
Fターム[3C007BS26]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 複腕型マニピュレータ (334)
Fターム[3C007BS26]の下位に属するFターム
人間型マニピュレータ (108)
Fターム[3C007BS26]に分類される特許
141 - 160 / 226
ダブルアーム型多軸搬送ロボット
【課題】 アームに取り付けられたハンドを直線的に動作させることが容易で、大型の搬送物を精度良く運ぶことが可能なダブルアーム型ロボットを提供すること。
【解決手段】 上下軸(Z軸)を有するとともに、搬送物を載せる2個のハンドを有するダブルアーム型多軸搬送ロボットにおいて、この2個のハンドを駆動するアームは、それぞれ上下に配設した2個の直交ロボットであることを特徴とするダブルアーム型多軸搬送ロボットとした。
(もっと読む)
ロボット装置及び形状認識方法

【課題】腕部を有するロボットにおいて、周囲環境に依存しない方法で把持対象物の三次元形状の認識を行うロボット装置を提供すること。
【解決手段】本発明の一態様に係るロボット装置10は、頭部11と、頭部11に連結された腕部13と、腕部13に設けられ、ワークWの上面を撮像する手先カメラ15と、頭部11に設けられた頭部カメラ12と、手先カメラ15によって撮像したワークWの画像に基づいて、手先カメラ15の移動経路を計画する算出部とを有し、移動経路に沿って移動する手先カメラ15によって撮像された画像と、頭部カメラ12によって撮像された画像とに基づいてワークWの三次元形状を認識するものである。
(もっと読む)
ギヤ装置組立て方法
【課題】組立てコストを低減できるギヤ装置組立て方法を提供すること。
【解決手段】変速機の組立て方法は、リバースギヤを有する変速機本体と、アイドルギヤを有する変速機ケースと、を備える変速機を双腕ロボットで組み立てる。すなわち、基部61と、双腕ロボットのハンドに接続可能な接続部63と、双腕ロボット30から接続部63を介して供給される動力によりピン621を揺動させる揺動機構62と、を備える位相合わせ冶具60を用いて、双腕ロボットで位相合わせ冶具60を変速機ケース上に載置して、位相合わせ冶具60のピン621を変速機ケースのアイドルギヤに係合させ、双腕ロボットで変速機ケースを把持するとともに、双腕ロボットのハンドを位相合わせ冶具60の接続部63に接続し、双腕ロボットから動力を供給して位相合わせ冶具60を駆動してアイドルギヤを揺動させながら、変速機ケースを変速機本体に取り付ける。
(もっと読む)
ワーク取付けシステムおよびワーク取付け方法
【課題】ワークを確実に把持でき、かつ、この把持したワークを高精度で取り付けることができるワーク取付けシステムを提供すること。
【解決手段】ケース取付けシステム1は、第2カメラ73と、双腕ロボット30と、制御システム33と、を備える。制御システム33は、変速機本体11が供給されると、第2カメラ73で変速機本体11を撮影して変速機本体11の位置を特定し、変速機ケース12が供給されると、変速機ケース12の挿入孔を双腕ロボット30で把持し、この把持した変速機ケース12を変速機本体11と第2カメラ73との間に位置させて、その後、第2カメラ73で変速機ケース12を撮影し、この撮影画像に基づいて変速機ケース12のうち軸受を認識し、この軸受を基準として、変速機ケース12を変速機本体11に取り付ける。
(もっと読む)
ギヤ装置組立て方法
【課題】組立てコストを低減できるギヤ装置組立て方法を提供すること。
【解決手段】変速機の組立て方法は、変速機本体11と変速機ケース12とを備える変速機10を、力覚センサ49を有する双腕ロボット30で組み立てる。すなわち、変速機ケース12を双腕ロボット30で把持し、この把持した変速機ケース12を変速機本体11上に配置し、その後、双腕ロボット30の力覚センサ49でハンド42A、42Bに作用する力を監視しながら、変速機ケース12を変速機本体11に接近させ、力覚センサ49の検出値が所定値を超えることなく、変速機ケース12が所定高さh1まで接近した場合には、変速機ケース12をさらに接近させて、変速機本体11に取り付け、変速機ケース12が所定高さh1まで接近する前に、力覚センサ49の検出値が所定値を超えた場合には、変速機ケース12を変速機本体11から離して、再試行する。
(もっと読む)
コネクタ自動挿抜装置及びコネクタ挿抜方法
【課題】 多数のRFコネクタを有した供試体において、供試体のRFコネクタから終端器を抜き差しする作業処理を自動化し、RF信号の電気特性試験における手作業の所要時間を短縮する自動装置を得る。
【解決手段】 終端器及びRFコネクタの端末位置を計測する画像処理装置と、終端器を把持する把持部と把持部を3次元方向に移動させる駆動部を有したロボットハンドと、計測用ケーブルを3次元方向に移動可能な計測用ハンドと、ロボットハンドにおける把持部の把持または解放動作、上記ロボットハンド及び計測用ハンドの移動動作を制御する制御装置とを備える。
(もっと読む)
物品の直線搬送装置、及び当該装置におけるベルト体の張力調整方法
【課題】
第1及び第2の各平行リンク機構の連結部に設けられたベルト伝動機構を構成する一対のベルト体の張力調整を容易にすることである。
【解決手段】
第1及び第2の各平行リンク機構LD1 ,LD2 が中間リンク台Eで連結されて、当該中間リンク台Eを構成する上下一対の中間リンク板5が左右一対の中間連結軸S3a, S3bで連結されて、当該中間連結軸S3a, S3bに支持された左右一対の各プーリ体P1,P2 に互いに逆方向の第1及び第2の各ベルト体V1,V2 が部分巻回されて、中間リンク台Eにおいて第1平行リンク機構LD1 の正逆両方向の回動力を第2平行リンク機構LD2 に伝達させる構成の物品の直線搬送装置において、前記一対のプーリ体P1,P2 の一方を軸方向に二分割して、各分割プーリ体P1a, P1bに対して前記一対のベルト体V1,V2 の一端部をそれぞれ固定した構成とする。
(もっと読む)
多関節ロボット
【課題】本発明は上下移動軸からの発塵による基板の汚染を防止するとともに、生産性を向上させた液晶用のガラス基板や半導体ウェハ等の薄板状のワークをストッカに出し入れする多関節ロボットを提供する。
【解決手段】搬送物を載置するハンド部(8)と、前記ハンド部(8)と連結され、少なくとも2つ以上の回転関節(3)、(4)、(5)を備え、前記ハンド部(8)を1方向に移動するように伸縮し、軸方向に対向するように配置された多関節アーム(1)と、前記多関節アーム(1)と上下に移動する移動機構(11)とを連結する支持部材(10)と、前記移動機構(11)に備えられた旋回機能を有する台座(13)とからなる多関節ロボット(1)において、前記移動機構(11)は、前記ハンド部(8)の移動方向と同方向にコラム(12)が配置され、前記移動機構(11)に配置された支持部材(10)は、前記ハンド部(8)の移動方向に直交する方向に突出し、前記多関節アーム(2)と連結されたものである。
(もっと読む)
アーム駆動装置及び産業用ロボット
【課題】アームの動作速度と動作精度を高めることができるアーム駆動装置を提供する。
【解決手段】関節部により連結された複数のアームを伸縮動作させることができるアーム駆動装置1において、基台9上の第1関節部2に回転可能に連結された第1アーム5と、第1アーム5の先端側に位置する第2関節部3に回転可能に連結された第2アーム6と、第2アーム6の先端側に位置する第3関節部4に連結された第3アーム10と、第1アーム5の第1関節部2側に設けられた第1タイミングプーリ11と、第1アーム5の第2関節部3側に設けられた第2タイミングプーリ12と、第1タイミングプーリ11と第2タイミングプーリ12との間に掛け渡され、第1アーム5が回転したときの第2アーム6の回転量を規制する第1タイミングベルト15と、第1関節部2及び第2関節部3の一方又は両方に、第1アーム5及び第2アーム6それぞれに回転力を伝達する合計2以上の駆動源7,25とを備えるように構成する。
(もっと読む)
基板搬送装置
【課題】 高真空状態下において、半導体基板等を複数の処理チャンバーにおいて効率よく搬送でき、プロセスチャンバーのフットプリントを大幅に縮小可能な基板搬送装置を提供する。
【解決手段】 真空環境2内に、回転駆動軸R4回りに旋回可能な第1アーム130と、第1アーム130に対して所定角度で回動する第2アームと、第2アームの先端で基板を把持可能なツインハンドとが配置された基板搬送装置であって、第1アーム、第2アーム、及びツインハンドを駆動する複数の駆動モータ21,22,23,24の駆動力を同軸配置された複数の各回転駆動軸R1,R2,R3,R4にそれぞれ伝達する伝達ベルト40,41,42,43により、第1アーム130、第2アーム、及びツインハンドは、第1アーム130が旋回中心点として旋回し、第2アームとによるアーム伸縮により所定位置に移動し、ツインハンドがチャンバー間での基板の受け渡しを行うようにした。
(もっと読む)
基板処理システム、基板搬送装置、基板搬送方法、および記録媒体
【課題】搬送中における基板に対して適切な処置を施すことができる基板搬送装置を提供する。
【解決手段】基板搬送装置50は、第1基板収容部20と第2基板収容部30との間を移動可能なフォーク支持体51と、フォーク支持体に移動可能に支持されたフォーク60,65と、を備える。フォークは、第1基板収容部から第2基板収容部へ搬送される基板を第1支持位置において支持し、第2基板収容部から第1基板収容部へ搬送される基板を第1支持位置とは異なる第2支持位置において支持する。第1支持位置に基板を支持したフォークは、フォーク支持体の移動中に第1待機位置に配置され、第2支持位置に基板を支持したフォークは、フォーク支持体の移動中に第1待機位置とは異なる第2待機位置に配置される。
(もっと読む)
ロボットシステム
【課題】手動誘導運転の際、ハンドを容易に移動させて微調整することができ、またハンドが誤って周囲の物と衝突するのを防止することができるロボットシステムを提供する。
【解決手段】ロボットシステム10は、ロボット本体11とこのロボット本体11を制御する制御部20とを備えている。このうちロボット本体11は、第1のハンド12と、第1のハンド12を第1のハンド12の基端12aから先端12bに向う一定方向に沿って移動させるJ1軸と、J1軸を水平面上で回転させるJ4軸と、J4軸を垂直方向へ移動させるJ3軸と、J3軸を水平面上で一定方向に移動させるJ5軸とを有している。J1軸とJ3軸とJ4軸とJ5軸とを制御部20により同期して駆動し、第1のハンド12を第1のハンド12の中心を基準とするツール座標系のX軸、Y軸、およびC軸上で移動できるようになっている。
(もっと読む)
2つの基板ホルダを備えた基板移送装置
【課題】基板を移送する際の時間を短縮でき、かつ形状がコンパクトな基板移送装置を提供すること。
【解決手段】基板移送装置12は、可動アームアセンブリ18と、2つの基板ホルダ22、23と、同軸駆動軸アセンブリとを有する。可動アームアセンブリ18は、ほぼX字形の軸アセンブリを有する。基板ホルダ22、23は、X字形部材の異なる対のアーム部30、31、32、33に接続される。同軸駆動軸アセンブリは、伸張位置と収縮位置と間の反転一斉運動で、X基板ホルダ22、23のアームを動かす。
(もっと読む)
基板搬送ロボット
【課題】クリーンロボットとしての適性を確保しつつフットプーリントの縮小を図ることが可能な基板搬送ロボットを提供すること。
【解決手段】先端アーム3の先端部37が水平面上を直線移動(Y軸移動)し得る連動式アームユニット300と、第2電動モータ36を駆動源とする駆動力を受け回転中心51aを回転中心に水平面上を回転し得る単独回転式アーム51と、第3電動モータ、第4電動モータ56、57を駆動源とし基部69、73を回転中心に水平面上を回転し得る単独回転式ハンド68、72とを備える。先端アーム3の先端部37の水平直線(Y軸)上の位置、単独回転式アーム51の水平回転位置、及び単独回転式ハンド68、72の水平回転位置をそれぞれ制御し、単独回転式ハンド68、72を、先端アーム3の先端部37の直線移動方向(Y軸移動方向)に対して直交する水平方向(X軸方向)へ前進及び後退させる。
(もっと読む)
ロボット・リスト・アセンブリの為の方法および装置
本発明は、リスト・アセンブリ100の為の方法、装置、システムを提供する。リスト・アセンブリ100は、キャップ104と底部112を有するハウジングと、上記ハウジングに少なくとも一部が内包され、ロボット・アームに結合されるように適合された少なくとも1つのピボットと、上記ピボットに結合され、ベアリングの周りに上記ピボットを回転させるように適合されたベルトとを含む。上記ハウジングの底部は、少なくとも1つのピボットとベアリングから離して熱を反射するように適合されている。  (もっと読む)
(もっと読む)
直線移動機構およびこれを用いた搬送ロボット
【課題】 正確な直線移動行程を実現しつつ、構造の簡略化を図ることができる直線移動機構、およびこれを用いた搬送ロボット、さらには真空環境下での使用に適した当該搬送ロボットを提供する。
【解決手段】 本発明に係る直線移動機構B1は、ガイド部材1と、このガイド部材1上に設定された水平直線状の移動行程GLに沿って移動可能な2つの移動部材と、駆動プーリ31b、およびこの駆動プーリ31bに掛け回されて移動行程GLの平行線に沿う所定の往復動区間3Aa,3Bbを往復動する出力ベルト33を含んで構成された駆動機構3A,3Bと、駆動プーリ31bを駆動するためのモータM3,M4とを備え、移動部材は、連結部材24a,24bによって駆動機構3A,3Bの出力ベルト33にそれぞれ連結されており、駆動機構3A,3BおよびモータM3,M4は、それぞれガイド部材1に支持されている。
(もっと読む)
搬送機構およびそれを備えた処理装置
【課題】ウェハ等の基板を搬送する搬送機構において、構成を簡単にしながらも一度に搬送できる基板の枚数を増加させ、更に可動部のケーブルレスを実現する。
【解決手段】案内ガイド18によって移動可能な移動ベース21と、移動ベースに回転可能に載置されたロボットベース20と、ロボットベース20上に固定された第1アーム27と、第1アーム27の両端に支持された2つの第2アーム28と、その各々の先端に支持されたピンセット30とを備えるとともに、移動ベース21を挟むように敷設された第1及び第2のリニアモータの可動子12、14を連結部材16、17を介してロボットベース20に連結させた。
(もっと読む)
建設現場や、鉱山で使用する、片腕で扱える重量が1トン以上の5本指強力ロボットアーム。
【課題】重量を物取り扱う作業現場での、5本指を持つ人間の腕型ロボットを提供する。
【解決手段】以上の課題を解決するために、マスタースレーブ方式で制御する5本指強力ロボットアームを発明した。本発明を作業内容に適した任意の台座、又は台車に装着して活用する。この形態なら二足歩行時の重心が高くならないように、5本指強力ロボットアームを軽量化する必要性は高くない。5本指強力ロボットアームはアクティブサスペンション(脚)の技術をアーム部に使用したアクティブアクチュエーター(腕)を主たる動力源とする。アクティブサスペンションは、重さが50トン以上ある最新式の戦車の姿勢制御でも使用され始めており、十分な高出力と、耐久性がある。
(もっと読む)
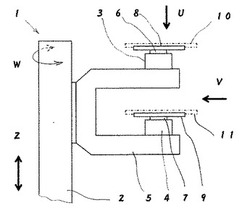
防塵機構を備えた基板搬送装置
【課題】防塵効果が高く、アーム部が複数になっても対応できる防塵機構を提供すること
【解決手段】基板を搭載するアーム部を支持するとともに、支柱9外面に設けられた直線状の開口部12を介して支柱9内に設けられた案内機構22へと接続されて、案内機構22に従って、開口部12の開口を移動する支持部材4と、開口部12を封じて、支柱9内部と外部とを隔離するシールベルト5と、を備え、案内機構22によって支持部材が移動しても、シールベルト5によって支柱の内部が外部に露出しないよう構成された基板搬送装置において、シールベルト5が、その両端を支柱内部に固定されるとともに、支持部材4に回転可能に支持されたローラに巻装されて、開口部12を封じるようにした。
(もっと読む)
複数のスライダを持つ産業用ロボット
【課題】 各スライダ20、30間の許容最短距離Lminを、操作者が容易、かつ任意に変更・設定でき、被搬送物22、33同士の衝突を容易、かつより確実に防止することができると共に、ティーチング作業等をも安全に行うことを可能にする。
【解決手段】 第一及び第二スライダ20、30をそれぞれ独立して移動させるサーボモータ27、37に組み込まれたエンコーダ28、38の位置検出用信号をスライダ移動制御部13に取り込んで両スライダ20、30の位置を検出して両スライダ20、30の移動を制御すると共に、これらの検出位置から両スライダ20,30間の距離Lを求める。他方、両スライダ20、30間の許容最短距離Lminを任意に設定可能な最短距離設定部14を設け、上記距離Lを許容最短距離Lminと比較し、距離Lが許容最短距離Lminに達したとき、両スライダ20、30の互いに接近する方向への相対的な移動を停止させる。
(もっと読む)
141 - 160 / 226
[ Back to top ]