
Fターム[2F129BB65]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 停止時 (68)
Fターム[2F129BB65]に分類される特許
41 - 60 / 68
ナビゲーション装置及び、その方法、並びにそのプログラム
【課題】マルチパス波の影響を低減するとともに、各送信局の配置の偏りによる測位計算の精度の低下を低減し、従来技術に比較して高精度で測位計算を行う。
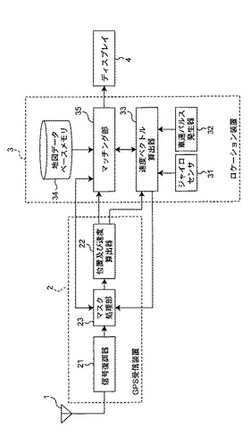
【解決手段】ナビゲーション装置10は、速度ベクトル算出器33と、マスク処理部23と、位置及び速度算出器22と、マッチング部35とを備える。マスク処理部23は、受信無線信号に基づいて、ナビゲーション装置10の進行方向に対する各GPS衛星の相対方位と、各GPS衛星の仰角とを算出し、算出された相対方位及び仰角に基づいて当該各GPS衛星を測位算出に使用しないようにマスクする。位置及び速度算出器22は、マスクされない各GPS衛星から受信した無線信号に基づいて自車位置を算出する。マッチング部35は、所定の地図データと、速度ベクトル算出器33により算出された速度ベクトルと、位置及び速度算出器22により算出された自車位置とに基づいて現在位置を特定する。
(もっと読む)
測位装置、測位装置の制御方法、その制御プログラム及び記録媒体

【課題】静止時及び微速移動時において、信頼性を有し、かつ、精度の高い位置を出力することができる測位装置等を提供すること。
【解決手段】測位衛星からの信号である衛星信号に基づいて、測位を行う測位装置20であって、参照位置Pを保持する位置保持手段と、測位装置20の移動状態を判断する移動状態判断手段と、移動状態に基づいて、参照位置Pと、測位によって算出した現在の測位位置Pg(n)を平均化して平均位置を算出する平均位置算出手段と、平均位置を出力する位置出力手段と、平均位置を参照位置Pとして位置保持手段に格納する位置格納手段と、を有する。
(もっと読む)
位置情報利用装置
【課題】POIへの立ち寄りをより正確に認識し、POIへの立ち寄りをトリガとする車両制御を行うための技術を提供する。
【解決手段】POI認識処理部33は、走行軌跡処理部31及びマップマッチング処理部32により算出された現在位置と、ジャイロセンサ23及びステアリングセンサ24からの検出信号とに基づき、自車両がPOIに立ち寄ったか否かを判定する。そして、自車両がPOIへ立ち寄ったと判定した場合、当該判定の精度に関する認識自信度を算出する。そして、車両制御ECU27は、この認識自信度に応じた動作モードで車載機器に対して当該POIに対応する所定の動作を実行させる。
(もっと読む)
ナビゲーション装置
【課題】有効な省エネルギー運転支援機能を提供することができるナビゲーション装置を提供する。
【解決手段】車両の走行状況を検出するセンサ部と、現在位置を測位するGPS受信部と、地図情報を記憶した地図記憶部と、出力手段と、を備えたナビゲーション装置10において、ナビゲーション装置10は、更に、停車判定部111と、アイドリング情報記録部18と、を備え、停車判定部111は、センサ部15の出力に基づいてアイドリングした状態で車両が所定時間以上停車したことを判定するとともに、GPS受信部12が測位した現在位置の情報および現在位置に基づいて地図記憶部から得た地図情報に基づいてアイドリングの適否を判定し、不適切なアイドリング状態にあることを示すアイドリング情報をアイドリング情報記録部18に記録する。
(もっと読む)
車載用ナビゲーション装置
【課題】旋回走行を要する自走式の駐車場における旋回走行によって、自車方位および自車位置の誤差が発生したとしても、これらの誤差を迅速かつ適切に補正することができ、自車方位精度および自車位置精度を向上させることができる「車載用ナビゲーション装置」を提供すること。
【解決手段】自車位置・方位補正手段29,38により、駐車場における自車両の旋回走行の中心点を回転中心とした回転処理手段37による回転後の所定範囲の走行軌跡を用いて、自車方位の補正および自車位置の補正を行うこと。
(もっと読む)
測位装置、測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】静止時における出力位置の精度を向上させることができる測位装置等を提供すること。
【解決手段】衛星信号S1等に基づいて、測位装置20の測位位置を算出する測位位置算出手段と、測位装置20の移動速度を算出する速度算出手段と、前回測位時からの経過時間が予め規定した許容時間範囲内であり、かつ、前回測位時の移動速度v0が予め規定した第1速度許容範囲内であり、かつ、現在の移動速度v1が予め規定した第2速度許容範囲内であるという静止状態条件βを満たすか否かを判断する静止状態判断手段と、前回測位時の測位位置P0と現在の測位位置P1とを平均化処理して平均位置Q1を算出する平均位置算出手段等を有する。
(もっと読む)
慣性航法装置およびその誤差補正方法
【課題】磁気方位センサの誤差や荒天時の風などの外乱に左右されることなく、より安定して姿勢/方位の初期データの精度を向上させることができる慣性航法装置を実現する。
【解決手段】移動体搭乗者のヘルメットに取付けられたジャイロセンサと加速度計の出力を利用して当該搭乗者頭部の位置や姿勢を求める慣性航法装置において、ジャイロセンサおよび加速度計の出力を補正するセンサ誤差補正計算部と、センサ誤差補正計算部により補正されたジャイロセンサおよび加速度計の出力を利用して頭部の位置や姿勢を計算するとともに、頭部の位置や姿勢の計算結果を補正する航法・姿勢方位計算部と、頭部が静止状態にあるときに航法・姿勢方位計算部より出力される速度データを速度誤差として利用し、センサ誤差補正計算部で使用するセンサ誤差データを校正するとともに、姿勢/位置誤差データを校正する誤差推定計算部とを有することを特徴とする。
(もっと読む)
位置算出装置の進行角決定方法
【課題】 信頼度の高い方位データを用いて、移動体の進行角を決定することができる「位置検出装置の進行角決定方法」を提供する。
【解決手段】 本発明の進行角決定方法は、GPS衛星により測位されたGPS方位および自立航法センサにより測位された航法方位を入力するステップと、入力されたGPS方位の信頼度と航法測位の信頼度を比較し、信頼度が高いと判定された方位データに基づき進行角を算出するステップとを有する。これにより、進行角の誤差が軽減され、位置精度が向上する。
(もっと読む)
自車位置判定装置
【課題】自車位置の判定を高精度に行うことができ、ひいては、ミスマッチングを防止してナビゲーションの際に自車を目的地まで適切に案内することができる「自車位置判定装置」を提供すること。
【解決手段】自車位置の判定を行う自車位置判定装置14であって、捕捉されたGPS衛星の個数が所定数以下の場合に、前記自車位置の判定として自車が屋内に存在する旨の判定である屋内判定を行う屋内判定手段28を備えたこと。
(もっと読む)
測位システム、測位装置、測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】自動車の中の任意の位置において、かつ、使用者の任意の姿勢において使用することができる、車両情報及び衛星電波を使用する測位システム等を提供すること。
【解決手段】車両情報提供装置20は、車両情報を無線で送信する無線送信手段等を有し、測位装置50は、車両情報提供装置20から、車両情報を無線で受信する無線受信手段と、車両情報に基づいて、速度ベクトル情報を生成する速度ベクトル情報生成手段と、車両15の現在の推定位置を示す推定位置情報を生成する推定位置情報生成手段と、衛星電波を使用して測位位置を示す衛星測位位置情報を生成する衛星測位位置情報生成手段と、推定位置と測位位置との平均位置を示す平均位置情報を生成する平均位置情報生成手段と、平均位置情報が生成されている場合には平均位置情報を出力し、平均位置情報が生成されていない場合には推定位置情報を出力する位置出力手段等を有する。
(もっと読む)
移動体のセンサ補正装置、停止判定装置およびその方法
【課題】従来の速度センサを用いて、移動体が停止していることを判定し、停止判定をしている間に閾値を用いて、自立センサのバイアスやドリフト等の誤差を補正する方法では、センサの個体差から適切な閾値を設定することが難しい。
【解決手段】移動体の加速度を検出する加速度センサ11と、加速度センサ11のデータ系列のランダム性を判定する独立性判定手段12と、移動体が走行している路面の傾斜角を算出する傾斜角演算手段13と、加速度センサの補正値を格納する記憶媒体14と、加速度センサの補正値を算出する加速度センサの補正値演算手段15とを備え、移動体の走行状況を正確に判定し、路面の傾斜角を算出することで、閾値を用いなくともセンサを補正することが可能となる。
(もっと読む)
車両の挙動制御装置
【課題】 走行中と停車時にそれぞれヨーレートセンサのゼロ点補正を可能とした車両の挙動制御装置において、適切なゼロ点補正を行うことを可能とした車両の挙動制御装置を提供する。
【解決手段】 車両走行中で走行中のヨーレート補正値(YR0)演算条件が成立した場合には、走行中ヨーレート補正値YR0Mを求め(ステップS11、12)、停止中に停止中のヨーレート補正値(YR0)演算条件が成立した場合には、停止中ヨーレート補正値YR0Sを求める(ステップS15、17)。直近のYR0M補正時点からの経過時間を示すカウンタ値CTが所定のしきい値Thxを越えている場合には、YR0MをYR0Sで置き換える(ステップS18、19)。そして、YR0MとYR0Sとの差の絶対値Ydiffがしきい値Aを越えている場合には、車両挙動制御(ステップS26)の制御しきい値をかさ上げする(ステップS23、24)。
(もっと読む)
ナビゲーション装置及び車両位置修正方法
【目的】 車両が運転手による腕差出動作が行なわれる施設の近くにいることを検出して車両位置を修正する「ナビゲーション装置及び車両位置修正方法」を提供することである。
【構成】 ナビゲーション装置に、車両の位置を検出する車両位置検出手段、車両の窓から運転者の腕を差し出す動作が行われたことを検出する検出手段、車両の窓から運転者の腕を差し出す動作が行われる施設の該腕差出動作が行なわれる場所の位置データを保存する施設データベース、車両の位置を修正する位置修正手段を設ける。位置修正手段は、所定の施設の近くに車両が存在し、かつ、車両の窓から運転者の腕が差し出されたことが検出されたとき、車両位置を該施設の前記場所の位置データで修正する。
(もっと読む)
移動体運動計測装置
【課題】
移動体の運動状態の計測のためのセンサやその算出手段に工夫を凝らして、移動体の運動状態を十分な精度で算出することを図る。
【解決手段】
移動体上の複数箇所に速度ベクトルデータ計測手段を設けて、指定された時間間隔で計測された速度ベクトルデータを使って、前記複数箇所の相互間の距離を拘束条件として前記移動体の運動状態を算出し、その算出された運動状態を前記速度ベクトルデータの計測時刻から指定された遅延時間後に出力する
(もっと読む)
加速度センサの補正装置および加速度センサの出力値補正方法
姿勢角演算器(14)は、加速度センサ(10)の出力値からロボットの姿勢角を演算する。姿勢角比較器(16)は、レジスタ(20)に設定された特定姿勢における姿勢角と検出された姿勢角とを比較し、その差を補正値演算器(18)に出力する。補正値演算器(18)は差を解消するように零点補正器(26)あるいは感度補正器(28)に補正値を出力する。レジスタ(20)に設定される姿勢角は、入力器(22)から設定してもよい。  (もっと読む)
(もっと読む)
角速度センサの零点補正装置および補正方法
ロボット等の運動体に角速度センサ(10)が設けられる。第1設定器(14)は角速度の変化幅が所定幅以下であるか否かで静止状態を判定し、静止判定器(20)は判定時間を超えて静止状態が継続しているか否かを判定する。総和平均器(34)は、静止状態と判定された期間のn個のデータのうち、終了タイミング直前のi個のデータを除いた(n−i)個のデータの総和平均を算出して零点オフセットとする。零点補正器(36)は、出力値を零点補正して出力器28に出力する。 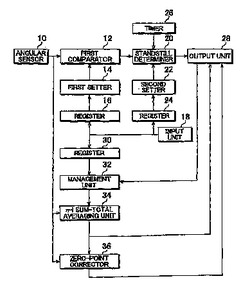 (もっと読む)
(もっと読む)
歩行者ナビゲーションシステム、経路探索サーバおよび携帯端末装置
【課題】 歩行停止中に生じる携帯端末装置の現在位置測位誤差に基づく位置の表示の揺らぎを防止するようにした歩行者ナビゲーションシステムを提供する。
【解決手段】 ナビゲーションシステム10は携帯端末装置20と経路探索サーバ30から構成されている。携帯端末装置20は、表示手段26と、現在位置取得手段23と、GPS測位手段231と、歩行検出手段232と、歩行停止時制御手段25と、を備え、経路探索サーバ30から配信される案内経路データと地図データとに基づいて、表示手段26に該案内経路と、現在位置を含む地図と、現在位置を示す現在位置マークとを表示する。歩行検出手段232が歩行停止を検出した場合、表示手段26に表示される現在位置マークの表示位置を、歩行停止時制御手段25が特定の位置に固定する。
(もっと読む)
車両挙動制御装置
【課題】ヨーレートセンサのゼロ補正ずれによる不適切な挙動制御を防止しつつ、ヨーレートセンサのゼロ補正出力が得られない場合でも適切な挙動制御が行える車両挙動制御装置を提供すること。
【解決手段】ヨーレートセンサ5を用いて車両の挙動制御を行う車両挙動制御装置であって、車両の停止中にヨーレートセンサ5のゼロ点出力を演算し(S30)、車両の走行中にヨーレートセンサ5のゼロ点出力を演算し(S26)、停止中のゼロ点出力と走行中のゼロ点出力との差が所定値を超える場合には停止中のゼロ点出力と走行中のゼロ点出力との差が所定値を超えない場合に比べて挙動制御開始しきい値を高く設定する(S48)。これにより、ヨーレートセンサ5のゼロ点補正が適切に行われていないおそれのある場合には、挙動制御開始しきい値が高く設定され挙動制御に入りにくくなり、不適切に挙動制御が行われることを防止できる。
(もっと読む)
カーナビゲーション装置
【課題】 動作が停止された後に移動されても起動時に正常なナビゲーションを開始できるカーナビゲーション装置を提供する。
【解決手段】 現在の位置を検出する位置検出手段1と、現在向いている方向を検出する方向検出手段2と、位置および方向の少なくとも1つを変更する地点を、変更地点として登録する変更地点登録手段3と、起動時に位置検出手段で検出された位置が変更地点登録手段によって登録された変更地点から所定範囲内にあるかどうかを判断する変更地点判断手段4と、変更地点判断手段によって所定範囲内にあると判断された場合に、位置検出手段で検出された位置を示す値および方向検出手段で検出された方向を示す値の少なくとも1つを、位置および方向の各々に対してあらかじめ定められた変更値に変更する位置・方向変更手段6とを備えている。
(もっと読む)
ナビゲーション装置
【課題】より精度よく現在位置を求める技術を提供する。
【解決手段】ナビゲーション装置は、信号機のある交差点における車両の動作を利用して現在位置を求める。具体的には、ナビゲーション装置は、車両の信号待ち(信号機のある交差点付近での車両の停車)を検出した後、車両の旋回を検出した場合、その交差点において交差する道路であって旋回終了時の車両方位に一致する道路上に現在位置を求め直す。
(もっと読む)
41 - 60 / 68
[ Back to top ]