
Fターム[3B201CC12]の内容
液体又は蒸気による洗浄 (28,239) | 後処理 (1,950) | 水切り、乾燥 (1,160) | 気体噴射 (494)
Fターム[3B201CC12]に分類される特許
481 - 494 / 494
半導体パッケージ製造工程用切断及びハンドラシステム
半導体パッケージ製造工程用切断システムが開示されている。この切断システムは、オンローダー装置と、切断装置と、洗滌装置とが順次に配置されて、前記半導体ストリップが、前記オンローダー装置と、切断装置と、洗滌装置とに、工程進行方向に沿って順次に伝えられながら個別の半導体パッケージに切断するので、半導体ストリップの切断及び処理速度を向上させる。  (もっと読む)
(もっと読む)
固体物品とりわけ光学物品を清浄化するための組成物、およびその様な物品を清浄化する方法
本発明は有機物汚れで汚染された物品用の清浄液に関し、次のものから構成される:
−(A)重量で50%以上、好ましくは重量で60%以上、より好ましくは重量で70%以上および最も好ましくは重量で80%以上の少なくとも1つのラクトン;
−(B)8から15の範囲のHLBを持つ少なくとも1つの界面活性化合物。
(もっと読む)
インサイチュ膜スタック処理のための方法及び装置
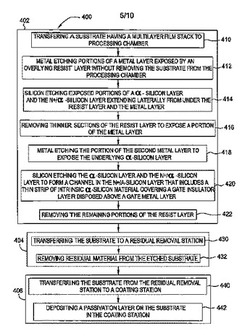
膜スタックを処理するためのクラスタツール、処理チャンバ及び方法の実施形態が提供される。一実施形態においては、膜スタックのシリコン層と金属層をインサイチュエッチングするための方法であって、処理チャンバ内で膜スタックの金属上層をエッチングして下にあるシリコン層の一部を露出させるステップと、処理チャンバから基板を取り出さずにシリコン層におけるトレンチをエッチングするステップと、を含む前記方法が提供される。本発明は、フラットパネルディスプレイの薄膜トランジスタ製造に特に有用である。 (もっと読む)
蒸気圧縮式空調または冷凍システム洗浄組成物および方法
本発明は、蒸気圧縮式空調または冷凍システムから残留物を除去または低減するのに適した、1,1,1,2,2,3,4,5,5,5−デカフルオロペンタンとポリオールエステルとから本質的になる組成物、およびその組成物を用いる方法に関する。 (もっと読む)
ロボットアーム型自動洗車装置
自動車車両をロボットアームの先端に装着した車両洗浄回転ブラシで自動的に洗浄する方式のロボットアーム型自動洗車装置は、車両左側洗浄ロボットアーム110へ装備する車両左側洗浄回転ブラシ111で主に車両左側を、及び車両右側洗浄ロボットアーム120へ装備する車両右側洗浄回転ブラシ121で主に車両右側を、車両実測サイズ測定装置である車両前面撮影用カメラ150・車両左側面撮影用カメラ153・車両右側面撮影用カメラ159・車両後面撮影用カメラ155・車両上面撮影用カメラ157でそれぞれ撮影して作成する車両画像データを車両自動
洗車装置主制御装置102で分析することで測定した車両実測サイズデータを入力データとして、車両自動洗車装置主制御装置102でそれぞれのロボットアームの先端に装備した車両洗浄回転ブラシを自動的に制御しながら車両洗浄処理を行うロボットアーム型自動洗車装置である。
(もっと読む)
基板付着物除去方法および基板乾燥方法並びにそれら方法を用いた基板付着物除去装置および基板乾燥装置
流体を帯状に吐出可能なスリット部が形成されたエアーナイフユニットを用いて、基板の主面に付着した付着物を基板の主面から除去する方法で、基板に対して複数のエアーナイフユニットを相対移動させながら、エアーナイフユニットと基板の主面との間に、前記移動方向と直交する方向に略均一な形状を有する流体導入路を形成し、前記エアーナイフユニットの後部に形成されたスリット部から流体を流体導入路に向けて吐出し、次いで、流体導入路を通過させてエアーナイフユニットの前部に対向して形成される壁面あるいはみかけ上の壁面に導き、さらに、流体導入路より大きい流路断面積を有してエアーナイフユニットと壁面との間に形成された流体導出路を介して、基板に付着した基板付着物が前記流体とともに基板の主面から遠ざかるように導出する。 (もっと読む)
基板洗浄方法、基板洗浄装置およびコンピュータ読み取り可能な記録媒体
ウエハWを略水平姿勢で所定の回転数で回転させながらその表面に所定流量で純水を供給してウエハWをリンス処理した後に、ウエハWへの純水の供給流量を低減し、かつ、純水供給点をウエハWの中心から外側へ移動させる。こうして純水供給点の略外側で液膜を形成しながらウエハWをスピン乾燥処理する。 (もっと読む)
ワークピースを処理するためのシステム
処理ヘッドアッセンブリとベースアッセンブリを含むワークピース処理システムであり、処理ヘッドアッセンブリは処理ヘッドと上部ロータを有し、ベースアッセンブリはベースと下部ロータを有している。ベースおよび下部ロータは磁石を備え、この磁石が生成する磁力により、上部ロータは下部ロータと係合可能であり、係合した上下のロータは、処理を受けるために半導体ウエハーが配置される処理チャンバを形成する。ワークピースを処理する処理流体は、処理ヘッドがワークピースを回転させる間に、処理チャンバへ任意に導入される。加えて、処理チャンバの周りと、処理チャンバを通過する気流により、ワークピース上に加わるパーティクルが低減される。  (もっと読む)
(もっと読む)
基板搬送装置及び基板搬送方法、露光装置及び露光方法、デバイス製造方法
投影光学系と液体とを介したパターンの像によって露光された基板を搬送する基板搬送装置は、前記基板を支持する基板支持部材と、前記基板支持部材と、前記基板の裏面のうち少なくとも一部の領域との少なくとも一方に付着した前記液体を除去する液体除去機構とを備える。 (もっと読む)
基板処理装置、基板処理方法、及び基板保持装置
本発明は、半導体ウエハや液晶基板などの基板を回転させながら、薬液処理、洗浄処理、乾燥処理を行う基板処理装置および基板処理方法に関する。本発明はまた、半導体ウエハなどの基板を回転させながら保持する基板保持装置に係り、特に、洗浄装置やエッチング装置などに好適に使用される基板保持装置に関する。本発明の基板処理装置は、基板を回転保持する基板保持部を有し、基板を回転させて基板に流体を供給して処理を行い、前記基板保持部には前記流体を吸引する保持部吸引部が配置されている。また、本発明の基板保持装置は、基板の端部に当接して該基板を回転させる複数のローラを備え、複数のローラは基板の半径方向に沿って移動する。
 (もっと読む)
(もっと読む)
基板処理方法

【課題】薬液よる基板の薬液処理後、純水処理時における基板表面へのパーティクルの転写を抑制する。
【解決手段】ウエハWに洗浄処理を行う基板処理方法において、フッ酸(HF)等の薬液を貯溜した第1処理槽11にウエハWを浸漬させつつ薬液によりウエハWに薬液処理を行う薬液処理工程と、塩酸(HCl)を含む液体を第2処理槽21へ供給し、第2処理槽21を塩酸を含む液体により洗浄する処理槽洗浄工程と、第2処理槽21へ純水(H2O)を供給し、薬液処理工程で薬液処理されたウエハWを第2処理槽21に貯溜された純水に浸漬させつつ純水によりウエハWに純水処理を行う純水処理工程と、を有する。
(もっと読む)
基板の乾燥方法
【課題】 効率的でかつ廉価な基板の乾燥方法を提供する。
【解決手段】 リンス処理(リンス工程 S1)後、まず、窒素による圧送により、ウエハ20が配置された密閉処理容器12に残留した超純水等の水分が密閉処理容器12の下部から排出される(リンス液排出工程 S2)。つぎに、低温状態下にある密閉処理容器12内に窒素を高速で吹き込んで、密閉処理容器12内に残存する超純水等を吹き飛ばして排出する(残存液除去工程 S3)。つぎに、IPA蒸気を同伴した窒素を密閉処理容器12内に供給する(残存液置換工程 S4)。最後に、密閉処理容器12内を大気圧未満の所定の圧力に減圧しながら、窒素を密閉処理容器12内に吹き込んで乾燥を終了させる(乾燥工程 S5)。
(もっと読む)
ロボットカメラメンテナンスボックス
【課題】 ロボットカメラにこびりついた汚れを効果的に除去し、かつ、短時間で一連の清掃作業を遠隔操作で行う。
【解決手段】 ロボットカメラに対向する位置に設置する筐体と、該筐体を設置場所に固定する脚とを有するロボットカメラメンテナンスボックスであって、前記筐体前面に設けられた開閉自在の扉と、前記筐体上部に設けられ、液体を噴射するウォッシャーノズルと、ロボットカメラのハウジングに設けられた前面ガラス面を洗浄する洗浄ブラシと、前記洗浄ブラシによる洗浄後のガラス面を乾燥させる乾燥手段と、前記筐体内部に設けられ、前後左右に動き、かつ前記洗浄ブラシ及び乾燥手段を支持する支持腕部材とを具備するものである。
(もっと読む)
容器の連続洗浄装置
【課題】 連続的に搬送されてくる個々の容器内部を衛生的かつ有効に洗浄し、引き続き水切り乾燥まで連続的に行なうことができる容器の連続洗浄装置の提供。
【解決手段】 容器を洗浄室内へ受け入れる受け入れコンベアと、該受け入れコンベアにより洗浄室内で受け入れられた容器を、その受け入れコンベアと共に洗浄位置まで上昇させ、さらには洗浄後の容器を受け入れコンベアと共に初期位置へ降下させる昇降機構と、該昇降機構の動作で上記コンベアと共に洗浄位置まで上昇された容器を、その両側方から挟持しながら、天地逆に反転するクランプ反転機構と、該クランプ反転機構により反転された容器の内外面を湯洗及びリンス洗浄する洗浄機構と、該洗浄機構による洗浄が終了された容器の内面及び外面の水切りを行なうエアブロー機構を有する。
(もっと読む)
481 - 494 / 494
[ Back to top ]