
Fターム[3C007AS12]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 機械加工(例;研磨、切削) (95)
Fターム[3C007AS12]に分類される特許
1 - 20 / 95
加工ロボットの軌道追従装置と方法
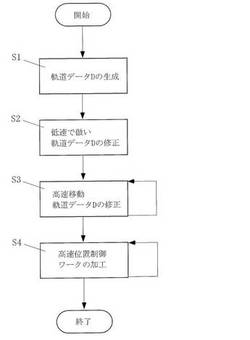
【課題】従来の倣い制御または力制御による加工速度を超える高速で、ロボットアームの追従遅れなしに、高精度の加工をすることができる加工ロボットの軌道追従装置と方法を提供する。
【解決手段】(A)ワークのCADモデルから軌道データを生成して記憶装置に記憶し、(B)加工前に、軌道データに沿って、加工速度より低速の倣い速度で、ワークを加工することなくワークを倣い、その動作位置から軌道データを修正して目標軌道を設定し、(C)次いで、目標軌道に基づき、ワークと接触させることなく加工速度で加工工具を位置制御して、軌道データを再修正する学習を繰返して加工に使用する目標軌道データとして記憶し、(D)加工時に、学習後の軌道データに基づき、加工速度で加工工具を位置制御してワークを加工する。
(もっと読む)
加工ロボットの軌道追従装置と方法

【課題】従来の倣い制御または力制御による加工速度を超える高速で、ロボットアームの弾性変形や加工工具の減耗の影響なしに、高精度の倣い加工をすることができる加工ロボットの軌道追従装置と方法を提供する
【解決手段】(A)ワーク1のCADモデルから軌道データDを生成して記憶装置24に記憶し、(B)軌道データDを目標軌道として加工工具3を位置制御するとともに動作中の加工反力を計測しておき、(C)加工後に、計測した加工反力の計測値から目標押付力で動作するように目標軌道を修正する学習を実施し、この加工と学習を繰返す。
(もっと読む)
粗倣い制御を行うロボットの制御装置
【課題】形状が未知の部分や障害物等がワークに存在する場合でも、ロボット、作業ツール及びワークに対して過大な負荷をかけることなく、なるべくワークの形状に沿った迅速な倣い制御を可能とするロボット制御装置の提供。
【解決手段】ロボット制御装置14は、ツールとワークとの間に作用する力を検出する力検出手段16と、ロボット12の動作切り替えの判定及びパラメータ調整を行う動作切り替え判定・動作パラメータ調整部34と、動作切り替え判定・動作パラメータ調整部34による動作指令に基づいて、ロボット12に送る指令を演算する指令演算部36とを有する。
(もっと読む)
レーザ加工ロボットの教示方法及び教示装置
【課題】レーザ加工ロボットの教示作業を容易且つ正確に行えるようにする。
【解決手段】測定レーザと加工レーザとを出力するレーザスキャナを有し、加工レーザをワークに照射してレーザ加工を行うレーザ加工ロボットの教示方法が、ワーク上の基準照射位置を基準として予め定められた基準図形に基づき測定レーザをワーク上に照射する際に、測定レーザの照射位置を制御する制御手順S4と、レーザスキャナから照射された測定レーザが、ワークにおいて反射された反射光を測定する測定手順S5と、反射光と基準図形を比較し、基準照射位置におけるワークの表面の傾斜を算出する傾斜算出手順S6と、傾斜算出部が算出した傾斜から前記ロボットの姿勢に関する教示データを作成するデータ作成手順S7と、を有する。
(もっと読む)
加工ロボット及びその重力補償方法
【課題】重力補償の精度を高め、かつ、計測動作時において工具とワークとの衝突を避け、さらに、計測時間を短縮することを可能とした加工ロボット及びその重力補償方法を提供する。
【解決手段】外力を計測する力センサ15を備えた工具12を用い、加工中に工具12に作用する加工反力を計測しながらワーク1を加工する加工ロボット10の重力補償方法であって、加工軌道をCAMによって生成し、ワーク1の加工前に、加工軌道と干渉しない範囲で準備した計測軌道において、工具12を加工時の姿勢で動作させ、その際の力センサ15の計測値をオフセット値として記憶し、ワーク加工時に、加工軌道上の同一の姿勢におけるオフセット値を、加工中の力センサ15の計測値から差し引いて、加工反力を算出し、加工反力を用いて、工具12の押付力を制御しながらワーク1に倣って加工する。
(もっと読む)
工具保持構造、加工用ロボット、及び加工用ロボットを用いた加工方法
【課題】非常に簡単な構成で、被加工物の加工位置に多少のばらつきがあっても、加工用ロボット側の加工位置にテーチング内容を変更することなく、面取り等の加工ができる加工工具保持構造、加工用ロボット、及び加工用ロボットを用いた加工方法を提供する。
【解決手段】加工工具13を先端に取り付ける回転工具10と、該回転工具10を支持する支持部材24との間に弾性体22を設けて、該弾性体22の弾性力により、前記加工工具13の位置を前記支持部材24に対して予め設定した位置Pcに戻す復元力を発揮させる加工工具保持構造1において、前記回転工具10側と前記支持部材24側との間に前記弾性体23のみで連結される部分を設けて、前記回転工具10を前記弾性体23を介して前記支持部材24で支持することを特徴とする加工工具保持構造。
(もっと読む)
力制御ロボットのキャリブレーション装置と方法
【課題】ロボットの設置精度が低い場合でも、その設置誤差を考慮して、必要なパラメータをキャリブレーションすることができる力制御ロボットのキャリブレーション装置と方法を提供する。
【解決手段】3次元動作するロボットアーム1の手先に力センサ3を介してツール4が取り付けられている。ロボット制御装置14によりロボットアーム1を複数の姿勢に動作させて力センサ3の計測値と、前記計測値を取得するときの力センサの姿勢データとを取得し(S1,S2)、演算装置16によりツール重量、重力方向ベクトル、ツール重心位置ベクトルを含む複数のパラメータを算出する(S3,S4)。
(もっと読む)
ロボットによるバリ除去方法
【課題】ロボットに取り付けた工具を位置制御により移動させてワークの大型のバリ取りを行う際に、位置制御のための膨大なティーチング作業を省くことができる、ロボットによるバリ取り方法を提供する。
【解決手段】ディスプレイ19aの表示画面上で選択されたワーク15のCADデータから、そのワーク15の設計上の形状(表面形状)を示す設計上の形状データを生成する。また、生成した形状データを用いて、ワーク15のロボット1に対する実際の方向と設計上の形状とを示す位置姿勢データを生成する。そして、生成した位置姿勢データで示される位置姿勢のワーク15の表面に沿って、エンドエフェクタ23,25を位置制御により移動させる。
(もっと読む)
教示データの修正システム
【課題】加工ワークの形状が変化する場合に簡易に教示データの修正が行える教示データの修正システムの提供。
【解決手段】教示点を修正する教示データの修正システムにおいて、第一の加工ワーク13を加工するための教示点に関するパラメータを記憶する記憶手段と、第一の加工ワークとは形状の異なる第二の加工ワーク14に関する画像と教示点の画像とを重ね合わせて表示をするとともに、ポインティング手段で表示画面中の位置を指定できる表示手段と、ポインティング手段で教示点に関するパラメータが変更された際に、ポインティング手段で示される表示画面中の位置と変更前の教示点の位置とに基づいて、変更後の変更教示点に関するパラメータを算出する算出手段と、記憶されたパラメータを、変更後の変更教示点に関するパラメータにより更新する更新手段と、更新後の変更教示点と第二の加工ワークに関する画像とを重ね合わせて表示させる制御手段と、を具備する。
(もっと読む)
加工ロボットとその加工制御方法
【課題】 工具をワークに押付けながら加工する場合において、工具の切れ味が変化してもワークの加工寸法への影響が小さく、かつ工具の交換頻度を下げることができる加工ロボットとその加工制御方法を提供する。
【解決手段】 外力を計測する力センサ15と、工具12と、工具を3次元空間内で移動可能なロボットアーム16と、加工データを記憶しロボットアームを制御するロボット制御装置20とを備える。ワークの加工開始時(B)に、工具12の送りを停止して、所定の押付け力及び工具の動作速度で工具12をワーク1に押付け、工具12がワーク1に所定の深さまで切り込むまでの加工速度を計測する。次いで、ワークの加工時(C)に、前記加工速度から工具の送り速度、押付け力、又は工具の動作速度を補正してワーク1を加工する。また、工具が劣化し、加工速度が予め設定した限界加工速度に達したら、加工後に工具を交換する。
(もっと読む)
加工ロボットとその重力補償方法
【課題】工具をワークに押付けながらワークを加工することができ、かつ加工中に工具の姿勢を変えても、力センサの直線性誤差、他軸感度誤差、及び回転工具の回転によるコリオリ力の影響を低減して高精度な加工制御ができる重力補償方法を提供する。
【解決手段】外力を計測する力センサを有しワークを加工する工具と、工具を3次元空間内で位置と姿勢を移動可能なロボットアームと、加工データを記憶しロボットアームを制御するロボット制御装置とを備える。ワークの加工前に、工具とワークとを接触させずに、工具を加工軌道に沿って加工時の送り速度及び姿勢で動作させ、その際の力センサの計測値をオフセット値として記憶する。次いで、ワークの加工時に、加工軌道上の同一の送り速度及び姿勢におけるオフセット値を、加工中の力センサの計測値から差し引いて、加工反力を算出し、この加工反力を用いて、工具の押付力を制御しながらワークに倣って加工する。
(もっと読む)
ツイストスライド機構及びロボット
【課題】スライド動作の俊敏性を低下させずにツイスト動作の俊敏性を向上させることが可能なツイストスライド機構及びロボットを提供する。
【解決手段】本発明のロボット10は、平行に配置された1対のボール螺子機構40,40における1対のベース駆動用ボールナット42,42を旋回ベース30と連結させた構成とすることで、それらボール螺子機構40,40を駆動する1対のベース駆動用サーボモータ81,81によって旋回ベース30のスライド駆動とツイスト駆動の両方を行うことができる。また、それら1対のベース駆動用サーボモータ81,81が共に固定ベース11に固定されているので、スライド動作の俊敏性の低下させずにツイスト動作の俊敏性を向上させることが可能になる。
(もっと読む)
遠隔操作型アクチュエータ
【課題】 細長いパイプ部の先端に設けられた工具の姿勢を遠隔操作で確実かつ精度良く変更することができ、しかもパイプ部としてのスピンドルガイド部が湾曲した状態でも姿勢変更させられて、全体構成がコンパクトな遠隔操作型アクチュエータを提供する。
【解決手段】 スピンドルガイド部3の先端に先端部材を姿勢変更自在に取付け、先端部材に工具を回転自在に設ける。スピンドルガイド部3の内部に、工具回転用駆動源41の回転をスピンドルに伝達する回転軸22と、姿勢変更用駆動源42で進退動作させられて先端部材を姿勢変更させる姿勢操作部材31とを設ける。姿勢変更用駆動源42の回転を減速する減速機構43と、減速された出力を回転運動から進退運動に変換する動作変換機構44Aと、この動作変換機構44Aの出力により姿勢操作部材31を進退動作させる出力部材51とを設ける。
(もっと読む)
加工方法及び加工装置
【課題】断面積が大きな長尺のワークであっても、材料の無駄を低減して加工できると共に、複雑形状の多品種の部品を加工することが可能な加工装置を提供する。
【解決手段】加工装置1は、長尺のワークWを把持及び解放すると共に、ワークを把持した状態ではワークを変位させることなく一の姿勢に保持する把持装置20と、回転工具の主軸を備え、把持装置からワーク前端部Eを突出させた状態で把持装置に把持されているワークを、主軸に取り付けられた回転工具で加工すると共に、加工済みのワーク前端部をワークの未加工部分から切り離す多軸ロボット40と、把持装置から解放されている状態のワークを、長軸方向に前進させるワーク送り装置30とを具備する。
(もっと読む)
高速高精度な接触作業に適用するロボット制御システム、ロボット制御方法、ロボット制御装置、およびプログラム
【課題】 高速高精度な接触作業に適用するロボット制御システム、ロボット制御方法、ロボット制御装置、およびプログラムを提供すること。
【解決手段】制御装置600は、ロボットのワークの位置、姿勢、力制御値、およびモーメント制御値についての目標値を取得して格納する目標値格納部626と、目標位置および目標姿勢を読出し、切換え行列を適用して力を反映させ、さらに滑り摩擦や慣性力などの外力の除去を含む位置姿勢制御部628とを含み、自由空間と、拘束空間との間の制御力・運動の非干渉化を含む位置姿勢制御部628および力・モーメント制御部630とによって制御出力統合部634からロボットの関節に対する制御信号を生成させている。これらによって,高速高精度なロボットアームの点接触、線接触、面接触のすべての接触作業に適用する位置、姿勢、力及びモーメントの制御技術を提供する。
(もっと読む)
加工ロボットシステム
【課題】流体圧シリンダ装置を介して加工工具とワークとを押し付けながら加工を行う加工ロボットシステムにおいて、過負荷を防止するとともに加工の品質及び信頼性を向上させる。
【解決手段】加工ロボットシステム102は、ロボット手先部16に支持された加工工具92に加わる力及びモーメントを検出する力覚センサ90と、所定の制御パラメータに従ってロボット14及び流体圧シリンダ装置22を制御するシステム制御装置100とを備える。システム制御装置は、力覚センサの検出データに基づいて、倣い作業中に加工工具とワークとの間に作用している作用力を算出し、作用力に応じて手先部の目標軌道、目標移動速度及び流体圧シリンダ装置の目標押圧力を調整する。また、流体圧シリンダ装置が変位させる物体に作用する重力及び慣性力が流体圧シリンダ装置に及ぼしているシリンダ影響力を算出し、シリンダ影響力を補償するように目標押圧力を調整する。
(もっと読む)
カッティングプロッタ
【課題】キャリッジを移動可能に支持するガイドレール等に曲がりが発生していても、当該曲がりによる切削加工の品質劣化を防止できるカッティングプロッタを提供する。
【解決手段】シート状の被加工媒体を支持する加工テーブルと、加工テーブルに支持された被加工媒体の上方に設けられ被加工媒体の切削加工を行うエンドミルと、加工テーブルの上方に設けられ、エンドミルを前後、左右、または上下に移動可能に支持するガイドレール31、Yバー32及び切削駆動機構と、エンドミルを前後、左右、または上下に移動させて被加工媒体を切削加工するように制御するコントロールユニット50とを備えたカッティングプロッタにおいて、ガイドレール31及びYバー32の曲がりを検出するキャリッジ形状測定機構100を備え、検出されたガイドレール31及びYバー32の曲がりに基づいて加工具の移動方向を補正する制御が行われる。
(もっと読む)
遠隔操作型アクチュエータ
【課題】 細長いパイプ部の先端に設けられた工具の姿勢を遠隔操作で変更することができ、工具を高速回転させて切削加工することができ、パイプ部の組立性および量産性が良好な遠隔操作型アクチュエータを提供する。
【解決手段】 細長形状のスピンドルガイド部3と、その先端に姿勢変更自在に取付けられた先端部材2と、スピンドルガイド部3の基端が結合された駆動部ハウジング4aとを備える。先端部材2は、工具1を保持するスピンドル13を回転自在に支持する。スピンドルガイド部3は、スピンドル13に回転を伝達する回転軸22を有する。スピンドルガイド部3内に、回転軸22を回転自在に支持する回転軸支持部材26と、この回転軸支持部材26を固定状態に支持する固定支持部材30,34と、これら回転軸支持部材26と固定支持部材30,34間の隙間寸法を調整する隙間調整手段51とを設ける。
(もっと読む)
ワーク加工装置とその制御方法
【課題】鋳鉄等の硬い材質のワークを加工する場合に、衝撃的な加工反力が発生しても加工精度を維持しかつ工具の破損等を防止することができるワーク加工装置とその制御方法を提供する。
【解決手段】3次元的に移動可能なロボットハンド4に取り付けられ、これに作用する外力を検出する力センサ12と、力センサに取り付けられワーク1の外面を倣う倣い部材15を有する倣い治具14と、倣い治具に取り付けられワークを加工する加工工具16と、倣い治具のワーク外面に対する倣い治具押付力Fallを予想される加工反力Rの最大値よりも大きい値に力制御する加工制御装置20とを備える。倣い部材14でワーク1の外面を倣いながら倣い治具14をワークの外面に沿って移動し、加工工具16によりワーク1を加工する。
(もっと読む)
遠隔操作型アクチュエータ用ナビゲーションシステム
【課題】 外郭がパイプ状で細長形状のスピンドルガイド部の先端に設けられた工具支持用の先端部材の姿勢を遠隔操作で変更できる遠隔操作型アクチュエータに対し、その工具の位置を推定するナビゲーションシステムを提供する。
【解決手段】 遠隔操作型アクチュエータ5は、スピンドルガイド部3の先端に姿勢変更自在に取付けられた先端部材2と、この先端部材2に回転自在に支持された工具1とを備える。ナビゲーションシステムは、工具用マーカに対する工具1の加工部の相対位置を記憶する工具・工具用マーカ相対位置記憶手段54と、先端部材2の回動角度毎に、本体用マーカ7Aに対する工具用マーカの相対位置および姿勢を記録した相対関係記憶手段55と、実操作時の本体マーカ7Aの姿勢および位置、並びに先端部材2の回動角度とから、工具加工部位置推定手段56が工具1の加工部の位置を推定する。
(もっと読む)
1 - 20 / 95
[ Back to top ]