
Fターム[2H011BA41]の内容
焦点調節 (10,117) | 焦点検出(測距)方式 (3,703) | 反射波の時間差を利用するもの (25)
Fターム[2H011BA41]に分類される特許
1 - 20 / 25
撮像装置
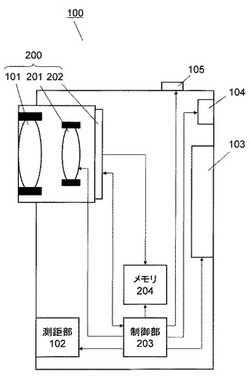
【課題】あらかじめ登録した被写体が撮影者の意図した撮影距離に移動してきた際に自動的に撮影する撮像装置を提供する。
【解決手段】本開示における撮像装置は、被写体の像を形成する撮像光学系と、撮像光学系が形成する光学像を画像信号へと変換して出力する撮像素子とを有する撮像ユニットと、被写体の距離情報を入手する測距部と、画像信号の画像を表示する画像表示部と、撮影する被写体をあらかじめ登録し記録する被写体記録部と、被写体を撮影する距離を指示する距離指示部とを備える。撮像光学系は、距離指示部により指示された距離に対して合焦動作を行う。被写体記録部にあらかじめ記録された被写体が、距離指示部により指示された距離にある時に、撮像ユニットが撮影露光を行う。
(もっと読む)
カメラ

【課題】携行が容易な有毒ガス検出機能を備えた画像撮影用のカメラを提供する。
【解決手段】写真撮影用のカメラSに、撮影目標に対してメタンガスが吸収する波長のレーザ光を送出する補助発光部11と、そのレーザ光を変調する光変調駆動部12と、目標からの反射光を受信する補助受光部13とを組み込み、補助受光部13からの受信信号を復調してメタンガスの吸収からメタンガスの濃度を測定する光復調・ガス検出部14と、所定の濃度を超えた場合にアラームを生成する警報部15と、アラームを通知された場合、LCD7にアラームを表示する制御を行うMPU3とを備える。
(もっと読む)
距離画像カメラおよび距離画像合成方法
【課題】単一の撮像部の画角よりも広い画角を有するとともに距離精度の高い距離画像を得ることが可能な距離画像カメラおよび距離画像合成方法を提供する。
【解決手段】同一方向に向けて配置される複数のカメラユニット10A〜10Dと、これらの制御および取得される複数の距離画像に対する演算処理を行う演算制御ユニット15とを備える。各カメラユニット10は、対象物へ向けて光を照射する発光部11と、照射された光の反射光が戻ってくるまでの時間の測定値から算出される距離情報と前記反射光の強度を示す輝度情報とを画素毎に有する距離画像を取得する撮像部12とを有する。演算制御ユニット15は、第1距離区間探索部、最近接距離区間選択部、第2距離区間探索部、距離情報置換部、2次元位置補正部および距離画像合成部とを有しており、複数の距離画像を合成した際の距離データのばらつきなどを補正する。
(もっと読む)
撮像装置
【課題】正確な測光量が得られ、最適な露光制御が可能となる撮像装置を提供することである。
【解決手段】実施形態に係る撮像装置は、3次元的な領域を測光エリアとして設定し、この測光エリアの測光量に基づいて露光制御を行なうことを特徴とする。
(もっと読む)
撮像装置、撮像方法、及びプログラム
【課題】被写体が平面画像の撮像に適している場合は平面画像の撮像を行い、立体画像の撮像に適している場合は立体画像の撮像を行う。
【解決手段】2つの対物系から入射するそれぞれの物体光により形成される立体画像を撮像する立体撮像部111と、1つの対物系から入射する物体光により形成される平面画像を撮像する平面撮像部112と、少なくとも1つの対物系から入射する物体光により形成される画像に対して所定の画像処理を行うことで画像における被写体の特徴である凹凸情報を抽出する凹凸情報抽出部114と、凹凸情報が所定の条件を満たす場合に立体撮像部111が撮像した立体画像を記憶部117に記録し、所定の条件を満たさない場合に、平面撮像部112が撮像した平面画像を記憶部117に記録する画像記録部116とを備える。
(もっと読む)
電子機器、情報付き撮像画面表示方法及びプログラム
【課題】利用者が直感的に指定し易く、同時に必要な空間情報を重畳表示する。
【解決手段】現実空間を撮影するとき、撮像装置の画角内かつ被写体に対して所定の奥行き範囲にある空間に関する情報だけを自動的に絞り込み、撮像画面上に重畳的に表示する。すなわち、ピントの合った範囲にある事物に関する情報のみを重畳可能な情報として絞り込み、撮像画面上の事物の像に重ねて表示する。
(もっと読む)
撮像装置および方法、並びにプログラム
【課題】より少ない演算量で、ピントが合った画像を得る。
【解決手段】レンズ51aを含む光学系は、レンズ51aより入射される被写体の光に対応する像を結像し、測距イメージセンサ51bは、レンズ51aより入射される被写体の光に対応する信号を撮像画像として出力し、距離情報取得部55は、被写体との距離を取得し、ぼけ補正部60は、距離情報取得部55により取得された被写体との距離に対応する光学系の結像特性に基づいて、測距イメージセンサ51bにより出力される撮像画像に対してぼけ補正する。本発明は、例えば、デジタルスチルカメラに適用することができる。
(もっと読む)
光学的情報読取装置
【課題】簡単な構成で液体レンズによるフォーカス機能とズーム機能を備えた光学的情報読取装置を提供する。
【解決手段】光学的情報読取装置1は、電圧の印加で境界面の形状が変化する液体レンズ20A,20Bが、境界面の形状を変化させることで焦点距離が変化し得る所定の間隔を開けて配置されると共に、少なくとも1個の光学レンズ27が配置されたレンズモジュール2と、レンズモジュール2を透過した光信号を光電変換するイメージセンサ30と、各液体レンズ20A,20Bの温度を検知するサーミスタ26A,26Bと、コード記号5までの距離を測定する測距部31と、測距部31で測定された距離情報と、サーミスタ26A,26Bで検知された温度情報に基づき、フォーカス制御及びズーム制御を行うASIC40を備える。
(もっと読む)
超音波受信モジュール、超音波距離測定システムおよび超音波距離測定方法、並びに書画カメラ
【課題】超音波を利用して距離を測定する超音波受信モジュール、超音波距離測定システムおよび超音波距離測定方法、並びに書画カメラを提供する。
【解決手段】超音波受信モジュール120は、少なくとも1つの超音波信号を受信する超音波受信端130と、超音波受信端130と電気的に接続され、時間の経過とともに増大する所定倍率を提供し、所定倍率により超音波信号の振幅を変更する信号増幅器140と、信号増幅器140と電気的に接続され、時間の経過とともに低減する閾値を提供し、振幅が閾値よりも大きな超音波信号の部分をキャプチャする測定モジュール150とを備える。
(もっと読む)
カメラ装置、その撮影方法と撮影制御プログラム
【課題】フラッシュ撮影においても各部の明るさが自然な状態の画像を得ることを可能とする。
【解決手段】光学系と撮像系とを含むメイン撮影ブロック11aとサブ撮影ブロック11bを備え、フラッシュ撮影時には視差が存在する1組の撮影画像からなるステレオ画像を取得する。画像処理部17は、取得したステレオ画像に基づいて、画角内における被写体の各部までの距離を取得する。さらに取得した距離に基づいて、ステレオ画像の一方の撮影画像を対象として、その画像内全域をカメラからの距離が同一の複数の被写体エリアに区分けし、各被写体エリアに含まれる画素の輝度をカメラからの距離に応じて補正する。その際、主たる被写体の前景部分の被写体エリアに含まれる画素の輝度を下げ、主たる被写体の背景部分の被写体エリアに含まれる画素の輝度を上げ、前景部分の白飛びや背景部分の黒つぶれを改善する。
(もっと読む)
撮像装置
【課題】被写体領域と背景領域との境界を高精細で高速に分割する撮像装置を提供する。
【解決手段】撮像素子と、画像データを生成する画像処理部と、被写界内の所定の情報検出領域に対応した情報を抽出する情報抽出部と、画像データを少なくとも1つの情報検出領域を含む複数の中領域に分割し、異なる中領域の情報検出領域より抽出された情報の類似度に基づいて、画像データを少なくとも1つ以上の中領域から構成される複数の大領域へ分割する第1被写界分割部と、大領域に含まれる中領域の内の大領域どうしの境界に位置する中領域を、少なくとも1以上の画素データからなる小領域に分割し、小領域に含まれる画素データから該小領域の特徴量を算出する特徴量算出部と、特徴量算出部により算出された小領域の特徴量に基づいて小領域を小領域を含む大領域もしくは小領域を含む中領域と接する大領域に含まれるように決定する境界決定部とを有する。
(もっと読む)
三次元ビュー表示用の観察者トラッキング
装置は、1以上の観察者をトラッキングし、1以上の観察者の各々に対して、トラッキングに基づき観察者の位置を判定しうる。加えて、装置は、1以上の観察者の各々に対して、右目用画像と左目用画像で構成され前記位置で見える立体画像を判定しうる。更に、装置は、観察者に関連する立体画像を1以上の観察者の各々に前記ディスプレイを介して提供するためにディスプレイの表示設定を制御しうる。 (もっと読む)
撮像装置
【課題】 被写体の撮像情報と、距離情報を同時にセンサーから出力する撮像装置において、被写体付近の音声端末装置にて入力された信号を、赤外線信号として本体撮像装置に送信する。
【解決手段】 RGBをそれぞれ吸収する膜と近赤外光を吸収する膜を設けたセンサーと、センサー近くに取り付けた赤外発光素子を用いて、赤外発光素子からの照射光が被写体からの反射光をセンサーの各画素の近赤外光吸収膜で捕らえることにより、距離情報を得ると同時に、被写体までの距離が一定以上となる場合、被写体に備えてある、音声入力端末に入力された被写体近辺の音声情報を、赤外信号に変調して撮像装置に送信し、音声の補助とする。
(もっと読む)
カメラ
【課題】本発明は、撮影用の光学系部材の前面を、自動的に破損や汚れから保護することが可能なカメラを提供する。
【解決手段】本発明は、光学系部材により被写体の光学像を結像して撮影するカメラにおいて、上記光学系部材の上記被写体側の表面である前面部から上記被写体方向に存在する物体を検出する検出部と、上記光学系部材の上記前面部を覆う形状を有し、上記被写体方向に対して上記前面部を覆う位置である保護位置と、上記被写体方向に対して上記前面部を露出する位置である開放位置と、の2位置間で移動可能に配設された保護部材と、上記検出部によって、上記前面部から所定の距離以内に存在する物体が検出された場合に、上記保護部材を上記保護位置に移動させる制御部と、を具備する構成とした。
(もっと読む)
測距装置及び測距方法
【課題】撮像素子を駆動するための回路も簡単にすることができ、CPUへの負荷を低減することができる測距装置を提供する。
【解決手段】第1測距装置10Aは、一定間隔で同期信号Saを発生する同期信号発生部24と、強度変調された変調光12を、同期信号Saの入力に基づいて出射する発光手段14と、同期信号Saの入力に基づいて、変調光12により照射された被検出物からの反射光18を受光する受光手段20と、変調光12と反射光18の位相差から被検出物までの距離を算出する演算手段22と、同期信号発生部24から受光手段20への同期信号Saの到達時間を同期信号Saの発生回数に応じて変化させる同期信号制御手段64とを有する。受光手段20は、同期信号Saの入力を基準として一定周期ごとに設定された露光期間において反射光18の光量をサンプリングする。
(もっと読む)
撮像装置、その被写体追従方法及びプログラム
【課題】被写体が移動したとしても精度良く被写体の追従を行う。
【解決手段】CPU24は、追従領域を撮像エリア内に設定し、この追従領域に合わせ込まれた被写体2の追従を行う。CPU24は、タイミング信号Stをフラッシュ制御部14,撮像制御部15、センサ部11の素子駆動部102,103に供給して、各部を駆動する。CPU24は、データ処理部20から取得したカラー画像と不揮発性メモリから取得したカラー画像とを比較し、被写体2の位置の変化を検出し、被写体2の移動後の位置データを取得する。また、CPU24は、データ処理部20から取得した距離画像と不揮発性メモリから取得した距離画像とを比較し、被写体2の位置の変化を検出し、移動後の位置データを取得する。CPU24は、最も信頼性の高い位置データを選択し、選択した位置データに基づいて、追従領域を移動させる。
(もっと読む)
撮影装置および方法並びにプログラム
【課題】TOF方式において測距を行う場合のように、ノイズの影響を受けることなく測距を行うことができるようにする。
【解決手段】デジタルカメラ1を平行移動させつつ撮影を行い、複数の画像を取得する。距離算出部51が、複数の画像に含まれる複数の被写体を認識し、複数の画像間において対応する被写体間の複数の画像内における変位量を算出し、変位量の大小関係に基づいてデジタルカメラ1から複数の被写体までの相対的な距離である被写体距離を算出する。
(もっと読む)
撮影装置および方法並びにプログラム
【課題】TOF方式において測距を行う場合に、被写体距離が大きい被写体であっても測距を行うことができるようにする。
【解決手段】撮像系20が取得した画像に含まれる複数の被写体までの被写体距離を距離算出部51が取得する。光学的距離算出部52が、複数の被写体に光を照射し、光の被写体による反射光を撮像系20により検出し、光が出射されてからその反射光が撮像系20により検出されるまでの時間に基づいて複数の被写体の光学的な被写体距離を算出する。この際に、距離算出部51が取得した被写体距離に基づいて、露出設定部53が反射光を検出する際の撮像系20の露出を設定する。
(もっと読む)
撮像システム、電子機器及び撮像方法
【課題】機器の小型化を図りつつ、特定の被写体に対して正確にオートフォーカスをすることができる撮像システム、電子機器及び撮像方法を提供する。
【解決手段】発信装置1が第1の端子1aを備え、受信装置2が第2の端子27aと、内部時計22、タイミング制御部23と、発信装置1からの超音波を受信した時間t2と第2の信号が出力された時間t1との時間差Δtに基づき発信装置1と受信装置2との距離Lを推定する距離計測部25とを備えているので、例えば発信装置1を受信装置2に装着したときに、第1の端子1aと第2の端子27aとを接続させて、第1の端子1a及び第2の端子27aを介して補正信号を発信装置1に入力し、第1の信号の出力のタイミングと第2の信号の出力のタイミングとの同期を正確にとり、距離Lを正確に推定する。
(もっと読む)
距離画像生成方法及びその装置
【課題】装置の大型化、高コスト化を招くことなく、目的の被写体を的確に検出することによって、その目的の被写体に関して精度の高い距離画像を生成できるようにすると共に距離画像を短時間で生成できるようにした距離画像生成方法及びその装置を提供する。
【解決手段】
カメラ10には2つの撮像部PA、PBが設けられ、撮像部PAと撮像部PBから、可視の波長域の光により結像された画像が取り込まれ、これらの画像によりステレオマッチング法を用いて距離画像Aが生成される。一方、撮像部PBは、赤外光により結像された画像を取り込むことができ、赤外光照射部18から被写体に照射されて反射した赤外光による赤外画像が取り込まれ、TOF法を用いて距離画像Bが生成される。まず、TOF法を用いた距離画像Bが生成され、その距離画像Bにより主要被写体が検出される。そして、検出された主要被写体の画素範囲においてステレオマッチング法を用いた距離画像Aが生成される。
(もっと読む)
1 - 20 / 25
[ Back to top ]