
Fターム[3B150JA03]の内容
Fターム[3B150JA03]に分類される特許
1 - 20 / 438
ミシン
ミシン
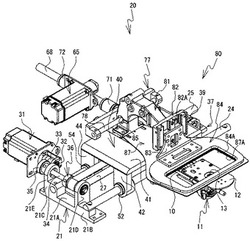
【課題】互いに直交する方向に延びる固定レールの一方を下軸の下方に配置でき、かつ他方を下軸よりも上方に支持する為の部材の設置空間を十分に確保できるミシンを提供する。
【解決手段】X軸固定シャフト24,25は下軸10よりも下方に配置する。X軸移動部材40は脚部42等によって固定台41を下軸10よりも上方に支持する凸型形状を備える。X軸移動部材40は下軸10を除けることができる。故にX軸固定シャフト24,25を下軸10よりも下方に配置できる。X軸固定シャフト24,25よりも短いY軸固定レールを下軸10よりも上方に支持する。Y軸固定レールはX軸移動部材40の上面に支持してある。故にX軸移動部材40をコンパクトにできるので設置空間を確実に確保できる。
(もっと読む)
カットデータ作成装置、カットデータ作成プログラム、およびミシン

【課題】所望するパターンの切れ目を短時間で加工布に形成させるためのカットデータを作成するカットデータ作成装置、カットデータ作成プログラム、およびミシンを提供する。
【解決手段】ミシンは、縫針の代わりに、先端に刃を備えた切断針を複数装着する。CPUは、加工布に形成させる切れ目のパターンを取得する(S11)。CPUは、切れ目のパターン上の任意の点を、針落ち点として特定する(S13)。CPUは、針落ち点に突き刺す切断針を、パターンの方向に基づいて特定する(S15)。CPUは、特定した切断針を順番に加工布に突き刺す場合の連続回数を特定する。CPUは、連続回数が所定の閾値未満である場合、所定値未満である切断針を、直前または直後の針落ち点に突き刺す切断針によって置き換え(S17)、カットデータを作成する(S23)。
(もっと読む)
テープ縫い付け装置
【課題】テープの縫い付けを自動化し、テープ幅の変化に基づいて縫製パターンを変化させて、テープの縫い目の両側のコバを均一化する。
【解決手段】身頃にテープを縫い付ける装置であって、テーブル上に出没し、身頃を位置決めする基準ピン16と、位置決めされた身頃を把持する身頃押え部11、12と、縫製パターンに基いて、身頃押え部を水平一平面に沿って移動させるX−Y送り装置と、身頃上にテープを供給するテープ供給装置3と、縫製パターンに基づいて縫製物にテープを縫い付けるミシン2と、テープ幅の変化に基づいて前記縫製パターンを変化させる制御手段5と、を備える。
(もっと読む)
テープ縫い付け方法及び装置、身頃セット方法及び装置
【課題】靴の身頃にテープを斜めに縫い付ける場合において、靴のサイズのみをバーコードで読み取ってテープ幅を選択してから、身頃の左右及び内外の区別に対応してテープを縫い付けでき、小ロット生産を可能にする。
【解決手段】靴のサイズのみをバーコードで読み取ってテープ幅を選択し、その選択された幅のテープTをテープ供給装置3にセットする。そして、テーブル1にセットされた身頃の左右及び内外の区別を身頃センサで判別し、その判別された身頃に対応するテープ長さ、縫製パターンを選択して、その選択された長さのテープTをテープ供給装置3により身頃に供給するとともに、選択された縫製パターンに基づいてミシン2により身頃にテープTを縫い付ける。
(もっと読む)
生地供給装置
【課題】生地をミシンへ送り込む作業を自動化するような場合にあって、送り込みの途中で生地に弛み皺を発生させることがないようにし、またミシンの針落部に対して生地を真っ直ぐに送り込むことが確実に行えるようにする。
【解決手段】ミシン2の針落部3に向けて連設状に設置される生地テーブル5と、ミシン2へ生地Wを送り込む中間送り機構6とを有しており、中間送り機構6は、生地Wを生地テーブル5上へ押さえ付けながら駆動回転する送りローラ10と、この送りローラ10を生地テーブル5上の生地Wに対して送り方向Xと交差する方向Yで出入り移動させる出入り調節機構13とを有している。
(もっと読む)
ミシン
【課題】縫い代を安定して検出する。
【解決手段】被縫製物を交差方向送る主送り機構20と横送り機構と、被縫製物の縫い代を検出する端部検出装置40,60と、縫い代が目標値となるように横送り機構を制御するミシン100において、端部検出装置は、光源と、複数の受光部が被縫製物幅方向に沿って複数並んで設けられ、被縫製物の側端部により遮蔽された照射光から当該被縫製物の側端部の被縫製物幅方向の位置検出を行う検出素子45,65とを有し、端部検出装置を被縫製物幅方向に沿って移動させるアクチュエータ47,67と、縫い代の目標値の変化に応じて、アクチュエータの移動制御を行う制御部13とを備えている。
(もっと読む)
布端位置検出装置及びミシン
【課題】数本のケバによる電圧変化を無視して加工布の布端位置を簡易な構成により検出すること。
【解決手段】布端位置検出装置は、布端位置に応じた電圧を出力する布端センサ(6)と、前記布端センサに出力された電圧に基づいて前記布端位置を検出する布端センサコントローラ(71)とを有し、前記布端センサコントローラは、布端を挟んで加工布(W)の内側から外側に向う方向において、布端判定用の閾値(Ve)を最初に超える電圧変化が生じた位置を前記布端位置として判定する構成とした。
(もっと読む)
テープ送り出し装置、及びテープ縫い付け装置
【課題】テープ継目部分の排出のための専用手段を不要にし、且つテープ継目部分を指で排出しやすくする。
【解決手段】テープを送り出す装置であって、テープの送り出し方向に間隔を開けて配置され、テープに圧接してテープを送る2つのローラ381・382と、その2つのローラ381・382に対しテープの送り出し方向の上流側に配置され、テープの継目TGを検出するテープ継目センサ303と、2つのローラ381・382に対しテープの送り出し方向の下流側に配置され、テープの有無を検出するテープセンサ305と、を備える。さらに、2つのローラ381・382の間に配置され、テープを切断するメス301を備える。
(もっと読む)
テープ縫い付け方法及び装置
【課題】靴の身頃にテープを縫い付ける場合において、特別な押えを不要にして、コストを安くする。
【解決手段】靴の身頃LI(RO)にテープTを縫い付ける方法であって、
身頃LI(RO)に、縫い始め少なくとも3針以上の縫い目を形成してから、テープの縫い始め予定位置を針下まで供給して、身頃上のテープに、通常の縫いピッチよりも小ピッチで2針以上の縫い目を形成してから、前記通常の縫いピッチで身頃にテープを縫い付けることを特徴とする。
(もっと読む)
テープ送り出し装置、及びテープ縫い付け装置
【課題】1つのモータで2つのローラを駆動してテープを送り出せるようにして、テープの伸びを少なくできるとともに、2つのローラ間にメスを配置できて、テープの排出も容易にする。
【解決手段】テープを送り出す装置であって、1つのモータと、テープの送り出し方向に間隔を開けて配置され、テープTに圧接してテープTを送る2つのローラ381・382と、2つのローラ381・382の回転軸をそれぞれ回転自在に保持するホルダ383と、ホルダ383を挟んで2つのローラ381・382と反対側において1つのモータの駆動軸の回転動力を2つの回転軸に伝達する動力伝達機構39と、ホルダ383を、2つのローラ381・382の間を支点として揺動させ、2つのローラ381・382の一方のみを選択的にテープTに圧接させるローラ切り替え機構330と、を備える。
(もっと読む)
ミシン
【課題】針棒の下端周辺に設けた構成部品の有無に関わらず、作業者が縫製再開時の針落ち点の位置を容易に調整できるミシンを提供する。
【解決手段】縫製中の異常で縫製が中断する場合、CPUは、仮想針落ち点モードに移行し、針落ち点が縫針の直下の本来の位置から所定方向に所定距離だけ離れた位置に位置するように保持体を移動する(S221)。CPUは、移動後の縫製対象物上の針落ち点を仮想針落ち点として視認可能な状態で示す合成画像を表示する(S222)。作業者は、一針後退又は一針前進の指示を入力して(S227:YES、S231:YES)、縫製再開時の針落ち点を指定する(S228、S232)。CPUは、縫製再開指示の入力を検知すると(S226:YES)、通常モードに移行し、縫製再開時の針落ち点が縫針の直下に位置するように保持体を移動する(S242)。ミシンは該針落ち点から縫製を再開する(243)。
(もっと読む)
ミシン
【課題】針棒の下端周辺に設けた構成部品の有無に関わらず、縫製データ作成時に正確な針落ち点を設定できるミシンを提供する。
【解決手段】CPUは、縫製データ作成時に仮想針落ち点モードに移行し、針落ち点が縫針の直下の本来の位置から所定方向に所定距離離れた位置に位置するように、縫製対象物の保持体を移動する(S101)。CPUは、移動後の縫製対象物上の針落ち点を仮想針落ち点として視認可能な状態で示す合成画像をディスプレイに表示する(S103)。作業者は、仮想針落ち点を確認しながら指示を入力し、所望の模様を縫製する為の針落ち点の位置を順に指定する(S104、S106、S111、S113、S117、S130)。CPUは、指示に応じて、仮想針落ち点の座標を実際の針落ち点の座標に変換することで針落ち点を順に設定し、縫製データを作成する(S107、S114、S120、S141)。
(もっと読む)
刺繍枠
【課題】ユーザが容易に角度を合わせることができる回転可能な刺繍枠を提供する。
【解決手段】刺繍枠5は、内枠51、中枠52、及び外枠54が組み合わされて形成されている。中枠52の枠部521には、複数の第一係合部530が設けられている。第一係合部530は、軸方向の一方の端部に設けられた複数の第一端部係合部531と、軸方向の他方の端部に設けられた複数の第二端部係合部とを含む。外枠54は、第二係合部547を備えている。第二係合部547は、コイルバネ549によって中枠52に向かう方向に付勢された突出部552を含む。突出部552が、複数の第一係合部530のいずれか1つに係合されることで、中枠52が、外枠54に対して予め設定された回転角度で係止される。
(もっと読む)
ミシン
【課題】布送り機構を動作するモータを他の用途にも使用することが可能なミシンを提供する。
【解決手段】モータ35は駆動軸36を備えている。駆動軸36は溝カム65とカム68を備えている。動力伝達機構60は溝カム65と送り台33に連結する。溝カム65は駆動軸36が第一角度の範囲で一方向及び逆方向に回動することで、動力伝達機構60を動作する。動力伝達機構60は送り台33に水平方向の動作を付与する。カム68の後側には、移動機構91が設けてある。移動機構91の左側には、第一連結部材93が設けてある。第一連結部材93はカム962が作用するコロ955を有し、移動刃972に連結する。カム68は駆動軸36が第一角度の範囲とは異なる第二角度に回動することで、移動機構91を動作する。移動機構91はコロ955をカム962に近接する近接位置に移動させる。
(もっと読む)
ミシン
【課題】送り歯の送り運動量を容易に調節できるミシンを提供する。
【解決手段】上下送り機構26は偏心機構部40を備える。偏心機構部40は偏心軸支持部70と基台部80を備える。偏心軸支持部70は偏心軸72と回動軸73を備える。基台部80は軸固定穴84と固定穴85を備える。上下送り軸27は軸固定穴84に挿入固定する。偏心軸支持部70の回動軸73は固定穴85に回動可能に軸支する。偏心軸支持部70は固定穴85を中心に回動可能となる。偏心軸72は軸固定穴84に挿入固定した上下送り軸27に対して偏心する。作業者は偏心軸支持部70を回動して軸固定穴84の中心と、偏心軸72の中心との間の距離を変更できる。作業者は上下送り軸27に対する偏心軸72の偏心量を容易に調節できる。故に、作業者は送り歯の上下方向の往復移動量を簡単に調節できる。
(もっと読む)
ミシン及び刺繍枠
【課題】加工布を保持する刺繍枠を移動及び回転駆動が可能なミシンに関し、特に、刺繍枠の回転駆動手段が大型化することを防止するミシン、及び刺繍枠を提供する。
【解決手段】刺繍枠9は、内枠91、中枠92、及び外枠94が組み合わされて構成されている。刺繍枠9は、内枠91と中枠92との間で加工布100を狭持する。ミシンは、刺繍枠9に設けられたモータ947を駆動させて、外枠94に対して中枠92が回転可能である。ミシンに設けられたイメージセンサによってミシンに装着された刺繍枠9を含む領域が撮像される。撮像された画像151から、内枠91に付された標識110が識別され、識別された標識110を用いて、外枠94に対する中枠92の回転角度が検出される。検出された回転角度である検出角度と、予め記憶された枠回転データとに基づいてモータ947が制御され、外枠94に対する中枠92の回転角度が調整される。
(もっと読む)
ミシン
【課題】縫い代を目標値通りに縫製を行う。
【解決手段】被縫製物CU,CDを水平に送る主送り機構20と、被縫製物を被縫製物幅方向に沿って移動させる横送り機構30,36と、縫い代を検出するための端部検出装置40,60と、被縫製物の縫い代が目標値となるように横送り機構を制御する制御装置130とを備え、端部検出装置は反射面12を照射する光源631と、反射面による反射光を受光する複数の受光部が複数並んで設けられた検出素子65と、光源からの照射光を平行光化し、反射面に対して垂直方向又は当該垂直方向に対して被縫製物幅方向に沿った軸回りに傾斜した方向から平行光化した照射光を照射する光学素子632とを備えている。
(もっと読む)
ミシン
【課題】 下糸残量を正確に把握して縫いを実行できるミシンを提供する。
【解決手段】
形状の縫製或いは色替えまでに必要な下糸量を縫い目データ記憶装置2のデータに基づいて算出し、下糸残量測定装置3により下糸残量を測定し、下糸不足予測装置4により下糸不足位置を予測する。下糸残量が下糸量下限値未満の場合、告知装置8にその旨の告知をさせる。下糸残量が必要下糸量よりも大きい場合、通常の縫製と同様に色替え位置で自動停止し、終了する。
下糸残量が必要下糸量よりも少ない場合、停止位置決定装置5は途中停止位置を決定し、ここでミシンの稼働を停止して、下糸残量を再度測定する。
(もっと読む)
二本針ミシン
【課題】アクチュエータを針棒回動台の外部に搭載する。
【解決手段】二本の針棒を支持する針棒回動台15と、二本の針棒を回動させる針棒回動機構30と、二本の針棒を保持するラッチ機構50と、ラッチ機構の保持を解除させる作動部材16と、作動部材の位置切り替えを行うアクチュエータ61と、アクチュエータから作動部材に位置切り替え動作を伝達する差動伝達機構63とを備え、差動伝達機構は、アクチュエータから回動が入力される入力部材631と、回動動作により作動部材に位置切り替え動作を付与する出力部材632と、入力部材から出力部材に回転を反転して伝える伝達体64と、伝達体を針棒回動台の回動中心線回りに周回可能に支持する回動支持体65とを備え、針棒回動機構の駆動源となる回動モータ31をミシンフレームに設け、針棒回動台への回動動作入力時に、針棒回動台への回動角度の半分の回動角度を回動支持体に入力する。
(もっと読む)
1 - 20 / 438
[ Back to top ]