
Fターム[3C007BT13]の内容
マニピュレータ、ロボット (46,145) | 手首のタイプ (749) | ハンド部を移動させるもの (155) | ハンドの向きと直角方向に移動させるもの (11)
Fターム[3C007BT13]に分類される特許
1 - 11 / 11
搬送ロボット
【課題】昇降駆動手段において必要となる昇降駆動力を低減することができる搬送ロボットを提供すること。
【解決手段】本発明の搬送ロボットは、第1軸線周りに回転可能に構成された第1リンク部材と、第1軸線に対して所定距離に位置する第2軸線周りに回転可能に構成された第2リンク部材と、第2軸線に対して所定距離に位置する第3軸線周りに回転可能であり且つ物品を保持可能に構成された保持部材と、少なくとも保持部材を昇降駆動するための昇降駆動手段と、を備える。第1リンク部材、第2リンク部材、及び保持部材が、この順番で連結されてアームリンク機構を構成しており、昇降駆動手段が、第1リンク部材と保持部材との間に配置されてアームリンク機構の一部を構成している。
(もっと読む)
長尺材曲げ加工用のロボットハンドおよび長尺材曲げ加工システム

【課題】吸着手段とグリッパとを備えたローディングが可能な長尺材用ロボットハンドの提供と、このロボットハンドを使用した長尺板材曲げ加工システムの提供。
【解決手段】1.ロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、前記吸着手段をワークの前後方向に移動位置決め可能に設けたことを特徴とする長尺板材曲げ加工用ロボットハンド。2.板材折曲げ加工機へワークを供給するロボットと、掴み換え装置とを備えた長尺板材曲げ加工システムにおいて、前記ロボットハンドがロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、吸着手段をワークの前後方向に移動位置決め可能に設けてなるこ長尺板材曲げ加工システム。
(もっと読む)
基板搬送装置、電子デバイスの製造システムおよび電子デバイスの製造方法
【課題】 より大きな駆動源、直動ガイド能力を必要とせず、小型化が可能な基板搬送装置を提供すること。
【解決手段】 基板搬送装置は、第1駆動軸と、第1駆動軸に一端が連結されたアーム部と、基板を保持することが可能な基板保持部と、アーム部の他端と基板保持部を連結する連結部と、を有する。連結部は、アーム部に対して基板保持部を回転可能に支持する回転支持部と、回転支持部によって基板保持部が回転する回転軸の方向に、アーム部に対して基板保持部を上昇させ、または、降下移動させる移動部と、を備える。
(もっと読む)
ワーク搬送装置
【課題】油飛散なく、高速に平行に直線的にワークを搬送することができるワーク搬送装置を提供する。
【解決手段】ワーク搬送装置10は、ロボット11と、ロボット11のアーム13の先端部に取り付けられ、ベルト21によって直線駆動されるキャリア29を有する直動機構20と、キャリア29に取り付けられたワーク把持機構23とを備える。
(もっと読む)
変形性薄物展開装置
【課題】人手で布地等の把持作業が行われる場合、その把持作業を従来よりも簡素化することができ、自動制御で布地等の把持作業が行われる場合、布地等を把持するまでの工程を比較的少なくすることができる展開装置を提供する。
【解決手段】布地の展開装置は、展開機構状態変化機構であるロボット本体と、ロボットハンド2Aを含む。ロボットハンド2Aは、2組のハンド機構21と、それらを接近離反させる第11スライド機構22A、第12スライド機構22Bを含む。ハンド機構21は1対のフィンガ部21Aを有する。布地CLを把持するときは、2組のハンド機構21を接近させフィンガ部の先端が斜め上方又は真横を向く状態とした後にフィンガを閉じて布地を把持し、その後把持したまま第11スライド機構22Aと第12スライド機構22Bによってハンド機構21を離間させる。
(もっと読む)
ワーク運搬装置
【課題】回動可能なアームに連結されたフレームと、そのフレームに支持された第1乃至第3のクランプ装置とを有し、その第1乃至第3のクランプ装置によってワークを把持して運搬するワーク運搬装置において、1台のワーク運搬装置によって、各種形態のワークを運搬できるようにする。
【解決手段】第1及び第2のクランプ装置9,9Aを互いに接近又は離隔可能にフレーム7に支持すると共に、第3のクランプ装置9Bを、第1及び第2のクランプ装置9,9Aのクランプ爪14,14Aを結ぶ直線Lに対して、直交する方向に移動可能にフレーム7に支持する。
(もっと読む)
ワーク移し替え方法、ワーク移し替えシステム及びワーク移し替え装置
【課題】視覚センサーなどを使用することなくガラスを機械的手段によって精度良く位置決めしてパレットから別のパレットへ移し替えることのできる低設備で且つメンテナンスも容易に行えるガラス移し替え装置を提供する。
【解決手段】車体の組み立て生産順番に従って、第1のパレットから所定のガラス3を取り出した後、組み立て生産順番となるように第2のパレットに移し替えて順次配列させる作業を繰り返し行うガラス移し替え装置。この装置では、ガラス3を吸着保持する吸着保持機構部27とガラスの奥行き方向のガラス保持位置をハンドリングロボット2の基準位置に合致させる位置調整機構部28とを備えた吸着保持位置調整手段21と、手首部分とハンドフレームとの間に設けられ、吸着保持位置調整手段で保持したガラスの幅方向及び縦方向のガラス保持位置を、ハンドリングロボット2の基準位置に合致させるガラス保持位置調整手段23とを備える。
(もっと読む)
ハンド装置
【課題】アーム部を移動させなくても把持機構部の向き及び位置を高精度で変えることができるハンド装置を提供する。
【解決手段】多軸機構部7の各第1超音波モーター44及び各第2超音波モーター45を駆動制御して、把持機構部5を該多軸機構部7のベース部41の平面41aに沿って移動させたり、把持機構部5を該ベース部41の曲面41bに沿って回転移動させたり、把持機構部5を該ベース部41の曲面41b上で自転させることができる。このため、アーム部6の屈伸動作による把持機構部5の位置決めを高精度で行うことができなくても、多軸機構部7により把持機構部5を微動で移動させたりその向きを変えたりして高精度で位置決めすることができる。
(もっと読む)
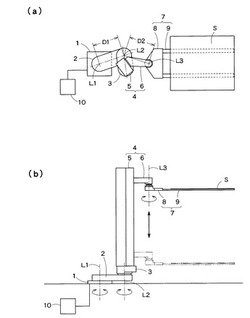
溶接ロボット
【課題】円筒材の溶接において、多間接ロボットの各々の間接を同時に動かして、溶接トーチの先端の速度および軌跡の制御を行う必要がなく、また、ポジショナーを使用することもなく、高速で高精度の円筒溶接を行う溶接ロボットを提供すること。
【解決手段】円筒材と円筒材との溶接または円筒材と平板との溶接を行う溶接ロボットにおいて、溶接トーチと、マニピュレータの先端に回動自在に備えられ上記溶接トーチを直線移動自在に滑動的に移動させるリニアガイド機構とを備えた溶接ロボット。
(もっと読む)
超音波診断システム並びにそのロボット制御装置及びロボット制御プログラム
【課題】 被検者の心拍による血管の動きがあっても、血管の計測点と超音波プローブとの相対位置関係がほぼ一定にする。
【解決手段】 ロボット制御装置13は、被検者Mの心電波形に基づいてロボットアーム12の動作を予測制御する予測制御手段17を備えている。予測制御手段17は、超音波診断装置11からの超音波画像を使って所定時間内における血管位置のサンプル波形を求め、当該サンプル波形と前記所定時間の心電波形とを対応させ、当該心電波形の各ピーク間の各サンプル波形を平均化することにより、ピークからの経過時間に対する血管位置の予測波形を求め、前記被検者の心電波形及び前記予測波形に基づき、前記計測点と前記超音波プローブとの相対位置関係をほぼ一定に維持するようにロボットアーム12を制御する。
(もっと読む)
改良型自動リベッティングシステム
本発明は、1つの装置を用いて同じ作業点で、ボーリング、リーミング、リベット挿入、リベッティング、クリーニング等の複数の動作を行うことを可能にするためにロボット化設備で用いられるタイプの改良型自動リベッティングシステムに関する。本発明は、それ自体は動かずにパラレル運動機械上に固定されるマルチツールヘッドを用い、パラレル運動機械は、マルチツールヘッドの全ての位置決め移動を行って、ツールヘッドに設けられた個別のツールの異なる物理的位置間のオフセットに対し必要な補正を行うシステムを特徴とする。本発明の主要な利点は、システムが、複雑なツールヘッド変更機構の必要性をなくすことにより、ボーリング及び他の機能について異なる直径を得るようにし、それにより、上記装置のコストが大幅に削減されるとともに、その信頼性、精度、及び機械的寿命が高まることである。  (もっと読む)
(もっと読む)
1 - 11 / 11
[ Back to top ]