
Fターム[3B151BA15]の内容
Fターム[3B151BA15]に分類される特許
1 - 11 / 11
全鋼製針布のための実装装置
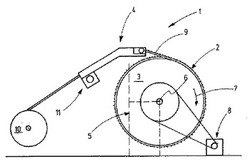
【課題】プロファイル・ワイヤが装着されているときに有効な、改良された力の測定を特徴とする実装装置を提供する
【解決手段】実装装置1の実装アーム4は案内装置11に保持されるとともに、案内装置の案内方向は装着するドラム3の回転軸と平行している。作用力測定装置がプロファイル・ワイヤ9の引張力を検出するために設けられ、作用力測定装置は実装アームに作用する全体の力を少なくともワイヤの長さ方向で検出する。この際、プロファイル・ワイヤに作用している基本的にすべての力、すなわちブレーキ装置の制動力、同様に他の装置、例えば、アライメント装置、チルト装置等の制動力が検出される。
(もっと読む)
スライバを形成する装置
本発明は、コーミング機械のコーミング箇所(1)において形成された繊維フリース(V)からスライバ(F1)を形成する装置であって、繊維フリース(V)がローラ対(17,30)のクランプ箇所(31)に供給され、該ローラ対(17,30)は、駆動装置に接続されたローラ(17)と押圧ローラ(30)とから成っていて、搬送方向(F)で見て繊維フリース(V)はクランプ箇所(31)の後ろでまとめられ、ホッパ(39)を介して、駆動装置(G,M)に接続されたプレスローラ対(K)に供給される形式のもの関する。このような形式の装置において、装置を簡単化するため及び誤ったドラフトを回避するために、繊維フリース(V)は、搬送方向(F)で見て、ローラ対(17,30)のクランプ箇所(31)の後ろで、駆動されるローラ(17)の周面(U)の領域において、ホッパ(39)と後続のプレスローラ対(K)とに引き渡され、該プレスローラ対(K)の一方のプレスローラ(K1)が、駆動されるローラ(17)に回動不能にかつ同軸的に配置されている。  (もっと読む)
(もっと読む)
撚線形態の繊維材料を引き伸ばす練篠機構を有する紡績用前処理機のためのまたは該前処理機における装置

【課題】空間が限られる場合に簡素な手段により間隔センサの配置を可能とし、且つ、検知対象表面に対する間隔センサの優れた結合または協働を可能にする。
【解決手段】装置は、一方のローラは移動不能に配置され且つ他方のローラは該一方のローラから離間移動可能に配置されると共に相互に当接して押圧されるべく配置された一対の測定ローラと、各ローラの内の一方のローラのための保持要素に対して結合された対応表面(検知対象表面)からの間隔を測定する非接触式間隔センサとを有しており、間隔センサ(9、25;47;57、571、572;60)は、ローラ(7、8;15、16;42、43)のための保持要素(52、52b、53a、53b)に対して一体化される。
(もっと読む)
撚線形態の繊維材料を引き伸ばす練篠機構を有する紡績用前処理機のためのまたは該前処理機における装置
【課題】空間が限られる場合に簡素な手段により間隔センサの配置を可能とし、且つ、検知対象表面に対する間隔センサの優れた結合または協働を可能にする。
【解決手段】装置は、一方のローラは移動不能に配置され且つ他方のローラは該一方のローラから離間移動可能に配置されると共に相互に当接して押圧されるべく配置された一対の測定ローラと、各ローラの内の一方のローラのための保持要素に対して結合された対応表面(検知対象表面)からの間隔を測定する非接触式間隔センサとを有しており、間隔センサ(9、25;47;57、571、572;60)は、他方のローラ(7、8;15、16;42、43)のための保持要素(52、52b、53a、53b)に結合され、且つ、間隔センサ(9、25;47;57、571、572;60)および対応表面(53';59)は、各保持要素(52、52b、53a、53b)の側面であって相互に臨むという側面上に夫々配置される。
(もっと読む)
コーマ機
【課題】トップコームがフリースに突き刺さる際に、フリースが下方へ湾曲するように押されることを抑制し、繊維のピーシングをより円滑にする。
【解決手段】ニッパーフレーム14は、ニッパーシャフト22の往復回動によって、クッションプレート15の先端部15aがデタッチングローラ12に対して接近・離間するように前後に揺動する。ニッパーフレーム14にはトップコーム16及び所定のタイミングで開閉されるニッパーナイフ25が設けられている。トップコーム16は、励振手段により振動され、少なくともトップコーム16の先端部がフリースFに刺さる時点から刺し終わり時点まで振動される。
(もっと読む)
繊維束をコーミングのために繊維分類もしくは繊維選択する装置
【課題】簡素で生産性を増大し得ると共に優れたコーミング済みスライバを実現し得る装置を提供すること。
【解決手段】供給された織物繊維から成る繊維束をコーミングのために繊維分類もしくは繊維選択する装置が、供給手段(8;10、11)の下流に繊維束(16;301〜303)に対する挟持デバイス(18、19、20;21、22、23)を備え、回転可能に取付けられた少なくとも2つのローラ(12;13)が配置され、挟持デバイスは、各ローラの周縁部の領域において離間されて分布されており、測定された値を処理し得る制御/調整デバイス(42)であって夫々の場合に少なくとも1つの機能を実施すべく接続された要素(30;43〜47;49)に対して電気信号を発し得る制御/調整デバイス(42)には、機械関連値および繊維関連の技術的な値を検出するための測定対象値センサ(29、31、32;34、34a、34b;41)が接続される。
(もっと読む)
回転シリンダまたはカード用フラット上に配設された繊維処理針布を研磨するフラット・カードまたはローラ・カード上の装置
【課題】送り込みの間および研磨の間において少なくとも一個の研磨要素と繊維処理針布との間の接触(研磨強度)を確実に検出かつ監視する。
【解決手段】回転ローラまたはカード用フラット上に配置された繊維処理針布を研磨するフラット・カードまたはローラ・カード上の装置であって、少なくとも一個の研磨要素と、該研磨要素を上記針布に当接して位置決めする役割を果たす送り込みデバイスとを備える研磨機器を有する装置において、送り込み度合いおよび研磨強度が検出可能である。特に送り込みの間および研磨の間において少なくとも一個の研磨要素と繊維処理針布との間の接触(研磨強度)を確実に検出かつ監視し得るために、上記研磨機器に対しては高感度の構造物音センサが組み合わされ、且つ、電子的評価器は構造物音から、上記少なくとも一個の研磨要素と上記繊維処理針布との間における接触の強度を決定し得る。
(もっと読む)
テキスタイル繊維綿から綿巻体を形成するための装置
綿巻体を特にコーミング機のために形成するための巻取り装置のプレス圧を制御するための構成的及び製作技術的な費用を減じるためには、巻取り装置1の巻取りローラ2,3の回転数制御装置10から巻綿の巻上げられた綿長さのための長さ信号を導き出し、巻綿体の内々の長さ区分を経験的に内々のプレス圧に対応させることが提案された。 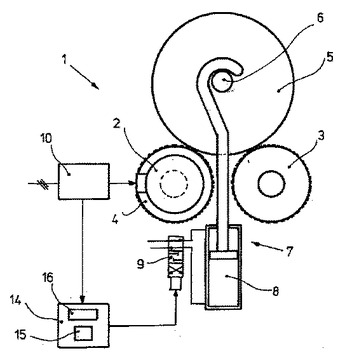 (もっと読む)
(もっと読む)
回転位置駆動装置を有する櫛機械
本発明は、円形の櫛を有する櫛機械に関する。このような櫛機械の作動機構を設定できるかまたはそれらの設定をチェックできるようにするために、櫛機械またはその円形の櫛(2)を所定の回転角位置に移動させることができる装置が設けられている。この装置は、回転位置センサ(9)、目標とする回転角位置を入力するための選択装置(11)、選択装置の回転角目標位置と回転位置センサの回転角実際位置とを比較するための比較装置(10)、および櫛機械の駆動装置を作動させるための制御装置(14)からなる。比較装置(10)は、2つの値に差があった場合、その差を低減するための設定指示を櫛機械の駆動モータ8に与える。  (もっと読む)
(もっと読む)
特にフラット・カード、ローラ・カード、精選機などの紡績機械においてローラ上に針布を引張り装着する装置
【課題】負荷が変化した場合に必要とされ得る引張り装着処理のチェックを安定させる。
【解決手段】特にフラット・カード、ローラ・カード、精選機などの紡績機械において引張り装着デバイスを用いてローラ上に針布を引張り装着する装置において、上記紡績機械は電子制御/調整デバイスを有する。設備に関して簡素であると共に引張り装着処理および/または測定データのチェックを可能とする装置を提供するために、上記引張り装着デバイスに対しては引張り装着の間において検出されたデータを登録する測定デバイスが組み合わされ、且つ、該測定デバイスは上記紡績機械の上記電子制御/調整デバイスと協働し、上記測定デバイスと上記制御/調整デバイスとは単方向的および/または双方向的にデータを交換し得る。
(もっと読む)
ヤーン処理装置の制御方法
伸張−破断プロセスにおいてヤーン(Y)を処理するために使用される少なくとも2つの別々に制御可能なロールセット(22、26、34、56)の各々を開始または停止するための方法であって、各ロールセットが、少なくとも2つのロールを含んでなり、本方法が、伸張−破断プロセスにおいて処理されているヤーン(Y)の同時完全破損を最小にするように、所定のシーケンスに従って、かつ他のロールの少なくとも1つの速度の変化と協調して、各ロールの速度を初期条件から定常状態条件に変える、各ロールセットの工程によって特徴づけられる方法。  (もっと読む)
(もっと読む)
1 - 11 / 11
[ Back to top ]