
Fターム[3C007BS26]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 複腕型マニピュレータ (334)
Fターム[3C007BS26]の下位に属するFターム
人間型マニピュレータ (108)
Fターム[3C007BS26]に分類される特許
81 - 100 / 226
自動生産装置

【課題】小型かつ低コストで、多品種に容易に対応可能な汎用性の高い自動生産装置を提供する。
【解決手段】架台2上でワークWに対して複数の作業を行う自動生産装置1は、架台上に設置されてワークの搬送及び複数の作業を行う2基の多関節アーム部6A、6Bと、2基の多関節アーム部に交換可能に取付けられ、ワークの搬送及び複数の作業の少なくとも1つに対応する形状に形成された複数の作業ハンド7と、基台15Aと、基台上に設置されて複数の作業のうち少なくとも1つに使用される作業機構16A〜16Fとを有し、架台上かつ2基の多関節アーム部の少なくとも一方の作業範囲内に交換可能に配置された複数の作業ユニット8と、架台上に設けられ、作業ユニットの配置位置を規定する位置決め手段17と、2基の多関節アーム部及び複数の作業ユニットと接続され、ワークの搬送及び複数の作業を制御する制御部23と、を備える。
(もっと読む)
生産装置

【課題】部品の組立を行なう装置を小型化させると共に、作業効率の向上を図ることができる。
【解決手段】生産装置1は、組立部の一部を保持するハンド11を有する一対のマニピュレータ10A、10Bと、二つの部品の組立位置をなす組立ステージ12と、マニピュレータ10A、10Bを動作させる制御装置14とを有し、マニピュレータ10A、10Bはそれぞれのハンド11A、11Bの作業領域が一部重複するよう配置され、この重複した作業領域Rに組立ステージ12が配置された構成とした。
(もっと読む)
生産装置
【課題】生産装置において、装置内で複数のワークに対して、例えば、加工、計測、調整、組立等の種々の作業を行うことができ、装置単体で多種多様な製品の生産が可能となるようにする。
【解決手段】ワークWに対して作業を行う生産装置100であって、箱状の装置本体1と、装置本体1を下側の作業準備室4と、上側の作業室3とに仕切る平板状の床部5と、作業室3を床部5上で外部から隔離するクリーンカバー6と、作業準備室4の内部から床部5の位置まで昇降可能なユニット固定部21と、作業準備室4内に設けられ、ユニット固定部21を昇降させる昇降機構と、作業室3内に設けられ、作業室3内でワークWを含む被移動物を移動させる多関節ロボット10R、10Lを有するマニピュレータ9とを備える。
(もっと読む)
ウェーハ搬送ロボット及びウェーハ搬送装置
【課題】省スペース化と高スループット化を図ったウェーハ搬送ロボットを提供する。
【解決手段】昇降可能な支持台200と、支持台上に一端が軸支され水平方向に旋回可能な第1アーム部201と、その他端部上に一端が軸支され水平方向に旋回可能な第2アーム部202と、第1アーム内に設けられ、第1及び第2アームを旋回させアームの最大移動範囲内の任意の位置に停止させるアーム駆動機構221,222とで構成される水平多関節ロボット220と、第2アーム部の先端上に軸支され、水平方向に旋回可能な互いに対称的に配置された2つの機械式リンクアーム241,242と、その先端にそれぞれ設けられウェーハを保持するエンドエフェクタ208,209とを有する水平多関節機械式ダブルリンクアーム240とを備え、機械式リンクアームを旋回させる旋回機構が前記第2アームの内部に設けられ、エンドエフェクタは、互いに間隔をおいて上下に配置した。
(もっと読む)
ダブルアーム型ロボット
【課題】簡易な構成と省スペースを実現できるダブルアーム型ロボットを提供する。
【解決手段】搬送物2,3が載置されるハンド部23,33、各々が関節部で回動可能に連結された複数のアーム21,22,31,32を有し、ハンド部23,33がアーム22,32の一端に関節部で回動可能に連結される、第1及び第2の多関節アーム11,12と、第1及び第2の多関節アーム11,12の一端が、基端の関節部によって各々回動可能に連結されるアーム支持部13と、アーム支持部13の一端を鉛直方向に移動可能に保持し、基台15に固定される基柱14と、第1及び第2の多関節アーム11,12を基端の関節部で回動させる第1及び第2のアーム駆動部と、第1及び第2の多関節アーム11,12における基端の関節部以外の関節部での回動を行わせる第1及び第2の関節回動部とを備える。
(もっと読む)
ロボットシステム
【課題】視覚センサを用いることなく、エンドエフェクタ側に特別な機構が不要で、演算処理も簡単で、ケーブルなどの柔軟物の組立作業を行える。
【解決手段】手先にエンドエフェクタを有するロボットを用いて、下記ステップ(1)〜(5)で端部にコネクタがついたケーブルの組立作業を行う。(1)コネクタ6を把持し、予め設定された目標力を加えて作業対象物に接続する。(2)コネクタとケーブルの境界部分でケーブルの一部を把持し、エンドエフェクタの爪間でケーブルが滑るように把持幅を調整する。(3)エンドエフェクタに目標力を加えるように動作させつつ、エンドエフェクタの移動を制御する。(4)予め設定された長さとエンドエフェクタ移動量が一致した場合に、作業対象物のケーブル固定位置1141にケーブルを固定する。これを(2)〜(4)まで繰り返す。(5)ケーブルの他端のまで到達した場合に、コネクタを把持し、作業対象物に接続する。
(もっと読む)
ロボットの作業位置修正システムおよびそのシステムを備えた簡易設置型ロボット
【課題】簡易設置型の作業用双腕ロボット用の作業位置が移動した場合に、その双腕ロボットが自力で作業位置を修正できるようにするシステムを得ることにある。
【解決手段】作業位置修正システムには、作業領域に設けたマークと複数の撮像手段とにより作業領域に対するロボットの相対位置を繰返し求める位置同定手段と、位置同定手段が求めた相対位置の変化に基づきロボットの移動を検知する移動検知手段と(ステップS11)、移動検知手段が検知した移動量により作業位置の修正が必要か否かを判断する作業位置修正要否判断手段と(ステップS13)、作業位置の修正が必要と判断された場合に、腕による作業領域内での作業が可能な作業可能位置にロボットを移動させる移動手段と、を設け、さらに移動手段には、腕に設けられて作業領域に分離可能に連結し得るアンカ手段を設け、作業可能位置にロボットを移動させる際にアンカ手段を作業領域に連結して腕の動作によって移動させるようにしたものである。
(もっと読む)
多関節ロボット
【課題】駆動部からの発塵防止のためアーム自身を密閉構造とした多関節ロボットにおいて、密閉用の防塵カバーを固定するボルトの損傷と緩みを防止する。
【解決手段】肩関節部を中心に上腕を回動させる駆動源を備えた支持部材10に、防塵カバー31が取り付けられている。防塵カバー31と支持部材10とは、ガスケット36を介してボルト33で固定されている。防塵カバー31とガスケット36には所定の間隔でボルト33が貫通する穴が設けられ、穴に対向する支持部材10の面にタップ穴が形成されている。また防塵カバー31にはザグリ30が形成されている。防塵カバー31とボルト33の間にはカラー34と高弾性ゴムワッシャ35を介在させる。外力によって防塵カバーとボルトの間に相対的変位が生じても高弾性ゴムワッシャでこれを吸収し、ボルトの損傷と緩みを防止する。
(もっと読む)
パレタイズ装置
【課題】パレタイズ装置において、簡単な構成により、ワークやパレットに寸法ばらつきがあっても、パレタイズ時のワーク間の干渉やパレタイズされたワーク間の隙間の発生を防止して柔軟に、且つ高速にパレタイズ可能とする。
【解決手段】本装置1は、ワークを把持するハンド部2と、ハンド部2を移動させるアーム部3と、積載したワークの位置情報を取得する計測部5と、前記情報を記憶する記憶部6と、各部の動作を制御する制御部10と、を備えている。制御部10は、ワークを把持したハンド部2を移動させてパレットにワークを積載した際に、計測部5によってそのワークの積載位置を取得して記憶部6に記憶させ、次のワークをパレットに積載する際に、記憶部6に記憶されている積載位置に基づいて、ワークの積載予定位置を決定する。既積載ワークの積載位置を基準にするので、ワークやパレットの寸法変動に対応でき干渉や隙間の発生を防止できる。
(もっと読む)
産業用ロボット
【課題】大型化する搬送対象物を搬送する場合であっても、小型化が可能で、かつ、コストを低減することが可能な産業用ロボットを提供すること。
【解決手段】産業用ロボットは、搬送対象物が搭載されるハンドと、ハンドが連結されるアームと、アームを支持する支持部材と、支持部材を上下動させる上下駆動機構と、上下駆動機構を制御する制御部80とを備えている。上下駆動機構は、2台の駆動用モータ20を備え、制御部80は、2台の駆動用モータ20を制御するモータ制御部81を備えている。モータ制御部81は、一方の駆動用モータ20と、他方の駆動用モータ20とを個別に制御している。
(もっと読む)
産業用ロボット
【課題】大型化する搬送対象物を搬送する場合であっても、小型化が可能で、かつ、コストを低減することが可能な産業用ロボットを提供すること。
【解決手段】搬送対象物が搭載されるハンドと、ハンドが連結されるアームと、アームを支持する支持部材とを備えるとともに、支持部材を上下動させる上下駆動機構、および支持部材を水平方向に移動させるための水平駆動機構、および上下方向を軸方向とする所定の中心軸を中心に前記支持部材を回転させるための回転駆動機構を備え、前記上下駆動機構、前記水平駆動機構、前記回転駆動機構は、それぞれ複数の駆動用モータを備える。例えば上下駆動機構においては、上下駆動用モータ20、プーリ28,29とベルト30、上下ブレーキ機構24、減速機21、減速機の出力軸に設けられたピニオン22をそれぞれ2組有し、1本のラックに2個のピニオン22が噛み合い駆動する。
(もっと読む)
ダイレクトドライブモータ及びスカラーロボット
【課題】磁極の固定に起因する雰囲気汚染を回避しながらも、ロボットに必要な剛性を確保でき且つ信頼性の高い,大気外の雰囲気中で用いられるダイレクトドライブモータ及びスカラーロボットを提供する。
【解決手段】直列的に連結された3段のブラシレスモータBM1において、ステータ29と、大気軸受装置33と、大気側回転子30と、角度検出器35,36と、モータ回転子21と、真空軸受装置19のうち少なくとも2つを、モータ軸線方向において互いに少なくとも一部が重合する位置に配置しているので、コンパクトな構成ながら、高い剛性を確保することができる。
(もっと読む)
多関節ロボット
【課題】コラムに備えられた移動機構の支持部に作用するモーメント荷重を小さくしながら、多関節ロボットが占有するスペースを小さくする多関節ロボットを提供する。
【解決手段】ハンド部8と、前記ハンド部8と連結され少なくとも2つ以上の回転関節3、4、5を備え前記ハンド部8が1方向に移動するように旋回しかつ上下方向に並進移動する水平多関節の上アーム21と、上アーム21に対向配置され上アーム21と同様な構造を有する下アーム22と、各アームを上下に移動させる二つの移動機構11と、移動機構と各アームを連結する二つの支持部材10とを有する。上アーム21の関節部4は、ワーク9の取り出し位置から縮み位置に移動するときコラム12に近づくように旋回する。また、下アーム22の関節部4は、ワーク9の取り出し位置から縮み位置に移動するときコラム12から遠ざかるように旋回する。
(もっと読む)
ロボット及びその協調作業制御方法
【課題】 一つのエンドエフェクタに対する他のエンドエフェクタの相対ヤコビアンを用いるインピーダンス制御を通して作業空間の制約なしに協調作業を遂行することができるロボット及びその協調作業制御方法を提供する。
【解決手段】 作業を遂行する複数のマニピュレータにそれぞれ設けられたエンドエフェクタの絶対座標位置を計算し、前記各エンドエフェクタの絶対座標位置から相対座標位置を計算し、前記相対座標位置を用いて前記複数のマニピュレータの関節トルクを計算し、前記関節トルクによって前記複数のマニピュレータの協調作業を制御する。
(もっと読む)
力バランス移動ロボットシステム
力バランスロボットシステムおよび関連する方法が開示される。ロボットシステムは、本体と、バランス部材と、バランスシステムとを含み得る。ロボットシステムは、静的に不安定であり得、これは静的に不安定な本体を有する結果であり得る。バランス部材は、本体にジョイントで接続され得る。バランスシステムは、ロボットシステムのバランスを動的に取るために用いられる1つ以上のサブシステムを有し得る。そのようなサブシステムは、再位置決めシステムと、加速システムと、駆動システムとを含み得る。再位置決めシステムは、バランス部材を再位置決めして、質量中心を目標の上方に位置決めすることができる。加速システムは、バランス部材を加速させて、目標トルクを生じることができる。駆動システムは、前記ロボットシステムの車輪を駆動して、バランスを維持することができる。バランスを保持しながら、ロボットシステムは、外力を吸収し、外部対象物に力を加え得る。 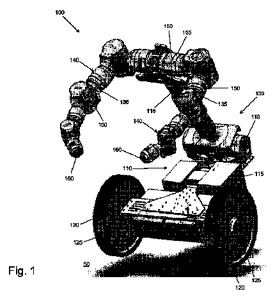 (もっと読む)
(もっと読む)
多関節ロボット
【課題】本発明はメンテナンスが容易な多関節ロボットを提供する。
【解決手段】搬送物を載置するハンド部8と、前記ハンド部8と連結され、少なくとも2つ以上の回転関節3、4、5を備え、前記ハンド部8を1方向に移動するように伸縮し、上下方向に対向するように配置された多関節アーム21、22と、上下に移動するようにコラム12に取り付けられた上下方向に移動する移動機構11と前記多関節アーム21、22とを連結する支持部材10と、前記コラム12の下端部に連結され、前記コラム12に取り付けられた前記多関節アーム21、22を旋回する台座13とからなる多関節ロボットにおいて、前記台座13を旋回させる減速機37の出力軸39の固定面が前記台座13を支持する前記軸受42の厚みの略中心に位置するものである。
(もっと読む)
物体入れ換え装置および物体移動装置
【課題】同一平面内において物体の位置入れ換えを効率的に行って、複数の物体の任意位置への移動を可能とする。
【解決手段】移動機構ビーム5a,5bの交点に配されたスライダ19aに、回転軸7aを介して物体搭載部11aを持つ入れ換え機構13aを連結する。移動機構ビーム6a,6bの交点に配されたスライダ19bに、回転軸7bを介して物体搭載部11bを持つ入れ換え機構13bを連結する。スライダ19a,19bの移動により、物体12a,12bが移動する。入れ換え機構13a,13bは、凸型接続部9aと凹型接続部9bの嵌合により連結可能とされている。この連結状態で、物体搭載部支持機構10が、物体搭載部11a,11bを支持した状態で回転し、物体搭載部11a,11b、従って物体12a,12bの位置入れ換えを行う。入れ換え機構13a,13bの干渉による影響を受けずに、物体12a,12bを任意位置に移動できる。
(もっと読む)
腕運動支援装置
【課題】 従来までの上半身の動きを補助するための装置においては、前記補助装置を利用する際、利用者は自身の腕を前記補助装置に固定する必要があり、前記装置の利用者は、前記装置の装着時に違和感を感じることを余儀なくされていた。
【解決手段】 本発明は、利用者の上腕部分および前腕部分を支える、アルファベッドの「U」のような形などをした支持体を有し、前記前腕部分の支持体に、かまぼこ型状でありその表面が滑りやすい材質からなるセンサーを備えた腕運動支援装置である。
(もっと読む)
ナットランナ支持具
【課題】ナットランナの追従性能を容易に管理できるナットランナ支持具を提供すること。
【解決手段】ナットランナ支持具70は、ロボットアーム33に取り付けられてナットランナ71を支持する。このナットランナ支持具70は、ロボットアーム33に取り付けられた基部72と、この基部72に回動可能に支持されてナットランナ71を支持するフレーム73と、を備える。基部72には、ボルト723が螺合され、フレーム73には、ボルト723が収容される収容部734が形成され、収容部734の内面とボルト723の外面との間には、緩衝材735が介装されている。
(もっと読む)
ドア取り外しシステム
【課題】ドアをボディから取り外して搬送する際に、ドアやボディが損傷するのを防止できるドア取り外しシステムを提供すること。
【解決手段】ドア取り外しシステム1は、自動車のボディ10にボルト12で固定されたドア11を、このボディ10から取り外す。このドア取り外しシステム1は、ドア11を把持しかつ略鉛直方向を旋回軸213として旋回可能な双腕ロボット20と、この旋回軸213に作用するトルクを検出するトルクセンサ214と、双腕ロボット20を制御する制御装置と、を備える。制御装置は、双腕ロボット20によりドア11を把持した状態で、この双腕ロボット20を旋回軸213で旋回させる際、トルクセンサ214により旋回軸213に作用するトルクを検出し、この検出したトルクが所定値以上である場合には、双腕ロボット20の旋回を停止する。
(もっと読む)
81 - 100 / 226
[ Back to top ]