
Fターム[2F129BB65]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 停止時 (68)
Fターム[2F129BB65]に分類される特許
21 - 40 / 68
車載角速度検出装置

【課題】角速度をより適正に計測すること。
【解決手段】車両の鉛直軸に直交する第1の方向に振動子を励振振動させる励振振動手段と、車両の鉛直軸及び第1の方向に直交する第2の方向における振動子の変位を検出する変位検出手段と、変位検出手段により検出された変位に基づいて、車両の鉛直軸周りの角速度を算出する算出手段と、を備える車載角速度検出装置であって、車両を回動させるターンテーブルの角速度を、算出手段の算出結果に依らずに取得するターンテーブル角速度取得手段と、車両がターンテーブルにより回動しているときに算出手段により算出された角速度と、ターンテーブル角速度取得手段により取得されたターンテーブルの角速度との比較に基づいて、算出手段の算出傾向を修正する修正手段と、を備えることを特徴とする。
(もっと読む)
ナビゲーションシステムの位置検出装置および位置検出方法

【目的】センサー数が少ないシステムであっても、位置精度や方位精度を向上できるようにする「ナビゲーションシステムの位置検出装置および位置検出方法」を提供することである。
【構成】車速センサーと加速度センサーと角速度センサーとを含むセンサー部、これらセンサーから出力される信号を用いて所定の周期で車両の現在位置、車両速度、車体の姿勢角を含む状態量を計算する自律航法計算部を備え、車両の位置を検出するナビゲーションシステムの位置検出装置である。自律航法計算部は、車速センサーから出力される信号を用いて前回の状態量計算時刻から今回の状態量計算時刻までに移動した移動量を計算する移動量算出部、車体の姿勢変化量を計算する変化量検出部、姿勢変化量を用いて移動量を車体の前後方向、車体の左右方向、車体の上下方向の方向成分に分解する移動量分解部、各方向成分を用いて今回の状態量計算時刻における車両の位置を計算する状態量計算部を備えている。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】方位のばらつきに起因する測位位置の直進性の低下を防止すること。
【解決手段】携帯型電話機1において、第1のKF(カルマンフィルタ)測位処理により求めた携帯型電話機1の移動速度が所定の閾値速度未満であることを検出した場合に、当該検出直前の携帯型電話機1の移動速度を保持する。そして、第1のKF測位処理により求めた携帯型電話機1の位置、移動速度及び方位を観測情報とする第2のKF測位処理を行って測位するが、この際、保持されている方位を観測情報としてKF処理を行う。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】GPSによる測位と慣性航法による測位とを行う測位装置において、消費電力の
削減を図ること。
【解決手段】カーナビゲーション装置1において、GPS衛星信号の受信状況を示す指標
値が、予め定められた第1低レベル条件を満足するか否かが判定され、満足すると判定さ
れた場合には、慣性航法用センサを起動状態(ON)とし、満足しないと判定された場合
には、慣性航法用センサを停止状態(OFF)とする制御が行われる。また、第1低レベ
ル条件を満足すると判定された場合には、上述した指標値が、第1低レベル条件よりもレ
ベルの低い第2低レベル条件を満足するか否かが判定され、満足すると判定された場合に
は、慣性航法演算処理が行われて慣性航法演算位置が出力位置に決定され、第2低レベル
条件を満足しないと判定された場合には、GPS受信部20により測位されたGPS測位
位置が出力位置に決定される。
(もっと読む)
車載ナビゲーションシステム及びナビゲーション方法
【目的】開発効率化と高精度を達成するために任意のセンサー構成のシステムでも基本システムと同一のソフトウェアで制御を行なえるようにする「車載ナビゲーションシステム及びナビゲーション方法」を提供する。
【構成】車速パルスセンサー、加速度計や角速度計(ジャイロスコープ)およびGPS受信機を含む複数のセンサーを複合した車載ナビゲーションシステムにおいて、いくつかのセンサーの組み合わせで構成される複数のシステムの中から選択した所定のセンサー構成システムと全センサーを備えた基本システムとの差異を補完し、該補完された値及びシステムのセンサー出力信号を用いて自律航法計算し、基本システムの制御アルゴリズムに基づいてカルマンフィルタ処理を行って車両の位置、速度及び姿勢の推定値を得る。
(もっと読む)
車載処理装置
【課題】地図データに整備されていないターンテーブルを備えた駐車場を利用する際に、車両の進行方向を正確に把握することができる車載処理装置を提供する。
【解決手段】ユーザがメモリ地点を登録する際、方向補正係数の情報を付加することでターンテーブル駐車場を退出(出庫)した直後の道路地図上の自車マークと車両の実際の位置との位置ずれをなくすことができ、正確な経路探索及び経路案内が可能となる。
(もっと読む)
車載用処理装置、ナビゲーション装置、及び車両進行方位補正プログラム
【課題】自車両の進行方位を検出することができない電源オフ状態の間に方向転換装置によって自車両の方向転換が行われた場合であっても、自車両の進行方位を適切に表す進行方位情報を取得することが可能であるとともに、そのために電源オフ状態の間に画像情報を記憶しておく必要がない車載用処理装置及びナビゲーション装置等を提供する。
【解決手段】自車両の進行方位情報Dを取得する方位情報取得手段16と、自車両の周辺の画像情報Gに対する画像認識処理を行い、自車両の鏡像が撮像されたか否かを判定する鏡像判定手段35と、電源33のオン又はオフを検出する電源動作検出手段31と、電源動作検出手段31による電源オン又は電源オフの検出時を基準とする所定の判定期間内に、鏡像判定手段35により自車両の鏡像が撮像されたと判定した場合に、自車両の進行方位を反転させるように進行方位情報Dを補正する進行方位補正手段39と、を備える。
(もっと読む)
車載ナビゲーション装置
【課題】船舶から下船後の車両の経路案内を早期に再開できる低コストの車載ナビゲーション装置の提供。
【解決手段】車両が車載ナビゲーション装置1により探索された誘導経路上において、フェリーに乗船する場合、フェリー上において車両電源をオフした後、再度、車両電源をオンした時に、制御装置2はユーザに対して、フェリーが到着予定地に到着したか否かを確認する。フェリーが到着予定地に到着した場合、車両電源をオフした時に記憶された車両の位置および向きと、制御装置2のメモリに記憶されたフェリーの移動距離、移動方位および相対方位を含む船舶航行データとに基づいて、車両の現在位置および向きを補正する。
(もっと読む)
車両位置・方位修正方法及び車両位置・方位修正装置
【課題】GPS受信可能になってから短時間で車両位置、車両方位を正しい位置、方位に修正する車両位置・方位修正方法及び修正装置を提供する。
【解決手段】GPS受信機と自律航法センサーを併用するナビゲーションシステムにおいて、車両位置・方位修正部は、ナビゲーション制御停止時における車両位置と車両方位を保存し、これらをナビゲーション起動時における車両の初期位置と初期方位とする。そして、ナビゲーション起動後、自律航法センサーから得られるセンサー出力信号と、前記車両初期位置と初期方位とを用いて車両位置と方位を推測すると共に、GPS受信機より得られるGPS方位の信頼度が高くなったか監視する。GPS受信機より得られるGPS方位の信頼度が高くなったとき、車両位置・方位修正部は、該GPS方位と推測した車両位置を用いて車両の現在位置を修正する。
(もっと読む)
車両の走行制御装置
【課題】 GPSによる自車両の測位精度を保ったまま自車両の走行制御を行うことができる車両の走行制御装置を提供する。
【解決手段】 走行制御装置1は、走行経路設定部10を有する走行制御ECU2と、複数のGPS衛星からの電波を受信するGPS受信機3とを備えている。走行経路設定部10は、GPS受信機3の受信信号に基づいて、自車両の現在位置を特定すると共に各GPS衛星の配置状況の情報を取得し、目的地までの走行経路候補に対して、GPS衛星が周辺構造物に遮蔽される領域(衛星遮蔽領域)を表す衛星遮蔽領域マップを作成する。そして、走行経路設定部10は、その衛星遮蔽領域マップを用いて、目的地までの走行経路候補のうちGPS衛星の捕捉状態が最も良好であると推定される走行経路候補を自車両の走行経路として選定する。
(もっと読む)
停止判断装置、ナビゲーション装置、停止判断方法、停止判断プログラムおよび記録媒体
【課題】移動体が停止したか否かを精度よく判断すること。
【解決手段】ナビゲーション装置100の停止判断部110は、自装置が搭載された移動体が停止しているか否かを判断する。撮影部111は、移動体の移動に応じて撮影画像に変化が生じる方向に向けられている。移動速度情報取得部112は、移動体の移動速度情報を取得する。判断部113は、撮影部111によって撮影された撮影画像の変化の有無に基づいて、移動体が停止しているか否かを判断する。補正量取得部121は、判断部113による判断結果に基づいて、移動体の移動状態を検出するセンサ131からの出力信号を補正するための補正量を取得する。補正部123は、補正量を用いてセンサ131からの出力信号を補正する。算出部124は、補正部123によって補正されたセンサ131からの出力信号を用いて移動体の現在位置を算出する。
(もっと読む)
ナビゲーション装置及びナビゲーション方法
【課題】自立航法を主とするハイブリッド航法による経路誘導中に、自車がフェリーなどに乗船して移動し、降船したとき、より簡便で、かつ迅速に正しい自車位置や自車方位に更新することができる「ナビゲーション装置及びナビゲーション方法」を提供すること。
【解決手段】制御手段12は、自立航法を主とするハイブリッド航法により経路誘導中に、第1の測位手段4により検出される位置及び方位を更新して記憶させる。そして、自車が移動物体に乗ったときに、衛星航法に切り換えて、記憶した方位の更新を停止するとともに、第2の測位手段3により検出される位置及び方位を取得し、自車が移動物体から降りたときに、自立航法を主とするハイブリッド航法に切り換えて、最後に取得した衛星航法に基づく位置及び方位を用いて記憶した位置及び方位を更新する。以降は、更新した位置及び方位を基礎として経路誘導を行う。
(もっと読む)
移動体測位装置
【課題】衛星毎に異なる誤差を精度良く反映する指標値を用いて、測位に用いる衛星を適切に選択すること。
【解決手段】本発明は、移動体に搭載され、該移動体の位置を測位する移動体用測位装置において、移動体に搭載されるセンサの出力信号により移動体が停止しているか否かを判定する移動体停止判定手段と、前記移動体停止判定手段により移動体が停止していると判定されている間に観測される衛星電波の観測値を用いて、移動体の速度を、衛星毎に導出する移動体速度導出手段と、
前記移動体速度導出手段により導出された衛星毎の移動体速度に基づいて、測位に用いる衛星を選択する衛星選択手段とを備えることを特徴とする。
(もっと読む)
車両用角速度センサの零点補正装置
【課題】車両に搭載される角速度センサの零点補正精度を向上させるとともに、車両が実際に使用されている状態での零点補正処理の頻度を上げる。
【解決手段】オフディレイ回路42は、イグニッションスイッチ50のオフ後にオン状態になっている所定時間にバッテリ40からイグニッションスイッチ50を迂回して3軸角速度センサ22、3軸加速度センサ24に電源+Bを供給する。この所定時間に車両停止状態検知センサ14(例えば、燃料計)の出力変化に基づいて車両が停止していると判断したとき、零点補正手段30が、3軸角速度センサ22の出力を更新後の零点補正値として記憶手段28に記憶し、更新後の零点補正値により3軸角速度センサ22の検出値を補正する。
(もっと読む)
GPS複合航法装置
【課題】GPS受信機を含む構成のGPS複合航法装置において、移動体の静止時における移動体の推定位置、推定速度、推定方位の変化を解消すると共に、静止から移動時における応答特性の良いGPS複合航法装置を提供することを目的とする。
【解決手段】移動体の静止を判定する静止判定部を設け、該静止判定部で静止状態と判定されたとき、カルマン・フィルタの観測更新に用いる観測モデルを変更すると共に、更新による誤差共分散行列の変化分を補正することを特徴とする。
(もっと読む)
現在位置推定方法、測位方法、プログラム及び移動体端末
【課題】移動体端末が停止している場合であっても、現在位置を正しく推定すること。
【解決手段】測位部であるGPS受信部10の測位終了の際に、最後に測位された測位位置を最新測位位置とし、その際に携帯電話用無線通信回路部70により無線通信されていた基地局(停止時基地局)の識別情報(ID)の組合せがフラッシュROM80に記憶される。そして、GPS受信部10の測位再開の際に、携帯電話用無線通信回路部70により無線通信されている基地局の組合せと、フラッシュROM80に記憶されている停止時基地局の組合せとが比較判定され、一致すると判定された場合に、フラッシュROM80に記憶されている最新測位位置が携帯型電話機1の現在位置と推定される。そして、推定された現在位置が初期位置とされて、測位再開の最初の測位に利用される。
(もっと読む)
車両用ナビゲーション装置
【課題】データベースに予めターンテーブルを表す情報が格納されていなくても、自車位置を補正できるようにする。
【解決手段】自車の走行開始時に、GPS受信装置からの測位データに基づいて自車位置を表すGPS位置を測位したと判定された場合、GPS位置と推測航法を用いて算出した自車の推測位置とを比較して、ターンテーブルによる旋回が実施されたか否かを判定し(S212)、ターンテーブルによる旋回が実施されたと判定した場合、走行開始前の自車位置をターンテーブルの位置として、該ターンテーブルの位置およびターンテーブルの旋回による回転角を示すターンテーブル候補情報をデータベースに記憶する(S214)。
(もっと読む)
GPSの精度を自動的に向上するナビゲーション装置
本発明は、位置測定装置から位置情報を受信するように構成されるプロセッサを具備するナビゲーション装置に関する。プロセッサは、運動検出器から運動情報を受信し、前記運動情報を使用して前記装置が静止中であるかを判定するように更に構成される。装置が静止中であると判定された場合、プロセッサは、装置が静止中である期間に位置測定システムから受信される連続した位置に関する情報を使用してある期間にわたる平均位置を計算する。平均位置は、ユーザに命令を与える等のナビゲーションの目的で使用される。静止中に平均することにより、更に適切な命令を与えるために使用される更に正確な位置が判定される。 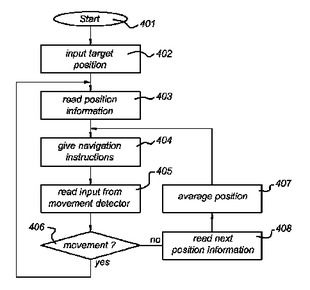 (もっと読む)
(もっと読む)
慣性航法を使用した実時間位置測量のための方法及び装置
【課題】慣性航法システムを使用して2つの地点の相対位置を決定する方法を提供する。
【解決手段】本方法は、INS(10)が第1の位置なあるときの位置誤差状態及び位置解を推定するステップと、INSが第2の位置にあるときの位置誤差状態及び位置解を推定するステップと、INSを第1の位置に戻すステップとを含む。第1及び第2の位置誤差状態の推定値は、INSを第2の位置から第1の位置へ戻す移行の間に生成された相関関係に基づいて調整される。
(もっと読む)
位置検出装置、位置検出方法、位置検出プログラム及びナビゲーション装置
【課題】電源投入後に現在位置を表示できるまでの時間を短縮できるようにする。
【解決手段】ナビゲーション装置1は、静止状態であり、且つ当該ナビゲーション装置1がクレードル4に装着されているときに、環境情報処理部30により地磁気値TM、位置情報PS及び方向情報DRを記憶部13に記憶させておき、動作停止状態から電源が投入され起動した際、クレードル4に装着され、静止状態であり、且つ記憶部13に記憶している地磁気値TMと現在の地磁気値TMとの差分が所定閾値未満であれば、周囲環境が変化していないものと判定し、記憶部13に記憶している電源切断前の位置情報PS及び方向情報DRを現在の位置情報PS及び方向情報DRとして復元することにより、電源投入後直ちに現在位置を認識することができるので、当該現在位置に応じた地図画面や経路案内画面等を提示することができる。
(もっと読む)
21 - 40 / 68
[ Back to top ]