
Fターム[3B150NC11]の内容
Fターム[3B150NC11]の下位に属するFターム
ロータリーソレノイド (5)
Fターム[3B150NC11]に分類される特許
1 - 20 / 133
ミシン
【課題】縫い代を目標値通りに縫製を行う。
【解決手段】被縫製物CU,CDを水平に送る主送り機構20と、被縫製物を被縫製物幅方向に沿って移動させる横送り機構30,36と、縫い代を検出するための端部検出装置40,60と、被縫製物の縫い代が目標値となるように横送り機構を制御する制御装置130とを備え、端部検出装置は反射面12を照射する光源631と、反射面による反射光を受光する複数の受光部が複数並んで設けられた検出素子65と、光源からの照射光を平行光化し、反射面に対して垂直方向又は当該垂直方向に対して被縫製物幅方向に沿った軸回りに傾斜した方向から平行光化した照射光を照射する光学素子632とを備えている。
(もっと読む)
縫目のほつれ止め方法、縫目のほつれ止め装置及び縫目構造

【課題】二重環縫いの縫目に特有のほつれの発生を、針糸及びルーパ糸の付与張力の影響を受けずに有効に防止することができる新たなほつれ止め方法、ほつれ止め装置、及びこれらの方法及び装置によって形成される縫目構造を提供する。
【解決手段】針落ち位置A,Aの後側に糸掛けフック3及びルーパ糸保持体6を配し、該糸掛けフック3及びルーパ糸保持体6を揺動して、夫々の先端のフック部3b及び糸受け部6aをルーパ1に接近させ、フック部3bによりルーパ1が捉えた針糸ループを保持し、側に位置する針糸ループを、針落ち位置Aよりもルーパ1の進出端側に位置させ、糸受け部6aによりルーパ1から縫製生地に延びるルーパ糸を針落ち位置Aよりも前側に位置させて少なくとも1針分の縫製動作を行わせる。
(もっと読む)
ミシン
【課題】ヒッチステッチを防止する。
【解決手段】針棒12を上下動軸心周りに回動させる針棒回動機構30と、針板の下側で糸寄せ部材51により下糸の糸寄せを行う糸寄せ機構50と、被縫製物を水平面に沿って任意の移動方向に移動させて任意の位置に針落ちを行わせる布移動機構80と、縫製データに基づいて布移動機構を制御する制御部90とを備え、当該制御部は、前記移動機構による各針落ちごとの前記被縫製物の移動方向が予め定められた第一の角度範囲である場合には糸寄せ機構による糸寄せを実行し、移動方向が予め定められた第二の角度範囲である場合には針棒回動機構による針棒の回動を実行する。
(もっと読む)
ミシン及びミシンの糸切り方法
【課題】糸切りの際の電力消費の増大を回避できるミシン及びミシンの糸切り方法を提供する。
【解決手段】糸切り信号が入力されてからt5タイミングで逆転ソレノイドをONして布の送り方向を逆転させる。次いで、t8タイミングで糸切りソレノイドをONして上糸及び下糸を切断する。つまり、縫い目の最終針の針落ち点を1針手前と同等の位置に落としてから、上糸及び下糸を切断する。これにより、糸切り後の布の生地裏において縫い目端部に残る上糸と下糸の残り長さを揃えることができる。さらに逆転ソレノイドをOFFした後で、糸切りソレノイドをONするので、逆転ソレノイドのON期間と、糸切りソレノイドのON期間とが重複しない。これにより、糸切り時における電力消費の増大を回避できる。
(もっと読む)
ミシンシステム、押え足収納装置、及びミシン
【課題】複数種類の押え足を保管すると共に、ユーザが選択した模様の縫製に適した押え足を、間違うことなく取出すことを可能とする。
【解決手段】ミシンベッドに装着される補助テーブル23に、縫製する模様に応じて使い分けられる5種類の押え足13を収納する押え足収納装置3を一体的に組込む。5個の収納室28を並んで備える箱状収容部29の上面に、1つの収納室28を開放させる窓部31aを有するカバー部材31を、駆動モータ等により移動可能に設ける。ミシンの制御装置は、ユーザにより模様が選択されると、その模様の縫製に適した押え足13が収納されている収納室28を決定し、当該収納室28の上方に窓部31aを移動させるように開閉機構30を制御する。
(もっと読む)
ミシン
【課題】イサリ量を低減する。
【解決手段】搬送される上布CUと下布CDの終端部をそれぞれ検出する上布と下布の検出手段91、81と、送られる上布のみを押圧する上布送り調節機構9と、送られる下布のみに押圧力を付与する下布送り調節機構5と、布送り機構の送り量と各検出手段の検出タイミングとによりイサリ量を算出する終端部位置算出部51と、イサリ量とそのイサリ量を生じた時の上布と下布の押圧力の差とを対応づけて記録する記録部54と、記録部の二以上の縫製によるイサリ量と上布と下布の押圧力の差との記録から適正な上布と下布の押圧力の差を求め、それ以降の縫製時に適正な上布と下布の押圧力の差を生じるように上布送り調節機構又は下布送り調節機構とを制御する調節制御部51とを備えている。
(もっと読む)
ミシン及びミシンの制御方法
【課題】縫製作業を開始することなく上糸に付加する張力の確認を行うことができるミシン及びミシンの制御装置を提供する。
【解決手段】CPUは、足踏みペダルの位置が踏み返し位置(Pb1)以上踏み返された位置である駆動領域に属するか否かを判断する(S90)。踏み返し位置(Pb1)は、縫製動作のために作業者が足踏みペダルを中立位置(Pn)から踏み込み位置(Pf2)へ操作する方向と異なる方向に設けた位置である。駆動領域に属する場合、CPUは、布押え部材の押え位置への移動を禁止し(S170)、糸調子ソレノイドをONにして上糸に張力を付加する(S180)。作業者は、上糸張力を確認することができる。
(もっと読む)
ミシンの糸供給器
【課題】縫い始めの余分な糸の長さを短くできる、コストを節減したミシンの糸供給器を提供する。
【解決手段】ミシンの糸供給器上には、動力ユニット70を設置し、糸通過軸ユニット30を押して動かし、撥板40の動作を連動し、撥板40が糸挟持ユニット20に分け入り開かせる時、支点と糸掛け板60との間の糸は最も短くなり、また最もスムーズとなり、撥板40が糸挟持ユニット20から退出すると、糸挟持ユニット20はミシン糸1を緊密に挟持し、動力ユニット70は糸通過軸ユニット30を継続して押し、ミシン糸1の張りを締め、支点と糸掛け板60との間の糸は長くなり、糸挟持ユニット20はミシン糸を緊密に挟持する。
(もっと読む)
ミシン
【課題】布押さえ機構と糸切り機構を備えたミシンでミシンの小型化を図る。
【解決手段】ミシンの糸切り機構は、ミシン主軸10に固定し且つ可動刃を移動するように設定した糸切りカム板41と、糸切りカム板と係合可能なコロ部材を有し且つ係合位置と退避位置との間を移動可能な駆動レバー42と、係合位置においてコロ部材が糸切りカム板により変位することに伴う駆動レバーの揺動を可動刃に伝達して可動刃を駆動する糸切りリンク機構39と、駆動レバーを係合位置と退避位置との間に移動させる揺動力発生機構38と、ミシン主軸を駆動するミシンモータ27とを設け、揺動力発生機構と駆動機構68を駆動パルスモータで駆動し、駆動パルスモータと駆動機構と揺動力発生機構とをミシン脚柱部内に配置した。
(もっと読む)
ミシン
【課題】糸切断後の加工布から延びる糸端部の長さを一定にする糸切り機構を提供する。
【解決手段】CPUは、縫製開始か否かを判定し、縫製開始の場合(S1;Yes)、電流値i1の微弱な駆動電流で糸切り用ソレノイドを駆動して(S2)、可動刃を待機位置に保持する。次に、CPUは、実行中の縫製データに基づいて、糸切り指令が入力されたか否かを判定し、糸切り指令が入力された場合(S3;Yes)、糸切り用ソレノイドを待機状態から駆動停止状態に切換える(S4)。
(もっと読む)
穴かがり縫いミシン
【課題】カッタースペースの中心にボタン穴を形成するための針棒の位置の調整を簡易な機構で行うことができる穴かがり縫いミシンを提供する。
【解決手段】支持軸32は、前方に形成した略円筒状の支持台軸部33と、後方に形成した略円筒状のフレーム軸部34とからなる。支持軸32は、支持台軸部33の軸心の中心線と、フレーム軸部34の軸心の中心線とが、互いにずれて形成してある。作業者が支持軸部32を回動させて、支持軸部32の軸心の中心がA1移動すると、針棒支持台31は、針振り機構40によって位置決めされている角コマ45を中心に回動する。針棒支持台31の上端は右側に移動し、角コマ45より下方に位置する縫針11の下端は、作業者が支持軸部32を回動させる前よりもA2だけ左側に位置することになる。従って、作業者は、支持軸32を回動するだけで、針棒支持台31を介して針棒10の位置を調整することができる。
(もっと読む)
ミシンの糸調子装置
【課題】糸調子皿への押圧開放時における上糸張力を安定することができるミシンの糸調子装置を提供する。
【解決手段】糸調子軸18の割り溝185に嵌合する板棒部材29内に、第一糸調子皿22を後方に向けて付勢するバネ295を配置する。バネ295で第一糸調子皿22を後方に向けて付勢することにより、糸切り時又は縫製終了時に駆動ソレノイド30が駆動棒25を開放した際に、第一糸調子皿22と第二糸調子皿23とを離間する。
(もっと読む)
ミシンの糸調子装置
【課題】上糸への張力の大きさに応じて弾性部材のバネ定数を変化することで、幅広い張力域において上糸に安定して張力を付与できるミシンの糸調子装置を提供する。
【解決手段】皿押え部材19の弾性部材21と接触する接触面193を、テーパ形状に形成する。皿押え部材19と弾性部材21とが互いの接触面193,211が傾斜した状態で接触するので、上糸9への張力が低いときは皿押え部材19と弾性部材21の接触面積が小さくなり、弾性部材21のバネ定数が小さくなる。上糸9への張力が高いときは、皿押え部材19と弾性部材21の接触面積が大きくなり、弾性部材21のバネ定数が大きくなる。
(もっと読む)
ミシン
【課題】布送り方向に沿った布端に沿って適切に縫い目を形成する。
【解決手段】針板14上の被縫製物C1,C2に下方から接して送り動作を行う送り歯1と、被縫製物に上方から接する押さえ足19と、送り歯による送り方向に交差する方向について被縫製物の縫い目に沿った端部の位置を移動調節する端部調節機構と、被縫製物の端部が所定位置にあるか否かを検知する検知手段24,25と、端部調整機構を、検知手段が端部ありと検知した場合に検知手段から離れる方向に移動制御し、検知手段が端部なしと検知した場合には、当該検知状態が継続する時間又は送り距離について定めた閾値を超えるまで端部なしの検知が継続した場合に、被縫製物が検知手段から離れる方向に移動するよう制御を行う制御手段13とを備えている。
(もっと読む)
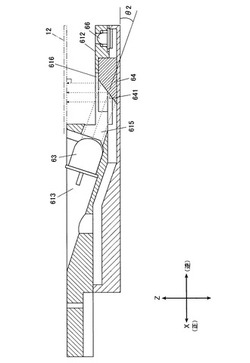
ミシン
【課題】糸切断後に生地に残る残糸を残さず除去する。
【解決手段】縫い針11を保持する針棒12と、針棒を上下動させる針上下動機構と、縫い目形成後に上糸を切断する糸切り装置と、糸切り装置による被縫製物C側の切断後の残り糸を被縫製物から除去する残糸処理装置60とを備え、当該残糸処理装置は、残り糸を被縫製物の下面に直接対向する位置で切除する残糸処理メス66,67と、残り糸を残糸処理メス側に吸引する吸引手段79とを備えている。
(もっと読む)
ミシン
【課題】縫い開始位置に残る上糸端部を残さず除去する。
【解決手段】縫い針11を保持する針棒12と、針棒を上下動させる針上下動機構と、縫い目形成後に上糸を切断する糸切り装置と、糸切り装置の切断により縫い針側に残った上糸端部U1を保持するクランプ機構30と、クランプ機構に保持された上糸端部を被縫製物Cの第一針目の針落ち位置で切除する上糸処理装置40とを備え、上糸処理装置は、上糸端部を被縫製物から切除する上糸処理メス44と、上糸処理メスを保持すると共に当該上糸処理メスを被縫製物の上面に対向させるメス駆動手段46とを備えている。
(もっと読む)
上下送りミシン
【課題】布の段部の片倒れを防止する。
【解決手段】布送り方向に沿って、ガイド板20と、上側ローラ7及び下側ローラ3と、上側検出手段25及び下側検出手段24と、送り足2及び送り歯1とが並び、各検出手段の検出結果に基づいて各被縫製物C1,C2の側端部が所定位置となるように各ローラの駆動手段を制御する制御手段13とを備える上下送りミシン100において、制御手段が、各被縫製物の段部Dが各ローラ位置を通過する際に、上側昇降手段による上側ローラの接離移動を繰り返し行わせる動作制御を行っている。
(もっと読む)
繊維強化複合材料用プリフォームの縫合装置及び縫合方法
【課題】幅が変化する形状のプリフォームの場合にも生産性を向上できるようにする。
【解決手段】移送方向Rへのプリフォーム11の移送に伴い、作業幅領域S1に対応するプリフォーム11の幅(移送方向Rと直交する方向のプリフォーム11の長さ)が変化して(作業幅領域S1の幅が変化して)或るステッチ針16が作業幅領域S1から外れた場合、第1支持ブロック15及び第2支持ブロック20が下動されてステッチ針16及び第1接触プレート211が実線で示す作業位置から鎖線で示す退避位置に切り換え配置される。又、糸ガイド33が実線で示す作業位置から鎖線で示す退避位置に切り換え配置されると共に、第2接触プレート411が実線で示す作業位置から鎖線で示す退避位置に切り換え配置される。
(もっと読む)
自動糸切りミシンの縫い始め糸引張装置
【課題】自動糸切りミシンの縫い始め糸引張装置の提供。
【解決手段】本発明は自動糸切りミシンに運用される縫い始め糸引張装置であり、既存の縫い糸張力調整と糸弛緩装置に糸引張電磁石及び連接棒機構を付加し、並びにミシンモータのコントローラで該糸引張電磁石と糸弛緩電磁石の交替動作を制御し、毎回縫製開始時に揺動糸掛けを駆動し、縫い始め点の上糸を上に引き戻し、並びに毎回縫製終了時に自動糸切り後の糸弛緩電磁石の動作を利用し、該揺動糸掛けを復帰させる。これにより、縫い始めの糸の端長さの短縮を達成すると共に、手作業で縫い始めの糸端の余分の長さを切除する作業を省略できる。
(もっと読む)
ミシン
【課題】糸切り動作を適正且つ安定して実行させる。
【解決手段】ミシンモータ1により糸切断を行う糸切り装置30と、糸切り装置とミシンモータを制御する制御手段100と、主軸角度を検出する位置検出器14,15とを備え、糸切り装置は、糸切りカム51と、糸切りカムのカム溝51aに係合するカム従節体52と、カム従節体に連動する動メス31と、カム従節体を係合状態に切り替える糸切りソレノイド56と、釜押さえ13とを備え、制御手段が、速度設定手段で定められた回転速度に応じて、糸切りソレノイドによるカム従節体の連結状態への切り替え動作が一定の主軸角度Aで完了するように駆動開始タイミングを制御する。
(もっと読む)
1 - 20 / 133
[ Back to top ]