッテリ15との間には、バッテリ15に対してイグニションスイッチ10を介さずに接続される端子16が設けられている。すなわち、温度センサ13およびジャイロセンサ14とバッテリ15とは、端子16を通る回路およびイグニションスイッチ10に接続された端子17を通る回路の2系統で接続可能である。そして、温度センサ13およびジャイロセンサ14と端子16および端子17との間には、温度センサ13およびジャイロセンサ14を端子16および端子17の何れに接続するかを切り換えるスイッチ18が設けられている。出力IF6には、CPU4からの命令に応じてスイッチ18に接続を切り換えさせるスイッチ制御回路20が接続されている。
(もっと読む)
加速度の較正方法、及びナビゲーション装置
【課題】 加速度センサの出力値と基準値とに基づいて加速度を求めるナビゲーション装置で、加速度センサの出力値の基準値を精度良く得ることによって加速度を較正する方法、及びナビゲーション装置を提供する。
【解決手段】 加速度測定部2を備えるナビゲーション装置1は、略水平に作られていることが多い交差点に自動車が停止したときに加速度センサ21の出力値を取得し、取得した出力値を記憶し、記憶した複数の出力値を平均することによって、自動車が水平に静止している状態での加速度センサ21の出力値である基準値を計算する。またナビゲーション装置1は、同一の交差点で自動車の進行方位が互いに対向する方位である状態で取得した二つの出力値に対して重み係数を設定しておき、基準値を計算する際に重み係数で重み付けした出力値の重み付け平均を行う。
(もっと読む)
加速度を利用した処理装置
【課題】車両の前後方向の加速度から高精度の距離を求める。
【解決手段】車両の前後方向の加速度に含まれる誤差をHPFで補正する加速度補正処理を行い、補正後の加速度を積分して速度を得る速度算出処理を行う。また加速度の過去n秒間の分散を求め、停止中フラグがセット状態で分散が停止中閾値以上であれば停止中フラグをクリアし、クリア状態で分散が走行中閾値以下であれば停止中フラグをセットする停止判定処理を行い、この停止中フラグがセット状態であれば速度をゼロに補正し、クリア状態であれば速度が閾値1≦速度≦閾値2となるように補正して、補正前後の速度差から速度誤差量を求める速度補正処理を行う。そして補正後の速度を積分して距離を求める距離算出処理を行い、この距離から速度誤差量に基づいて求めた距離誤差量を引いて補正後の距離を求める距離補正処理を行う。
(もっと読む)
加速度を利用した処理装置
【課題】車両の前後方向の加速度から高精度の距離を求める。
【解決手段】車両の前後方向の加速度に含まれる誤差をHPFで補正する加速度補正処理を行い、補正後の加速度を積分して速度を得る速度算出処理を行う。また加速度の過去n秒間の分散を求め、停止中フラグがセット状態で分散が停止中閾値以上であれば停止中フラグをクリアし、クリア状態で分散が走行中閾値以下であれば停止中フラグをセットする停止判定処理を行い、この停止中フラグがセット状態であれば速度をゼロに補正し、クリア状態であれば速度が閾値1≦速度≦閾値2となるように補正して、補正前後の速度差から速度誤差量を求める速度補正処理を行う。そして補正後の速度を積分して距離を求める距離算出処理を行い、この距離から速度誤差量に基づいて求めた距離誤差量を引いて補正後の距離を求める距離補正処理を行う。
(もっと読む)
車載機器
【課題】 温度変化によるずれを補正することで、実際の車体の状況に即した表示を可能とする。
【解決手段】 この車載機器には、車体に取り付けられる車載機器本体と、車載機器本体に設けられて種々の情報を表示する表示手段と、車載機器本体の進行方向に対する傾き及び水平方向に対する傾きを検出することで加速度を検出する加速度検出手段と、加速度検出手段の検出結果に基づいて表示手段を制御する制御手段とが備えられている。制御手段は、加速度検出手段が検出した進行方向に対する傾き及び水平方向に対する傾きが所定時間一定であった場合には、車体が停止状態と判断して、所定時間一定であった傾きを進行方向及び水平方向の基準値として設定する。
(もっと読む)
ナビゲーション装置及び受信装置
【課題】車両を使用して外出した場合に適切なタイミングでホームオートメーション機器の動作指示ができるシステムを提供する。
【解決手段】自車位置を検出する自車位置検出手段と、目的地を設定する目的地設定手段と、予め定められた登録地点を目的地とし、前記自車位置検出手段により検出された自車位置が該登録地点に接近したときに、所定の機器の動作を開始させる動作開始信号を無線機を介して送信する送信手段とから構成されている。
(もっと読む)
ナビゲーション装置
【課題】 装置の取り付けの簡素化、安全性の向上を図ることができるナビゲーション装置を提供する。
【解決手段】 車両の進行方向における加速度を検出する加速度センサ101と、車両のヨー動作方向の角速度を検出するジャイロセンサ3とを備え、演算手段109は、まず加速度センサ101により得た加速度情報より速度および走行距離△Dnを計算し、ジャイロセンサ102により得た角速度情報より移動方位
θznを計算し、求めた走行距離△Dnと移動方位θznと車両の位置を求める。
(もっと読む)
61 - 68 / 68
[ Back to top ]