
Fターム[3C007BS26]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 複腕型マニピュレータ (334)
Fターム[3C007BS26]の下位に属するFターム
人間型マニピュレータ (108)
Fターム[3C007BS26]に分類される特許
221 - 226 / 226
位置決めユニット及びこれを用いた位置決めアーム
例えば内視鏡を用いた外科手術において、手術用具を挿入するために人体に開設した穴を押し拡げることなく、かかる手術用具の先端を体内において処置が必要な部位へ位置決めするユニットを提供する。このユニットは手術用具等の可動部材に対して枢動自在に接続されると共に互いに平行に且つ往復動自在に設けられた第1及び第2の出力軸と、この第1の出力軸に対して任意の進退量を与えると共に、前記第2の出力軸に対しては第1の出力軸の進退量と常に一定比率(≠1)の進退量を与える駆動手段とから構成されている。 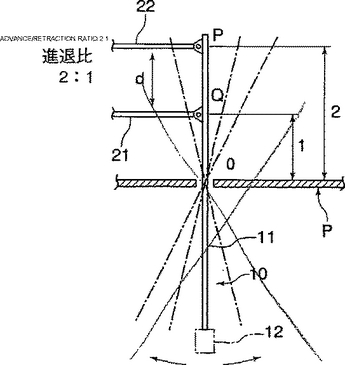 (もっと読む)
(もっと読む)
部品組付け方法

【課題】双腕ロボットの双腕を協調動作させることによって生産性の向上を図ることのできる部品組み付け方法を提供する。
【解決手段】双腕ロボット1の一方の腕(アーム3)が一つの部品を保持または組み付けをおこなっている際には、該双腕ロボット1の他方の腕(アーム4)は他の部品を保持するなどして該他の部品の組み付け準備をおこなうことや、一方の腕(アーム3)が一つの部品を保持または組み付けをおこなっている際には、該双腕ロボットの他方の腕(アーム4)も該一つの部品の保持または組み付けを同時におこなうことによる部品の組み付け方法である。
(もっと読む)
駆動装置及びその駆動方法

【課題】 オープンループ制御により、精確な動作が可能な駆動装置及び駆動装置の制御方法を提供する。
【解決手段】 駆動制御部10から出力される制御信号に基づいて、ドライバ11から所定の駆動信号が出力されて駆動源15を動作させる。駆動制御部10による制御動作が終了すると、振動制御部12が駆動源を一定期間に正逆方向に交互に駆動させるような駆動制御信号を発生する。これにより駆動源15は微振動する。駆動源の微振動による駆動力方向の力が、摩擦力等の負荷により抑制され最後まで動作できずに残存している駆動力と合算されて、駆動方向の力が摩擦等の負荷よりも大きくなると、動作部は残存駆動力に応じた距離だけ移動する。これにより、駆動制御部10の制御信号に基づく動作が精確に実行される。
(もっと読む)
二重スカラアーム
基板搬送装置は駆動セクションと該駆動セクションに作動自在に結合されたスカラアームとを有し、該駆動セクションは該スカラアームを作動する。該スカラアームは上方アームと少なくとも1つの前方アームとを有している。該前方アームは該上方アームに作動自在に搭載されてその上に基板を保持することが可能である。該上方アームは実質的に剛性であって該上方アームの所定の形態の変更を調整することが可能である。  (もっと読む)
(もっと読む)
ロボットとその位置決めの方法
本発明は、ロボットと該ロボットの位置決め方法に関する。本発明の目的は、ピック・アンド・プレース作業を迅速に、エネルギー的に有利に行うことの出来るロボットの提供である。この目的のために、本質的に、水平に配置されたロボット・アーム(24,26)がその両端で、小寸法の回転ピン(30)で接続され、これにより、アーム(24)の第2の端部は、回転駆動装置(22)に回転自在に接続される。アーム(26)の第2の端部は、効果器(28)を有している。回転駆動装置(22)に接続された回転ピン(20)は、回転自在に設けられまた他の回転駆動装置(16)を有する機体(18)に接続されている。これにより、両回転ピン(10,20)は、互いに距離を置く形で位置している。  (もっと読む)
(もっと読む)
ワークハンドリング装置
本発明のフークハンドリング装置は、ワークを載せるトレイを担持すると共に所定方向に往復動自在な可動テーブル(21)、ワークに対して所定の処理を施す処理部(30)を略中央に挟むようにしてトレイと処理部との間で往復動自在に配置され,かつ,ワークを搬送するべく水平方向及び鉛直方向に駆動される関節型アーム(410)及びその先端に設けら
れた複数の吸着ヘッド(420)をそれぞれ有する一対のハンドラ(40,40’)、一対のハンドラ及び可動テーブルを駆動制御する制御ユニット(70)を備え、制御ユニットは、トレイから処理部への未処理ワークの搬入動作及び処理部からトレイへの処理済みワークの搬出動作の両動作を,一対のハンドラにそれぞれ行わせるように駆動制御する。これにより、装置が完全に停止するのを防止できる。 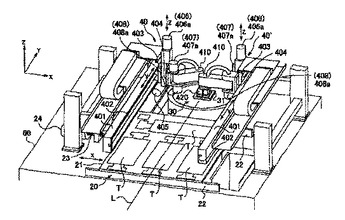 (もっと読む)
(もっと読む)
221 - 226 / 226
[ Back to top ]