
Fターム[3C007AS22]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 農林水産業用(例;果実採取) (10)
Fターム[3C007AS22]に分類される特許
1 - 10 / 10
ロボットシステム及びロボット制御装置
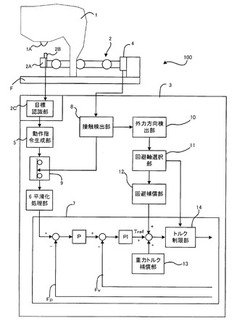
【課題】ロボットアームと周囲の対象物との接触等で生じる外力を低減することができるようにしたロボットシステム及びロボット制御装置を提供する。
【解決手段】ロボットアーム2と、ロボットアーム2に設けられロボットアーム2を駆動させる1以上のアクチュエータ41A〜47Aと、ロボットアーム2とアクチュエータ41A〜47Aとの少なくともいずれかにかかる外力を検出するセンサ部4と、アクチュエータ41A〜47Aの動作を制御するとともに、センサ部4の検出結果に基づいてアクチュエータ41A〜47Aへのトルク指令値を制限するコントローラ3と、を有して構成する。
(もっと読む)
自律型ロボット及び自律型ロボットを複数用いる協調作業システム

【課題】作業領域での作業時間を考慮し、複数の自律型ロボットが協調して作業する自律型ロボット及び自律型ロボットを複数用いる協調作業システムを提供し、作業効率を最適化する。
【解決手段】複数の雑草群Zが存在する圃場Hにて雑草群Zを順に移動して除草作業を実施する除草ロボット10は、現在位置から雑草群Zまでの距離を評価距離とし、前記雑草群Zの雑草面積とし、雑草群Zと、該雑草群Zの最も近い、他の除草ロボット10が除草作業を実施している雑草群Zとの距離を分散距離とし、前記評価距離のみ正負の異なる係数を用いる該評価距離と前記雑草面積と前記分散距離との線形結合を評価値とし、該評価値に基づいて次に除草作業を実施する除草作業領域である雑草群Zを選定する。
(もっと読む)
木材搬送装置
【課題】構造の簡素化を図り、製造コスト及びメンテナンスコストの軽減を実現し得る木材搬送装置を提供する。
【解決手段】木材2の長手方向に離間した少なくとも2つの部位を個別に保持する保持手段8を備え、当該保持手段8は、前記木材2をその長手方向と直角な方向から挿入可能な間隔で配設されると共に互いに平行を成す一対の棒状の保持部材13,13を有し、当該一対の保持部材13,13を、各保持部材13,13に平行な軸線Yを中心に一体的に回動可能に構成した。
(もっと読む)
画像認識方法および把持装置
【課題】分岐点を有するワークの形状を、迅速、且つ、簡易に認識することのできる画像認識方法および把持装置の提供。
【解決手段】分岐点を有するワークを撮像し、二値化し、二値化画像からワークの下端を検出し、ワークの下端からワークの輪郭を追い、輪郭線が急に方向変化する点を分岐点と判断する画像認識方法において、二値化画像から、X方向の最大値、X方向の最小値、Y方向の最大値、およびY方向の最小値を抽出し、これらを辺に有する方形領域を定め、方形領域に属する端点を候補点とし、候補点からワークの下端を判定することを特徴とする画像認識方法および当該方法を実施するための把持装置。
(もっと読む)
把持装置およびその制御方法
【課題】把持したワークの姿勢および幅方向の把持位置を迅速に補正して次工程へ受け渡すことのできる把持装置およびその制御方法の提供。
【解決手段】対向する一対の把持爪と、把持爪と直交して設けられた対向する一対の補正部材と、これらに駆動系の動力を伝達する伝達部材を備えた把持装置であって、把持爪が把持したワークに、補正部材を進出動して当接させることでワークの姿勢を補正する姿勢補正機能を有することを特徴とし、好ましくは、ワークの姿勢が補正された状態からさらに補正部材を進出動させることでワークの幅方向の把持位置を補正する把持位置補正機能を有することを特徴とする把持装置およびその制御方法。
(もっと読む)
受渡装置および受渡システム
【課題】連続的に搬送される分岐点を有するワークに対する作業を可能とする受渡装置および受渡システムの提供。
【解決手段】分岐点を有するワークを掴持する掴持手段と、掴持手段を回動させる回動手段と、掴持手段の回転中心軸上ないしは回転中心軸上から僅かにずれた位置におけるワークの存在を検出するセンサ手段と、分岐点の方向を検出し、分岐点が所定の方向となるための回転角度を算出する回転角度算出手段とを備え、回動手段により掴持手段を所定の角度回動し、掴持手段が掴持したワークを回転角度算出手段が算出した回転角度回動させることで、ワークの向きを揃えることを特徴とする受渡装置およびそれを備えた受渡システム。
(もっと読む)
植物の対象部分の位置特定方法とその方法による対象部分の位置特定装置及びその装置を用いた作業用ロボット
【課題】 変化する光環境下においても収穫すべき果実などの位置特定が素早くできる方法を提供する。
【解決手段】対象部分の全色系のカラー画像から特徴的な色を固有色として選択する固有色選択工程と、その固有色の色データを明暗に関する色要素を除いた二つの色要素から色彩空間データを得る色要素2元化処理工程と、その色彩空間データをモニタ画面に表示してさらに特徴的な少数の色を選別してこれを色彩パターンデータとして記憶させる色彩パターン登録工程と、実作業において、作業すべき対象部分が存在する周辺をデジタルカメラで撮影し、その撮影した全色系のデジタルカラー画像から、明暗に関する色要素を除いた二つの色要素の色彩空間データを得る作業域色要素2元化処理工程と、その色彩空間データと記憶されている色彩パターンデータとを照合し、作業域の画像中に両者が合致した部分のみを位置表示させる対象部分位置表示工程とで構成される。
(もっと読む)
作業車両のアーム型作業機
【課題】農用作業車両の複数箇所にロボットアームを装着可能に構成し、ロボットアームにより複数の作業を円滑に実行する。
【解決手段】縦軸(22c)回り及び横軸(22d)回りに回動自在な第一アーム(23)と、この第一アーム(23)の先端部に屈折自在に連結している第二アーム(24)とでロボットアームを構成する。ベース部材(22)に前記第一アーム(23)を前記縦軸(22c)回りに回動自在に支持し、トラクタ(1)の機体前側部と左右側部にベース部材(22)の取付部(21a,21b)を設け、第二アーム(24)の先端部に複数の補助作業装置(26,…)を取り付け可能に構成する。
(もっと読む)
球状農作物の把持機構
【課題】 ゴム材で細長風船状に形成された複数本のフィンガーを備え、フィンガー内部への圧力流体の供給によってフィンガーを内向きに屈曲変形させるよう構成した球状農作物の把持機構において、補強糸を合理的に巻き付け装着して、耐久性を低下させることなくフィンガーを適切に屈曲作動させて球状農作物を良好に把持することができるようにする。
【解決手段】 フィンガー12の外向き周面に、フィンガー長手方向に略等ピッチで屈曲する蛇腹部25を形成するとともに、フィンガー12の内向き周面に、蛇腹部15の外向き山部15aに対向する複数の横長凹入溝26を並列形成し、蛇腹部25の外向き谷部25bと横長凹入溝26に亘って、フィンガー12の内向き周面より突出しない太さの補強糸27を一連に巻き付け装着してある。
(もっと読む)
脆弱物の把持装置
【課題】 障害物が密集した場所やインビトロ等の狭い作業空間において、脆弱物を把持および/または切断するためのロボットハンドの提供。
【解決手段】 一対の把持爪と、把持用アクチュエータと、把持用アクチュエータおよび把持爪とを連結する把持力伝達系とを備え、前記把持力伝達系の一部または全部が弾性特性を有する材料からなり、前記把持用アクチュエータの駆動により前記把持力伝達系および/または前記把持爪に撓みを生じさせながら脆弱物を把持するロボットハンド。
(もっと読む)
1 - 10 / 10
[ Back to top ]