
Fターム[3C007GS19]の内容
マニピュレータ、ロボット (46,145) | 把持装置交換 (231) | ハンド交換のための制御 (20)
Fターム[3C007GS19]に分類される特許
1 - 20 / 20
バラ積みピッキング装置および方法
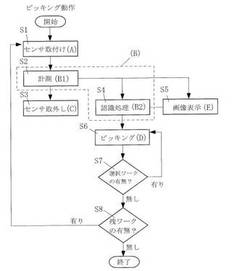
【課題】メッシュボックス等の容器にバラ積みされた複数のワークから、人による重量物のハンドリング作業なしにワークを1つずつピッキングすることができ、かつ容器内のワーク全体を高い位置精度で計測することができ、距離センサと容器及びワークとの干渉を無くすことができ、これによりピッキング時間を短縮し、ピッキングの成功率と装置の稼働率を高めることができるバラ積みピッキング装置および方法を提供する。
【解決手段】ハンド14によりハンドに距離センサ16を取り付け(S1)、ハンドを移動して、距離センサ16によりバラ積みされたワーク全体の3次元形状データをハンド14で計測し(S2)、かつ計測した3次元形状データからハンド14で把持可能なワーク1の位置と姿勢を認識し(S4)、ハンド14によりハンドから距離センサ16を取り外し、ハンド14により把持可能なワーク1を順に把持して搬送先に搬送する(S6)。
(もっと読む)
作業ロボット用エンドエフェクタ交換装置およびその一部を具える作業ロボット

【課題】取り扱う製品や部品の形状に合ったピッキング用ハンドや、ネジ締めドライバ、半田ごて等の作業ツールを素早く交換することが可能で、かつ位置決め用スタンド等の専用治具を必要としない作業ロボット用エンドエフェクタ交換装置を提供することにある。
【解決手段】各々識別標識を持つ複数のエンドエフェクタと、前記エンドエフェクタを任意の場所に保持するエンドエフェクタ置場と、前記エンドエフェクタ置場に保持された前記エンドエフェクタの前記識別標識を撮像する撮像手段と、前記撮像手段が撮像した前記エンドエフェクタの前記識別標識の画像に基づき前記エンドエフェクタの3次元位置を算出するエンドエフェクタ位置算出手段と、前記算出したエンドエフェクタの3次元位置を作業ロボットの作動制御装置に教示するエンドエフェクタ位置教示手段と、を具えてなる作業ロボット用エンドエフェクタ交換装置である。
(もっと読む)
ロボットハンドのツール着脱機構
【課題】ツールの交換時間が短く、かつ視覚センサなどのツールを取り付けた場合でもロボットのハンド部全体を軽量化・コンパクト化することができるロボットハンドのツール着脱機構を提供する。
【解決手段】1対の爪部材11,12が平行に開閉するロボットハンド10でツール20を着脱するロボットハンドのツール着脱機構。ツール20がツールベース22を有し、ツールベース22は、爪部材11,12の開動作又は閉動作により爪部材の一部と係合してその位置を位置決めする3以上の位置決め装置24を備える。
(もっと読む)
把持装置、ロボットシステム及び把持方法
【課題】把持対象物を把持する際に把持対象物を高精度に位置決めすること。
【解決手段】多指ハンド3は、掌部12と関節17,18を有する複数の指部13とを備え、掌部12及び複数の指部13で工具7を把持する。掌部12は、工具7の把持対象物側接触面25に接触させる掌部側接触面12aを有している。掌部側接触面12aには、把持対象物側接触面25に設けられた突起部26,27が挿入される穴部19,20が設けられている。そして、穴部19,20に突起部26,27が挿入されることにより、掌部側接触面12aの接線方向Tに対する工具7の位置決め及び掌部側接触面12aの法線nを回転軸心とした回転方向Rに対する工具7の位置決めがなされる。
(もっと読む)
加工システム及び加工方法
【課題】ツールの交換の際の通信時間及びロボットの移動時間を短縮すること。
【解決手段】締め付け機25が取り付けられたロボット22は、ツール101,102を取り付ける取り付け部91,92を有している。ロボット23の腕部には、交換用のツール411,412を収納する収納部材401が設けられている。ロボット制御装置は、ロボット22,23の各々の動作を制御することによって、ツール101,102が取り付け部91,92に取り付けられ、ツール411,412が収納部材401に収納されている第1の状態から、ツール101,102が収納部材401に収納され、ツール411,412が取り付け部91,92に取り付けられている第2の状態に遷移させる。
(もっと読む)
カメラ脱着ロボット装置
【課題】ワークが容器の隅に存在する場合であっても、容器の壁と干渉することなくワークを取出すことができるロボット装置を提供する。
【解決手段】ワーク16を認識して把持するロボット装置11。ワーク16を認識する画像認識装置21と、ワーク16を把持するロボットハンド15を有する動作機構19と、ロボットハンド15がワーク16を把持するように動作機構19を制御する制御装置20を備える。画像認識装置21は動作機構19に対して着脱可能となっている。
(もっと読む)
グリッパ装置およびそのストローク量変更方法
【課題】ツールチェンジャーや爪開閉以外のアクチュエータが不要で、グリッパの大きさが小型であり、把持位置の微調整が可能なハンド装置を提供する。
【解決手段】ワークを把持するチャック爪部と、前記チャック爪部を含み、前記チャック爪部の開閉方向と同方向に移動するスライダ部と、アクチュエータを備え、前記アクチュエータによって前記スライダ部と同方向に開閉動作するグリッパ本体と、前記スライダ部と前記グリッパ本体とを引っ張るように付勢するバネと、前記スライダ部に形成され前記グリッパ本体の突起形状の爪部分が嵌合する複数個の穴と、を備え、前記バネが伸びた状態にあるとき前記グリッパ本体を開閉させ、前記グリッパ本体の前記爪部分と前記穴との嵌合位置を変更するようにした。
(もっと読む)
一括保持トレイ及び三次元集積回路製造装置
【課題】三次元集積回路の段数に応じたチップサイズの変化やチップ中心位置のずれに対応することが可能な一括保持トレイを提供する。
【解決手段】一括保持トレイ46を、第一の吸引経路55を有する本体部47と、本体部47に着脱自在に装着されるアタッチメント48と、から構成する。アタッチメント48は、複数のチップ20を吸着する複数の吸着部50と、複数の吸着部50から気体を吸引する第二の吸引経路49と、を有する。アタッチメント48を本体部47に装着するとき、複数の吸着部50で複数のチップ20を吸着できるように本体部の47第一の吸引経路55がアタッチメント48の第二の吸引経路49に繋がる。複数のチップ20を吸着するアタッチメント48を本体部47に対して交換可能にすることで、三次元集積回路の段数毎のチップサイズの変化やチップ中心間ピッチの変化に対応することができる。
(もっと読む)
医療用マニピュレータ、及びその初期化方法
【課題】医療用マニピュレータの駆動部側と作業部側の位置関係の初期化を容易にする。
【解決手段】作業部11が新規装着された場合には、各カウンタ45b〜47bをリセットして、原点位置に対応する「0」とする。1回の手術中で作業部11が再装着された場合には、前回の分離時に復帰メモリ49に保存した各カウンタ45b〜47bのカウント値を読み出して、これをそれぞれセットする。新規装着か再装着かは、作業部11に設けられたシリアル表示部29に表示されるシリアル番号から判断する。
(もっと読む)
ロボットハンド装置およびそのようなロボットハンド装置のアーム調節方法
【課題】複数種類のワークに対して柔軟な対応を行うことができる安価なロボットハンド装置を提供する。
【解決手段】ワークをハンドリングするロボットハンド装置20は、ロボット1に取付けられるハンドベース21と、ワークを把持する把持部をそれぞれが備えている少なくとも二つのアーム30a〜30cと、アームに取付けられていてアームをハンドベースに磁力で結合する磁力発生部39とを具備する。さらに、少なくとも二つのアームのうちの一つのアームを一時的に保持するアーム保持機構部50を具備してもよい。
(もっと読む)
双腕ロボット
【課題】ロボットハンドの交換時間を短縮するとともに、専用の動力源を引くことなしに、また、ハンドの誤着を検出することができる双腕ロボットを提供する。
【解決手段】着脱可能なハンド105を備えたロボット100において、先端に多指ハンド104が取り付けられた多自由度の第1のアーム101と、前記着脱可能なハンド105を先端に取り付けた多自由度の第2のアーム102とを備えた双腕ロボット100において、前記多指ハンド104で前記第2のアーム102に取り付けたハンド105を交換する。
(もっと読む)
ロボットアームカップリング装置の脱落防止装置
【課題】ロボットアームカップリング装置の脱落防止装置の加圧流体圧回路を改良する。
【解決手段】稼働状態ではツールの重量等が分離方向に作用するカップリングの構造において、誤動作などに伴う脱落危険を回避する機構として、流体圧回路に分離圧が負荷されないように機械的に固定する機構を一つのバルブ構造にて実現したものであって、脱落危険を回避し、安全性を向上させたロボットアームカップリング装置の脱落防止装置をシンプルな機構にて実現するものであって、この安全バルブをバルブ操作する機構として、ツールプレートを検知してスプールを操作する機構とツール置き台を検知してバルブ本体側を操作する機構を別々に設けるこにより、2ポジション切替バルブを活用して脱落防止機構を実現。
(もっと読む)
ロボットアームカップリング装置の脱落防止装置
【課題】ロボット用ATCにおいて脱落防止機能を向上した流体圧回路を提供する。
【解決手段】着脱機構における係合構造がツールプレートを装着した状態にて、ツールプレート側の重量が分離方向の負荷となって働く構造であって、 着脱制御用の着脱シリンダはマスタプレート側に設けられており、ヘッド側を結合室、ロッド側を分離室とした2室構造であり、流体圧回路は、加圧流体供給源と前記着脱シリンダの間に形成され、途中に電磁切換バルブが設けられ、さらに、当該電磁切換バルブと前記分離室側の回路の途中に一つの脱落防止検出弁が設けられており、当該脱落防止検出弁は、マスタプレートとツールプレートの関係状態を検出する機構によって弁の位置が規制されるものである。
(もっと読む)
ノズル
【課題】実装ヘッドに装着することなく識別が可能なノズルを提供する。
【解決手段】実装ヘッド7に対して装着および離脱可能なノズル3であって、実装ヘッド7に取り付けられる取付部3aと、部品を吸着して保持する吸着部3bと、取付部3aと吸着部3bの間に設けられて吸着部3b側に反射面が設けられたフランジ部3cを備え、フランジ部3cの取付部3a側に、光によって識別される二次元コード30、32を刻印加工するとともに二次元コード30、32を囲繞する領域を平滑加工した。
(もっと読む)
自動工具交換装置の落下防止システム
【課題】システムの応答速度の低下による、不動作時間がほとんど発生しない自動工具交換装置の落下防止システムを提供すること。
【手段】第1ユニット1に具備させたシリンダー10の切離ポート10a又は接続ポート10bへの空気の供給により第1ユニット側の係止具11を移動せしめ、第1ユニット1に対して第2ユニット2を切離・接続することにより他の第2ユニットに交換する形式の自動工具交換装置において、外部電力3よりソレノイドバルブ6の切換えを行う態様で、切離ポート10a又は接続ポート10bへの空気の供給が可能となるようにしてある
(もっと読む)
ロボットハンドとロボットハンドのフィンガー交換装置
【課題】予めモジュール化してあるフィンガーユニットを積極的に脱着交換することで多種多様な部品の把持に対応できるようにした汎用性の高いロボットハンドを提供する。
【解決手段】予めモジュール化してある同種または異種の複数のフィンガーユニット3,4を共通のコモンベース2に着脱可能に装着する。フィンガーユニット3は二指把持タイプのものであって、対向配置した二つのフィンガー5または6を一つのモジュールとしてユニット化したものとし、例えば対向配置した二つのフィンガー5がそれぞれに単一または複数の関節10,11を有した関節型のものや、対向配置した二つのフィンガー6が互いに接近離間可能な直動型のものとする。
(もっと読む)
ロボットセルと、部材を交換並びにロボットセル内に貯蔵するための方法
ツール(11)並びに/若しくは製品(13)のような部材を交換並びに貯蔵するためのロボットセル(1)は、部材(11,12,13)を、ピックアップしてロボットセル外からロボットセル内に、またこの逆に移動させるのに適したロボット(3)と、このロボットの周りに少なくとも部分的に設置され、ロボットを用いてロボットセル外からロボットセル内に、またこの逆に交換若しくは貯蔵されなければならない部材の移動を可能にするようにインターチェンジ・ステーションを有する壁部と、少なくとも2つの位置を有する、壁部内のマガジン部分(4)と、ロボットを制御するための制御ユニットとを備えている。このロボットセルは、第1のプロセッサと、このプロセッサに相互接続されたメモリとをさらに有している。部材がインターチェンジ・ステーション内に位置されたとき、プロセッサは、メモリからのデータに基づいて、ロボットセル内の適切な位置を選択する。  (もっと読む)
(もっと読む)
トーチ位置検出装置及び位置誤差補正方法
【課題】トーチ位置を高精度に検出することができ、トーチ交換時に使用すれば、トーチ及びトーチをクランプする嵌合部の損傷等を防止でき、長期にわたって安定したトーチ交換が可能なトーチ位置検出装置及び位置誤差補正方法を提供する。
【解決手段】産業用ロボット1のアーム2に装着されたトーチ3aが相互に直交する3軸のうちの1軸に沿って進行している際に、トーチ3aの位置を検出するトーチ位置検出装置である。1軸方向に沿って進行しているトーチ3aの他の2軸方向の位置ずれを検出する位置検出器25を備える。トーチ3aを被検出部材24として、被検出部材24と、位置検出器2の検出部材26とのどちらか一方に、トーチ3aの進行方向に沿ったガイド用凹溝32を設ける。他方にガイド用凹溝32に摺接するガイド用凸部30を設ける。
(もっと読む)
サーボツール切離し/結合方法及びロボット制御装置
【課題】 サーボツールの切離し/結合に要する実質的な時間を短くして、ロボットの作業効率を向上させる。
【解決手段】 サーボツールの切離し位置への移動指令を出力(A1)。この移動の間、サーボツールのアンプへ停止指令の出力、動力線・信号線の断線エラーの無効化処理、サーボパラメータの無効化処理を開始する(A2)。電力供給停止を確認する(A3)。断線エラーの無効化処理、サーボパラメータの無効化処理の終了を確認する(A4)。ロボットが切離し位置に到達すると(A5)、サーボツールの機械的切離し処理を実行する(A6)。サーボツールの結合時も、機械的結合後の次の移動中に結合に必要なソフトウェア処理を実行する。ロボット移動中にサーボツールの切離し/結合に必要なソフトウェア処理がなされるから、サーボツールの切離し/結合処理が短い時間で行われ、ロボットの作業効率を向上させる。
(もっと読む)
ロボット手術用のツールメモリベースのソフトウェアの更新
ロボット手術および他のロボットアプリケーションで使用するためのロボット装置、システム、および方法、および/または医療機器、システム、および方法は、再利用可能なプロセッサおよび限定使用のロボットツールの両方、または医療用プローブを含む。限定使用の構成要素であるメモリは、プロセッサによってインプリメントされるデータを有する機械可読コードおよび/またはプログラミング命令を含む。プロセッサのプログラミングは、プロセッサによって構成要素からダウンロードした新しいデータを一度送ることによって更新することができる。以降の構成要素は、ダウンロードを繰り返さずに更新されたプロセッサを活用することができる。  (もっと読む)
(もっと読む)
1 - 20 / 20
[ Back to top ]