
Fターム[3C007BS26]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 複腕型マニピュレータ (334)
Fターム[3C007BS26]の下位に属するFターム
人間型マニピュレータ (108)
Fターム[3C007BS26]に分類される特許
41 - 60 / 226
アーム機構およびそれを備えた真空ロボット
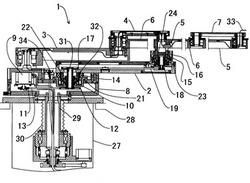
【課題】高剛性で耐熱性もある真空環境内に適した真空ロボットのアーム構成を提供すること。
【解決手段】内部に気密な空間を有するアームベース8と、アームベース8内に設置されたアーム駆動用モータ9と、アーム駆動用モータ9によって回転する中空の減速機シャフト31と、減速機シャフト31の回転が入力されて所定の比だけ減速し、減速機シャフト31の周囲で回転する第1減速機出力軸32と、からなり、アームベース8内に減速機シャフト31の下端が露出するよう設置された第1減速機10と、中空の減速機シャフト31の上端が侵入することでアームベース8の気密な空間と同圧となる気密な空間を有し、かつ第1減速機出力軸32に固定される第1アーム2と、第1アーム2の先端に設置され、入力軸が減速機シャフト31と接続された第2減速機15と、第2減速機15の出力軸に固定され、内部に気密な空間を有しない第2アームと、第1アーム2と第2アーム5とに追従するリンク機構と、を備えた。
(もっと読む)
ロボット及びロボットシステム

【課題】可動範囲をより大きくしながらも、省スペース性能をより向上することができるようにした、ロボット及びロボットシステムを提供する。
【解決手段】基台10と、複数の関節により連結された複数の構造材からなるアームと、を有するロボット1であって、アームは、ある関節の回転軸と次の関節の回転軸との位置が所定方向にオフセットされるとともに、次の関節の回転軸と次々の関節の回転軸との位置が所定方向とは反対方向にオフセットされたオフセット部を有して構成する。
(もっと読む)
ロボットの動作診断方法、ロボットの制御装置、ミニエンバイロメントシステムの制御装置、ロボット、及びミニエンバイロメントシステム
【課題】ロボット動作を診断して不具合を回避することができ、かつ、異常部位の詳細表示やパネル上でのロボット動作の再現により、メンテナンス時間を短縮できるロボットの動作診断方法を提供する。
【解決手段】複数の駆動軸をそれぞれ駆動する複数のモーター、マニピュレータ、及びセンサを有し、駆動軸によりマニピュレータを移動させるロボットの動作診断方法において、少なくとも1つの駆動軸に対し、ロボットの診断対象とする動作パターンを設定し、ロボットの初期状態での動作パターンにおいて、複数回計測したモーターを制御する制御装置の複数の入出力信号と、センサまたはマニピュレータを制御する機器の複数の入出力信号とを判定データとし、新たに計測した判定データを診断データとし、統計的パターン認識方法により診断データが判定データに含まれるかを判別することにより、新たに計測した時のロボットの動作が正常であるか判定する。
(もっと読む)
搬送システム,ロボット装置及び搬送方法
【課題】小型のロボットを用いながらも相対的に大重量のワークの搬送を自動化できるようにした、搬送システム,ロボット装置及び搬送方法を提供する。
【解決手段】ワークWを懸垂して支持するクレーンユニット102を水平方向に移動可能とするクレーン移動機構103と、ワークWを支持したクレーンユニットを保持して移動させるマニピュレータユニット101と、を有し、第1位置にあるワークWをクレーンユニットにより支持させ、ワークWを支持したクレーンユニット102を第2位置側に移動させて、支持したワークWを第2位置に載置する。
(もっと読む)
吊下げ型協調作業ロボット
【課題】人と共存、協調する作業場所に作業ロボットを投入する場合に、作業場所の近傍の床上の障害物があっても作業ロボットを配置することができ、その作業ロボットを配置した際に作業者の安全を確保することができ、しかも高精度の位置決めも作業命令の大規模な改変も必要としない作業ロボットを提供することにある。
【解決手段】撮像手段と、可動部を逆入力可能に駆動する関節を持つ少なくとも1本の作業腕と、前記作業腕を支持する胴部と、作業場所の天井又は壁に基部を着脱可能に固定されて吊り下げられるとともに先端部で前記胴部と前記撮像手段とを支持する支持部材と、前記撮像手段が撮像した画像に基づき前記作業場所での作業対象物と当該作業ロボットとの相対位置を認識し、その相対位置に基づき前記作業対象物に対する作業を前記作業腕に行わせる作動制御手段と、前記作業が人と共存、協調して行う作業であることを認識すると、前記作業腕の関節を作動させるモータの出力を低下させる出力制御手段と、を具えてなる吊下げ型作業ロボットである。
(もっと読む)
産業用ロボット
【課題】2本のアームを個別に伸縮させることが可能であっても、2本のアームの伸縮動作や本体部に対する回動動作を安定させることが可能な産業用ロボットを提供すること。
【解決手段】第1アーム5は、第1アーム部11と、第1アーム部11に保持される第2アーム部12とを備え、第2アーム6は、第3アーム部13と、第3アーム部13に保持される第4アーム部14とを備えている。ロボット1では、第1アーム5と第2アーム6とを個別に伸縮させることが可能となっている。また、ロボット1では、第1アーム部11の回動中心と第3アーム部13の回動中心とは同軸上に配置されるとともに、第1アーム5と第2アーム6とは、第1アーム5および第2アーム6が縮んでいる状態で仮想線Lに対して略線対称になるように構成され、第1アーム部11と第3アーム部13と第2アーム部12と第4アーム部14とは、上下方向においてこの順番で配置されている。
(もっと読む)
タイヤ又はタイヤ構成部材の製造装置及び製造方法
【課題】タイヤ又はタイヤ構成部材の製造において、ロボットアームによる物体の移動範囲を広くして、ロボットによる作業領域を拡大する。
【解決手段】ロボット1の一対のロボットアーム20を駆動してロボットハンド15を移動させ、ロボットハンド15により物体を保持して移動させる。ロボット本体10を、昇降装置30により上下方向に移動させ、かつ、移動装置40により水平面内の直交する2方向に移動させて、ロボット本体10に設けられたロボットアーム20を、互いに直交する3方向の各方向に移動させる。基部11を中心に胴体部12を旋回させて、ロボットアーム20を旋回させる。制御装置50により3方向への移動や旋回を制御して、ロボットアーム20を各方向に変位させ、ロボットハンド15をロボットアーム20の稼動範囲と変位範囲の任意の位置に移動させる。
(もっと読む)
多関節ロボット及び生産設備の製造方法
【課題】ロボットを分解することなく移送でき、容易に設置できる及び生産設備の製造方法を提供する。
【解決手段】台座と、台座に立設され少なくとも上側ブロックと下側ブロックとを有するコラムと、コラムに設けられコラムに沿って移動する移動機構と、移動機構に連結された支持部材と、支持部材に支持され複数の関節を有するアームと、を有する多関節ロボットであって、上側ブロックが横倒し状態にまで揺動可能となるように上側ブロックと下側ブロックとを連結する可動部材と、上側ブロックが横倒し状態となった状態で上側ブロックを固定する固定部材と、を有して構成する。
(もっと読む)
真空吸着パッド、搬送アーム及び基板搬送装置
【課題】搬送アームに基板を真空吸着して搬送する場合において、容易に交換することができるとともに、長時間吸着してもウェハに固着することがなく、安定してウェハを真空吸着することができる真空吸着パッドを提供する。
【解決手段】基板を真空吸着して搬送する基板搬送装置16の搬送アーム17(19)に形成された取付孔22又は貫通孔に取り付けられて、搬送アーム17(19)に設けられた真空吸引路21と連結されて基板を真空吸着する真空吸着パッド20であって、第1の開口部44が形成された上面部41と、取り付けられたときに取付孔22または貫通孔と対向し、シール部材32を装着する装着部46が形成された側周面部42とを有する。
(もっと読む)
ロボット遠隔操縦システムとこれに用いる作業ロボット
【課題】遠隔操縦による作業に必要な画像を自律して取得しつつ、一台の作業ロボットのみで作業を行うことができるようにする。
【解決手段】本発明は、作業対象物の測距データを取得するための測距部、作業対象物に対する作業を行う作業用アーム、作業対象物の画像を取得するための撮像部を配設した画像取得用アーム及びそれら各アームを駆動するためのアーム駆動部を設けた作業ロボットBと、作業ロボットBと通信回線を介して接続されるとともに、作業対象物の画像を表示するための表示部、作業ロボットBを遠隔操縦するための操縦情報を生成して当該作業ロボットBに向けて送信する遠隔操縦装置Cとを有するものであり、測距部によって取得した測距データに基づき、作業対象物を撮像部によって撮像できるようにアーム画像取得用アームをアーム駆動部によって自律的に移動させるアーム自律移動手段30aを作業ロボットBに設けている。
(もっと読む)
基板搬送ロボット
【課題】
複数のアームが連結されたアームユニットを備えた基板搬送ロボットにおいて、当該アームユニットの交換・組立、及び調整の作業性を高めることである。
【解決手段】
ベースKに昇降可能に支持された昇降フレームFと、当該昇降フレームF内に配置された駆動モータM1 により旋回される基端アーム(第1アーム)A1 を含む複数のアームA1 ,A2 と、先端アーム(第2アーム)A2 内に配置された駆動モータM2 により旋回されるハンドH1 ,H2 とを備え、複数のアームA1 ,A2 のうち前記基端アーム(第1アーム)A1 を除く残りのアーム(第2アーム)A2 は、当該アームA2 が旋回軸S2 を介して支持されている手前側のアームA1 内に配置された駆動モータM2 により旋回され、前記複数のアームA1 ,A2 が連結されたアームユニットUは、前記昇降フレームFに対して着脱可能な構成の基板搬送ロボットであって、前記アームユニットUは、前記基端アーム(第1アーム)A1 の駆動モータと一体となって、前記昇降フレームFに対して着脱可能な構成とする。
(もっと読む)
ダブルハンドロボットの減速機構
【課題】
ダブルハンドロボットにおいて、下側に配された歯付ベルト伝動機構の組み立てと歯付ベルトの張力の調整を容易に行えるようにすることである。
【解決手段】
第2アームA2 の床板部2における下側の減速プーリユニットU2 が配置される部分は部分的に開口されて、当該下面部分開口3は下蓋体21により閉塞される構成にして、下側に配置される減速プーリユニットU2 の第2アームA2 の長手方向Qに沿った固定位置を当該第2アームA2 の下側から前記下面部分開口3を通して調整可能にすることにより、下側の減速プーリユニットU2 の軸心C41,C42とハンド旋回軸36,37の軸心C3 との軸心間距離L1,L2 を調整して、下側の歯付ベルトV22の張力を調整可能な構成とする。
(もっと読む)
異なる保持エンドエフェクタを有する基板搬送装置
【課題】基板処理装置の基板移動方法に関し、大気搬送部分での、第1エンドエフェクタと第2のエンドエフェクタでの搬送機構を提供する。
【解決手段】半導体基板を第1位置から第2位置に移す装置。該第1及び第2位置は個別的な支持領域において複数の該半導体を保持するようになされている。その装置は、個別的に支える半導体の異なった最大数の支持領域をおのおのが有する2つの基板保持エンドエフェクタ46,48を有する搬送機構を含む。該半導体は該第1位置から該第2位置へと該第1エンドエフェクタ46によって搬送され、該第2位置又は該第1位置における空の個別的支持領域が該第1エンドエフェクタ46上の支持領域の該最大数よりも小さいときは、該第1位置から該第2位置へと該第2エンドエフェクタ48を用いて基板を搬送する。
(もっと読む)
多関節ロボット
【課題】本発明は上下移動軸からの発塵による基板の汚染を防止するとともに、生産性を向上させた液晶用のガラス基板や半導体ウェハ等の薄板状のワークをストッカに出し入れする多関節ロボットを提供する。
【解決手段】搬送物を載置するハンド部(8)と、前記ハンド部(8)と連結され、少なくとも2つ以上の回転関節(3)、(4)、(5)を備え、前記ハンド部(8)を1方向に移動するように伸縮し、軸方向に対向するように配置された多関節アーム(1)と、前記多関節アーム(1)と上下に移動する移動機構(11)とを連結する支持部材(10)と、前記移動機構(11)に備えられた旋回機能を有する台座(13)とからなる多関節ロボット(1)において、前記移動機構(11)は、前記ハンド部(8)の移動方向と同方向にコラム(12)が配置され、前記移動機構(11)に配置された支持部材(10)は、前記ハンド部(8)の移動方向に直交する方向に突出し、前記多関節アーム(2)と連結されたものである。
(もっと読む)
ロボット及び物品搬送システム
【課題】機能を維持しながらもより小型化することができるようにした、ロボット及び物品搬送システムを提供する。
【解決手段】アーム部材23と、アーム部材23を揺動させるアクチュエータ22と、アーム部材23の先端に設けられるハンド部材24と、アーム部材23とハンド部材24とを回転可能に連結する関節部材と、アクチュエータ22を支持し直線駆動するリニアアクチュエータ3と、アクチュエータ22及びリニアアクチュエータ3を協働させての各ハンド部材を進退方向に直線移動させるコントローラとを有して構成する。
(もっと読む)
ベルトテンション調整装置
【課題】同時にベルト両辺のベルトテンションを偏りなく正確に調整することができ、しかも、誰が行っても簡易かつ短時間で正確なベルトテンションの調整を行えるようにする。
【解決手段】一方の片辺側ベルト15aに接する第1のアイドラ16が取り付けられ、ベルト走行方向と直角な方向に移動可能なようにケーシング12に取り付けられた第1のアイドラシャフト18と、他方の片辺側ベルト15bに接する第2のアイドラ17が取り付けられ、ベルト走行方向と直角な方向に移動可能なようにケーシング12に取り付けられた第2のアイドラシャフト23と、第1アイドラ16と第2アイドラ17のそれぞれの端部に螺合する左右逆ねじで同一リードになったねじ部を有する左右ねじシャフト30と、ケーシング12上に固定され、左右ねじシャフトを回転可能に支持する支持ブラケット32と、からベルトテンション調整装置を構成する。
(もっと読む)
人型ロボットの自動制御のための方法及び装置
【課題】 ロボット関節への多様な制御を提供する。
【解決手段】 ロボットシステム11は、物体に対し力制御を行う複数の関節を有する人型ロボット10と、ユーザーから入力信号を受け取るグラフィカルユーザーインターフェース(GUI)24と、コントローラ22とを備える。GUIは、ユーザーにコントローラへの直観的プログラムアクセスを提供する。コントローラは、入力に応じてロボットの物体レベル、エンドエフェクタレベル及び/又は関節空間レベルを各々制御するインピーダンスベースの制御フレームワークを使用して関節制御する。制御方法は、GUIを介し所望の力等の入力信号を受け取り、ホスト装置で入力信号を処理し、インピーダンスベースの制御フレームワークを介して関節制御する。フレームワークは、ロボットの物体レベル、エンドエフェクタレベル及び/又は関節空間レベルを各々制御し、機能ベースGUIが動作モードのミリアドの実施を簡単化する。
(もっと読む)
バッチローダーを有する二本アーム・サブストレート取扱いロボット
【課題】ロボットに基づいたサブストレートの大量移送のための改良技術を提供する。
【解決手段】サブストレート取扱いロボット20は第一アーム22と第二アーム26が接続されているアーム駆動機構34を含む。複数サブストレート・バッチローダー24が第一アーム22に接続され、単一面エンド・エフェクタ28が第二アーム26に接続されている。複数サブストレート・バッチローダー24は保持するサブストレート数を示す真空信号を生じる。真空信号インタープリータがサブストレート装荷数に応じて、第一アーム22の運動を代える。第二アーム26に接続されている対象物センサー58は、複数サブストレート・バッチローダー24に隣接するカセットの中のサブストレート数を査定する。サブストレート装荷順コントローラが、カセットの中のサブストレート数に応じて、アームの運動を制御し、複数サブストレート・バッチローダー24の完全装荷を促進する。
(もっと読む)
多関節アームおよび搬送装置
【課題】並進する多関節アームを提供する。
【解決手段】多関節アーム100は、ベース10と第1のリンク110で連結した第1のアーム101と、第1のアーム101と中間リンク130で連結した第2のアーム102と、第2のアーム102と第2のリンク120で連結したエンドエフェクタ200とを含む。第1のリンク110は、第1のアーム101に対して同期して動く第1の駆動歯車111と、ベース10に対して同期して動く第1の伝達歯車112とを含む。中間リンク130は、第2のアーム102に対して同期して動き、第1の伝達歯車112とタイミングベルト139により接続された中間の駆動歯車131と、第1のアーム101に対して同期して動く中間の伝達歯車132とを含む。第2のリンク120は、エンドエフェクタ200に対して同期して動き、中間の伝達歯車132とタイミングベルト129により接続された第2の駆動歯車121を含む。
(もっと読む)
双腕ロボット及びそのハンドリング方法
【課題】双腕ロボット及びそのハンドリング方法において、パレタイズ時にワークを適切な位置に整列積載する。
【解決手段】双腕ロボットは、左右一対で構成されたワークを保持する第1ハンド部2a及び第2ハンド部2bと、制御部とを備える。両ハンド部2a、2bは、それぞれ長爪21と可動する短爪22とを有する。両ハンド部2a、2bによってワークWaを保持しているとき、制御部は、先に第1ハンド部2aを退避させ、ワークWaの第1ハンド部2a側の隅部を降下させる。次に、制御部は、第2ハンド部2bを退避させ、ワークWaの第2ハンド部2b側の隅部を降下させ、ワークWaをワークWb上に積載する。これにより、先の第1ハンド部2aの退避時においても、またその後の第2ハンド部2bの退避時においても、各ハンド部の摩擦力が動摩擦となり、それぞれの動作時にワークがハンド部に引っ張られることがなくなる。
(もっと読む)
41 - 60 / 226
[ Back to top ]