
Fターム[2F129DD62]の内容
航行(Navigation) (246,646) | 検索/探索 (24,832) | 経路探索の種類 (5,186) | 最短経路 (3,718)
Fターム[2F129DD62]の下位に属するFターム
Fターム[2F129DD62]に分類される特許
1,601 - 1,620 / 2,063
ナビゲーション装置
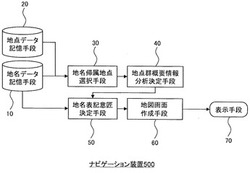
【課題】利用者が地域に関連する施設情報を直感的に把握することができる表示を行うナビゲーション装置を提供する。
【解決手段】地図上に表示された地名が選択された際に、選択された地名に関連する地点の属性情報に基づいて地名を地図上に視覚的に表現する地名表記意匠を作成し、選択された地名と作成された地名表記意匠を含む地図画面を作成して表示する。
(もっと読む)
移動体搭載装置、盗難防止方法、そのプログラム及びその記録媒体

【課題】
車上あらし等による盗難を有効に防止しつつ、利用者の利便性を向上させる。
【解決手段】
車両の駐車終了時刻に基づいて、車両の駐車地点の位置及び地点情報の少なくとも一方と、ナビゲーション機能の動作開始に際して認証操作を要するセキュリティモードを解除するセキュリティモード解除時間帯との関係情報であるセキュリティ解除情報125を、解除時間帯情報更新部117が更新する。そして、駐車地点に関するセキュリティ解除情報が記憶装置120内に登録されている場合には、車両が駐車地点における駐車が終了した時刻が、駐車地点に関するセキュリティ解除情報に基づいて定まるセキュリティモード解除時間帯に入っているときに、セキュリティ制御部116が、セキュリティモードを解除する。
(もっと読む)
買物経路誘導システム
【課題】 ショッピングセンタなどにおいて、ユーザを必要な場所まで誘導するカートロボットを用いたシステムを提供する。
【解決手段】
ユーザの買物経路を誘導するシステムであって、管理サーバは、商品棚位置情報、店舗内のカメラからの混雑情報、およびカートロボットの経路情報を格納し、各情報をカートロボットに送信し、カートロボットは、商品棚位置情報をもとに目的とする棚位置までの距離を最短とする経路計画を生成し、当該経路にしたがってカートを移動させ、曲がり角を検出したときに、ステアリング操作が自動的に行われることを特徴とする。
(もっと読む)
最適航路探索方法
【課題】運航計画時に船舶が固有に有する個船性能データと長期の海気象状況を示す海気象データに基づき、ある海域の出発点から到着点までについて最適航路を演算する際、演算上の船舶の航行に合わせて変化する海気象データを用いる最適航路探索方法を提供することを目的とする。
【解決手段】運航計画時に船舶が固有に有する個船性能データと長期の海気象状況を示す海気象データの予報値とに基づいてある海域の出発点から到着点までの最適航路を最適航路探索アルゴリズムを用いて演算する際、到着点に到達するまで一定時間経過毎に演算上の船舶の航行に合わせて変化する船の位置において、時間的/空間的に変化する海気象データの予報値を用いるようにしたものである。
(もっと読む)
経路探索装置、経路探索方法、経路探索プログラム及び記憶媒体
【課題】経路探索用データのデータ量を過度に増大させることなく、遠距離の経路計算を高速化する。
【解決手段】経路探索装置は、例えばカーナビゲーション装置などに搭載することができ、出発地から目的地へ至る経路探索のための経路探索用データを記憶している。経路探索用データは、探索用ブロックデータと、探索テーブルとを含む。探索用ブロックデータは、地理上の所定のブロック毎に1つ又は複数用意されており、経路探索に用いるリンクを示すデータである。また、探索テーブルは、出発地と目的地の組合せ毎に用意され、当該出発地から当該目的地への経路探索に使用すべき前記探索用ブロックデータを特定するデータである。経路探索時には、出発地と目的地とが決定されると、出発地及び目的地の組合せに対応する前記探索用ブロックデータが決定され、決定された前記探索用ブロックデータを用いて経路探索が行われる。
(もっと読む)
知能型駐車案内装置及び方法
【課題】知能型駐車案内装置及び方法を提供する。
【解決手段】駐車場に進入する車両の番号を認識する映像センサノードと、車両の駐車場進出入如何及び駐車如何を感知するセンサノードと、前記映像センサノードでセンシングされた信号に基づいて車両が駐車予約サービスを申し込んだ車両であるかどうかを判断し、センサノードでセンシングされた信号に基づいて駐車場進入後に駐車可能な空間へ誘導するための情報を生成する駐車総合管理サーバと、駐車予約サービス及び駐車可能な空間へ誘導するための情報を車両の運転手に提供する無線通信端末機と、を備える知能型駐車案内装置。これにより、運転手に目的地まで道路案内サービスだけでなく、目的地所定半径以内に存在する駐車場及び駐車可能余裕空間についての情報を提供して運転手に最適の駐車場を選択可能にし、選択された駐車場の進入後には駐車可能な空間へ誘導して運転手の駐車によるストレスを減少させる。
(もっと読む)
経路探索装置
【課題】トンネルの含まれる領域を個々に指定することなく、トンネルを回避する経路を優先的に探索できるようにする。
【解決手段】出発地から目的地までの各リンクを選択して経路を探索する。トンネルを含むリンクに対してトンネル情報が付与された地図データに基づいて、トンネル情報が付与されたリンクに対するリンク通過コストを大きくして経路コストを算出し(S314、316)、トンネルを含むリンクよりもトンネルを含まないリンクを優先的に選択して経路を探索する。
(もっと読む)
ナビゲーション装置
【課題】様々な状況で推奨経路から逸脱した方がよいか、推奨経路にしたがって走行した方がよいかを判断するに当たり有効な判断材料を提供するナビゲーション装置を提供する。
【解決手段】推奨経路21は、交差点23を右折しているので、交差点23は誘導交差点となる。したがって、交差点23を直進したり左折したりすると、推奨経路21から逸脱することになる。車両が交差点23から所定距離(たとえば、300m)以内に到達すると「ポン、次の交差点を右折してください。」という経路誘導の音声24がスピーカから出力される。さらに、「間違って直進すると30分到着が遅れます。間違って左折すると60分到着が遅れます。」という推奨経路21を逸脱した場合の情報がスピーカより出力される。
(もっと読む)
車載用電子システム及び車載電子装置
【課題】 携帯電子装置が車載電子装置から着脱可能なシステムにおけるユーザの使い勝手を向上させた車載用電子システムを提供する。
【解決手段】 車両に搭載されたオーディオ装置100と、オーディオ装置100に対して着脱自在に装着されるナビゲーション装置200とを有する車載用電子システムであって、オーディオ装置100は、ナビゲーション装置200の接続を検出する検出回路370と、ナビゲーション装置200の接続を検出すると、ナビゲーション装置200の具備する表示部201に、ナビゲーション装置200の表示情報を表示するようにナビゲーション装置200に要求する制御部106と、を有する構成としている。
(もっと読む)
経路探索装置
【課題】予め登録された目的地と経由地を読み出して、前回と同じ目的地へ向かう経路を探索する場合、出発地が前回と異なる場合にも最適な経路を探索することができる経路探索装置を提供する。
【解決手段】外部メモリに目的地Gaとその目的地Gaに関連付けた優先ポイントu1〜u7を登録し、その登録した目的地Gaを外部メモリから読み出して経路探索する場合、経路の出発地(自車位置)によって、目的地Gaに関連付けられた優先ポイントu1〜u7のうち、経由地とすべき優先ポイントを変更する。
(もっと読む)
車両用ナビゲーション装置
【課題】車両用ナビゲーション装置において、ストリート正式名称を入力しても、また、主体名称を入力しても、主体名称の選択指定による、住所検索や交差点検索が可能となるようにする。
【解決手段】番地、ストリート名および市名から目的地を検索(住所検索)する場合、タッチパネルから、ストリート名として、ストリート正式名称の文字列、または主体名称だけの文字列を入力すると、制御回路が、ストリート正式名称の中に、入力された文字列と一致する文字列を有したストリートを検索し、その検索したストリートを表示装置に主体名称文字列によってリスト表示する。この主体名称文字列で表示されたストリートのうちからいずれかのストリートを選択すると、その選択されたストリートと、ストリート名として入力された文字列と、ストリートの入力選択の前あるいは後に入力される市名と、番地とを含む住所を目的地として検索する。
(もっと読む)
目的地案内方法および目的地案内を実行するための装置、ならびに相応のコンピュータプログラムと相応のコンピュータ読出し可能記憶媒体
本発明は、目的地案内方法および目的地案内を実行するための装置、ならびに相応のコンピュータプログラムと相応のコンピュータ読出し可能記憶媒体に関するものである。
ここでは、所要の走行操作に従うと最高の安全性が得られる走行ルートが選択される。ここでは、車両周囲の現在の交通状況に関する情報が評価され、計算された走行ルートから得られる走行戦術の危険性が、少なくとも1つのコンピュータプログラムによる評価結果を使用して評価され、走行指示が評価の関数として出力される。 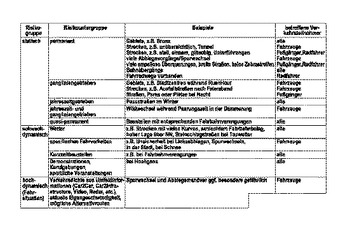 (もっと読む)
(もっと読む)
ナビゲーションシステム、ナビゲーション装置
【課題】立体駐車場や地下駐車場などのように、GPS信号を受信できない場所であり、かつ道路以外の場所において、自車位置の検出精度を向上するナビゲーションシステムを提供する。
【解決手段】GPS受信部14によるGPS信号の受信結果、自車両が道路上を走行しているか否かの判定結果、および自車両の走行速度に基づいて、自車両が立体駐車場や地下駐車場など、GPS信号を受信できない場所であり、かつ道路以外の場所にいるか否かを判定する。このような場所にいると判定した場合は、振動ジャイロ11、車速センサ12および加速度センサ13の検出結果に基づいて自律航法により求められる自車位置候補点と、ミリ波レーダ2による障害物の検出結果とに基づいて、自車位置を特定する。
(もっと読む)
車載用ナビゲーション装置
【課題】実道路状況に即した道路規制案内あるいは安全速度案内を可能とする機能を持つ車載用ナビゲーション装置を提供する。
【解決手段】道路区間に対するマスタ道路規制データを、適用対象となる道路区間と対応付けて記憶するマスタ道路規制データテーブルと、マスタ道路規制データとは別に用意され、マスタ道路規制データに優先して一時的に適用されるべき一時道路規制データを、道路区間と対応付けて記憶する一時道路規制データテーブルとを備え、個々の道路区間について、道路規制データ有効判定参照情報に基づいて、マスタ道路規制データと一時道路規制データとのいずれを適用するかを決定し、決定された道路規制データを出力することを特徴とする車載用ナビゲーション装置として提供可能である。
(もっと読む)
地図表示システム、地図配信サーバおよび地図表示端末ならびに住所特定方法
【課題】郵便番号を用いて所望のエリアの地図画像を表示し、該地図画像の地番情報から特定の地点の住所を入力できるようにする。
【解決手段】地図データベース38が市区町村名・地番情報を含む地図データ381を蓄積しており、郵便番号検索手段39が、指定された郵便番号に応じて地図データベース38から郵便番号に該当するエリアの地図データを読み出し、地図画像表示制御手段27が、該地図データに基づいて、郵便番号に該当する地図画像のエリアを強調して表示手段に表示し、住所特定手段36が詳細エリア選択手段により地図画像上で選択された所望の市区町村名または地番情報に応じた詳細エリアに基づいて該当する市区町村名または地番を住所情報として特定する。
(もっと読む)
ナビゲーション装置およびナビゲーション方法ならびにそのプログラム
【課題】車両の前方の様子を示す実写画像に、道路の形状を示す道路形状ガイド画像を重畳表示する必要性の度合いを判定し、その必要性が高いときにのみ当該道路形状ガイド画像を表示することが可能なナビゲーション装置およびその方法ならびにそのプログラムを提供する。
【解決手段】ナビゲーション装置は、実写案内生成部と、道路形状ガイド生成部と、必要度算出部と、案内制御部とを備える。実写案内生成部は、実写画像を用いて実写案内画像を生成する。道路形状ガイド生成部は、実写案内画像に表示されている道路の形状を示す道路形状ガイド画像を生成する。必要度算出部は、道路形状ガイド画像の表示の必要性の度合いを示す必要度を算出する。案内制御部は、必要度算出部によって算出された必要度に基づいて、実写案内生成部によって生成された実写案内画像に、道路形状ガイド生成部によって生成された道路形状ガイド画像を重畳表示する。
(もっと読む)
移動体の方向推定システム、及び該方向推定システムを備える移動体ナビゲーションシステム。
【課題】本発明は、移動軌跡や地磁気を用いることなく移動体の方向情報を直接的に取得するためのシステムを提供することを目的とする。
【解決手段】本発明は、移動体が移動する平面に無線ICタグを埋設する。該無線ICタグに記憶された座標情報を、移動体が備える2つのアンテナによって同時に2箇所から取得しこれを演算することによって移動体の進行方向を推定する。また、正三角形の各頂点に配置された3つの無線ICタグの信号が発信する無線信号の受信状態を、移動体が備える回転するアンテナによって追跡することによって、該移動体の進行方向を基準とした3つの無線ICタグのそれぞれの方位角情報を演算することによって移動体の進行方向を推定する。
(もっと読む)
ナビゲーション装置
【課題】ユーザが設定した目的地に確実に到達することができるナビゲーション装置を提供する。
【解決手段】ユーザは、地図20の地点21に目的地を設定するために、地図20をスクロールしてカーソルを地点21に合わせる。入力装置を操作して目的地を設定すると、地点21の周辺の周知施設である○○市役所が検索される。地点21には、目的地マーク31が表示され、○○市役所の位置には、仮の目的地マーク32が表示される。そして、○○市役所に至る推奨経路33が探索され、表示される。
(もっと読む)
経路探索装置
【課題】渋滞中の道路を横切る箇所を回避する経路を探索できるようにする。
【解決手段】ノード間を接続するリンク毎の評価値を算出し、出発地から目的地に至るまでの総評価値が小さくなる経路を探索する。経路中に渋滞中のリンクを横切る箇所が含まれるか否かを判定し(S108)、経路中に渋滞中のリンクを横切る箇所が含まれると判定された場合、渋滞中のリンクを横切る箇所が含まれる経路の総評価値が大きくなるように渋滞中のリンクを横切る箇所に対して予め定められた評価値を加算する(S112)。
(もっと読む)
走行制御計画生成システム及びコンピュータプログラム
【課題】自車両の走行方針を満足しつつ、周辺環境の状況変化に柔軟に対応することを可能とする走行制御計画生成システムを提供する。
【解決手段】走行制御計画生成システム1は、車両Aの走行方針に沿う上位計画を生成する上位計画生成手段22aと、上位計画を達成する計画であって、少なくとも走行軌跡を含む下位計画を生成する下位計画生成手段22bと、周辺車両B,Cの少なくとも走行軌跡を含む下位計画を取得する下位計画取得手段16,30と、周辺車両B,Cの下位計画を考慮して、車両Aの下位計画を所定の指標により評価する評価手段24と、評価手段24による評価に基づいて、車両Aが実行する下位計画を選定する下位計画選定手段26と、を備える。
(もっと読む)
1,601 - 1,620 / 2,063
[ Back to top ]