
Fターム[3C007HT07]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | 可撓性部材 (556) | テンション調整するもの (38)
Fターム[3C007HT07]に分類される特許
1 - 20 / 38
関節駆動機構
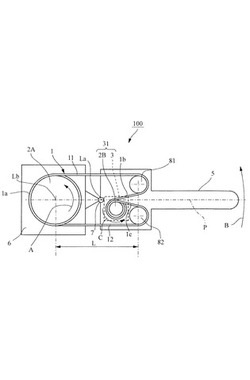
【課題】低剛性から高剛性まで幅広く関節剛性を調整する。
【解決手段】ベース部材6に対してリンク部5が揺動軸心La回りに揺動可能に連結されている。ベース部材6には駆動プーリ2Aが設けられている。リンク部5には一対の従動プーリ81,82が設けられている。紐状弾性部材1は、その中央部1aが駆動プーリ2Aに架けられ、各端部1b,1cが各従動プーリ81,82に架けられている。紐状弾性部材1の両端部1b,1cは、調整機構31の剛性調整用駆動プーリ2Bに巻き取られて駆動プーリ2A側に引っ張られ、剛性調整用駆動プーリ2Bを回転駆動することで、紐状弾性部材1の駆動プーリ2Aと各従動プーリ81,82との間の有効長さが調整される。
(もっと読む)
関節構造、及びその関節構造を備えたロボット

【課題】第1の部材に対する第2の部材の相対的な角度に応じて、伝動ベルトのテンションが増減する技術を提供する。
【解決手段】第1実施形態に係る関節構造Jは、関節軸Cを有する体幹部2と、体幹部2の関節軸C回りに回転可能となるように体幹部2によって支持される上腕部5と、体幹部2に回転可能に設けられ、肩関節駆動モータ34(駆動源)によって回転駆動される駆動プーリ11と、上腕部5に回転不能に設けられる従動プーリ12と、駆動プーリ11と従動プーリ12の間に掛けられる平ベルト13(伝動ベルト)と、を備えている。従動プーリ12の外周12aは略円形である。従動プーリ12の中心軸Dは、関節軸Cからずれている。
(もっと読む)
ダブルスカラーアーム
【課題】
ダブルスカラーアームの左右一対のアームを、バックラッシなしで同期させる。
【構成】
ダブルスカラーアームの先端のハンドにより、物品を移載する。左右一対のアームの先端の軸を上下一対の屈曲部材により互いに連結する。屈曲部材の一方を、一方の軸に一端を固定して時計回りに巻回し、他方の軸に反時計回りに巻回して他端を固定する。屈曲部材の他方を、一方の軸に一端を固定して反時計回りに巻回し、他方の軸に時計回りに巻回して他端を固定する。
(もっと読む)
調整ユニット
【課題】簡易な構成でワイヤの剛性を調整できるとともに、ワイヤに対して簡単に取り付けることができる調整ユニットを提供できるようにすることを目的とする。
【解決手段】調整ユニット10では、第2の支持部材12の挿通孔31と、圧縮コイルばね13の空芯領域G2とを通過させたワイヤWの湾曲部W1を、第1の支持部材11の係止部23に係止させるようにしたことで、分品点数が少なく簡易な構成でワイヤの剛性を調整できるとともに、ワイヤWを張架させた状態のまま、当該ワイヤWに対して簡単に取り付けることができる。
(もっと読む)
ワイヤ駆動式ロボット
【課題】 駆動源を可動部に搭載することなく複数方向への移動に対して正確で且つ迅速な制御を行い得る小型のワイヤ駆動式ロボットの提供。
【解決手段】 XθZ駆動方式のワイヤ駆動式ロボットにおいて、ロボットアームを旋回させるθ回転手段を備える昇降ベースと、昇降ベースの昇降軌道をZ軸方向に規制する昇降ガイドと、昇降ガイドを支持する走行ベースと、走行ベースの走行軌道をZ軸と直角なX軸方向に規制する走行ガイドと、走行ガイドを支持するベースフレームと、昇降ベースにZ軸方向への駆動力を与えるワイヤ駆動方式のZ軸駆動手段と、走行ベースにX軸方向への駆動力を与えるワイヤ駆動方式のX軸駆動手段と、
からなり、Z軸駆動手段及びX軸駆動手段の昇降駆動源及び走行駆動源をベースフレームに備えることを特徴とするワイヤ駆動式ロボット。
(もっと読む)
ベルトの駆動装置及びそれを備えたロボット
【課題】ベルト駆動装置やロボットの動作性能の低下を防止するとともに、ロボットのメンテナンス時期を通知することを課題とする。
【解決手段】ベースに対して回転可能な駆動プーリ7と従動プーリ8との間に掛けられて一定の張力が維持されるベルト6と、駆動プーリ7を回転させるサーボモータ11と、サーボモータ11を制御するコントローラ15と、張力を測定可能なロードセル10と、を少なくとも備えたベルト駆動装置において、コントローラ15が、ロードセル10の測定結果からベルト6の固有振動数を算出する自動設定部155を備え、測定結果が問題の無い張力であったとき、サーボモータ11を駆動するモータ駆動部152のノッチフィルタのカットオフ周波数として固有振動数を設定する。
(もっと読む)
ダブルハンドロボットの減速機構
【課題】
ダブルハンドロボットにおいて、下側に配された歯付ベルト伝動機構の組み立てと歯付ベルトの張力の調整を容易に行えるようにすることである。
【解決手段】
第2アームA2 の床板部2における下側の減速プーリユニットU2 が配置される部分は部分的に開口されて、当該下面部分開口3は下蓋体21により閉塞される構成にして、下側に配置される減速プーリユニットU2 の第2アームA2 の長手方向Qに沿った固定位置を当該第2アームA2 の下側から前記下面部分開口3を通して調整可能にすることにより、下側の減速プーリユニットU2 の軸心C41,C42とハンド旋回軸36,37の軸心C3 との軸心間距離L1,L2 を調整して、下側の歯付ベルトV22の張力を調整可能な構成とする。
(もっと読む)
ベルトテンション調整装置
【課題】同時にベルト両辺のベルトテンションを偏りなく正確に調整することができ、しかも、誰が行っても簡易かつ短時間で正確なベルトテンションの調整を行えるようにする。
【解決手段】一方の片辺側ベルト15aに接する第1のアイドラ16が取り付けられ、ベルト走行方向と直角な方向に移動可能なようにケーシング12に取り付けられた第1のアイドラシャフト18と、他方の片辺側ベルト15bに接する第2のアイドラ17が取り付けられ、ベルト走行方向と直角な方向に移動可能なようにケーシング12に取り付けられた第2のアイドラシャフト23と、第1アイドラ16と第2アイドラ17のそれぞれの端部に螺合する左右逆ねじで同一リードになったねじ部を有する左右ねじシャフト30と、ケーシング12上に固定され、左右ねじシャフトを回転可能に支持する支持ブラケット32と、からベルトテンション調整装置を構成する。
(もっと読む)
手術用マニピュレータ及び手術用マニピュレータシステム
【課題】 少ないアクチュエータの数でワイヤの張力調整を行うこと。
【解決手段】 手術用マニピュレータ11は、その先端側でピッチ方向に回転可能な支持体19と、ヨー方向にそれぞれ独立して回転可能となるように支持体19に支持された第1及び第2の先端プーリ21,22と、プーリ21,22にそれぞれ一体化された第1及び第2のブレード24,25と、第1のプーリ21に固定された第1及び第2のワイヤ51,52と、第2のプーリ22に固定された第3及び第4のワイヤ53,54と、第1〜第4のワイヤ51〜54を押し引きする第1〜第4のモータ56〜59とを備えている。第1及び第2のワイヤ51,52は、引張力が作用したときに、相反する方向に第1の先端プーリ21を回転させ、第3及び第4のワイヤ53,54は、引張力が作用したときに、相反する方向に第1の先端プーリ22を回転させる。
(もっと読む)
駆動機構
【課題】線状動力伝達部材の張力を調整できるとともに、構成の単純化及び小型化を実現する駆動機構を提供することにある。
【解決手段】駆動機構10では、駆動部であるアクチュエータ部31と一体に形成される流体給排部であるパイプ32の雄ねじ部33の一部と基端側壁部60の雌ねじ部64とが螺合することにより、アクチュエータ部31及びパイプ32が基端側壁部60に固定される状態で支持される。すなわち、流体給排部であるパイプ32が駆動部被支持部となっている。また、駆動部被支持部であるパイプ32の雄ねじ部33の雌ねじ部64との螺合位置が調整可能となっている。雄ねじ部33の雌ねじ部64との螺合位置を調整することにより、ワイヤ20のプーリ23に対する張力が調整される。すなわち、駆動部被支持部であるパイプ32に設けられる雄ねじ部33が線状張力伝達部材であるワイヤ20の張力を調整する張力調整部となっている。
(もっと読む)
水平多関節ロボット
【課題】水平多関節ロボットにおいて、高温基板搬送時の熱影響によるアームの姿勢変化を最小限に抑え、高精度な搬送を維持できるようにする。
【解決手段】ベルト111の張力を調整可能なテンション調整機構を有する水平多関節ロボットにおいて、テンション調整機構が、ベルト111に接触して張力を与えるアイドラ131と、アイドラ131を支持するとともにアームに対して第1支点119で回転可能に設けられたリンク118と、アームに対して第2支点117で回転可能に設けられ、リンク118の一部に接触するローラと、を備え、アームの温度上昇に伴って第1支点119と第2支点117とが離れると、リンク118がローラ117に接触しながら第1支点119で回転して張力を軽減するようにした。
(もっと読む)
基板搬送ロボット
【課題】 プーリの熱膨張による軸間距離が長くなりベルトのプーリ間の軸間距離が伸びる。これによる伝達ベルトの張力が過大からくるアームの反りや、ベルトの伸びや破断を引き起こさないようにする。
【解決手段】 各テンションプーリ23とそれを取り付ける固定ベース51の間に、テンションプーリ23を支持するプレート26を介在させ、プレート26は熱膨張率が各々異なる支持板A55と支持板B56を張り合わせることにより形成する。熱膨張時のバイメタル効果によりプレート26が曲がってテンションプーリ23の位置を変位させることにより、伝達ベルト24の張力の増減が相殺されてベルト張力を一定に保つ。
(もっと読む)
駆動装置及びこれを有するロボット
【課題】駆動ユニットの回転力を従動ユニットに伝達するケーブルに充分な張力を発生させることで、駆動ユニット及び従動ユニットとケーブルとの間に発生するスリップを防止し、回転力を損失なしに伝達する駆動装置及びこれを有するロボットを提供する。
【解決手段】駆動ユニット30と、前記駆動ユニット30と接触しないように離隔空間を挟んで設けられ、前記駆動ユニット30から発生した回転力を受けて回転する従動ユニット40と、前記駆動ユニット30と前記従動ユニット40とを連結し、前記回転力を前記従動ユニット40に伝達するケーブル50と、前記離隔空間に設けられ、前記ケーブル50に張力が発生するように前記ケーブル50が互いに接近する方向に前記ケーブル50を加圧する加圧ユニット60とを含んで駆動装置を構成する。
(もっと読む)
ロボット用把持ハンド
【課題】様々な形状および寸法の物品を安定把持できるロボット用把持ハンドを得る。
【解決手段】ロボット用把持ハンドは、物品を受け入れ得る開口部を持つベースと、ベース上で回転可能に支持され、中心軸心に沿って延びて中心軸心と同心のピッチ円上で互いに等角度離間して配置され、回転駆動される3つの回転軸と、回転軸に取り付けられて、解放位置あるいは間に物品を把持する把持位置に可動の把持指とを備え、回転軸および駆動装置が開口部に受け入れられる物品と干渉しない位置に配置されている。
【効果】様々な形状および寸法の物品を安定して把持できる。
(もっと読む)
力覚提示マニピュレータ
【課題】エンドエフェクタが並進3自由度運動を行う力覚提示マニピュレータを提供する。
【解決手段】本発明の力覚提示マニピュレータは、マニピュレータのベースと、エンドエフェクタと、駆動手段と、駆動手段の動力をエンドエフェクタの並進3自由度動作に変換する一対のリンク機構と、を備える冗長パラレルリンク機構を用いる。また、エンドエフェクタは、一対のリンク機構それぞれからの拘束により、空間位置に依らず姿勢を維持する。
(もっと読む)
ねじれ紐アクチュエータとそれを用いた義肢用アクチュエータユニット
【課題】ねじれ紐アクチュエータのスライド部材と駆動対象物を接続するワイヤの緩みを防止し張り具合を一定にする作業を短時間で行うことを可能にする。
【解決手段】ねじれ紐アクチュエータは、2本の紐を互いにねじり合わせた構造のねじれ紐1と、ねじれ紐1の基端側に接続された駆動機構部20と、ねじれ紐の先端側に接続されたスライド部材32と、その先端側と駆動対象物との間に接続されるワイヤ5とを備えている。駆動機構部20の作動に伴いねじれ紐1の長さが変化してスライド部材32がねじれ紐1の長手方向に変位し、その変位がワイヤ5を介して駆動対象物に伝達される。スライド部材32とワイヤ5との接続部に、ワイヤ5の張り具合を調整する調整手段7が設けられている。
(もっと読む)
水平多関節ロボット
【課題】水平多関節ロボットにおいて、高温基板搬送時の熱影響によるアームの姿勢変化を最小限に抑え、高精度な搬送を維持できるようにする。
【解決手段】アームが、駆動部1からの回転動作を伝達する伝達機構と、伝達機構を収容するアームケース201と、伝達機構を覆うようにアームケース201の上面に装着されるアームカバー214と、によって構成された水平多関節ロボットにおいて、アームカバー214が、アームケース201が延在する方向に複数分割された複数のアームカバーからなるよう構成し、さらに複数のアームカバー214が互いに折り重なる部分を形成した。
(もっと読む)
平行リンク駆動機構及びこの駆動機構を備えた搬送装置
【課題】アームの長さを長くしても小さい駆動力でスムーズに移動できる駆動手段を有する平行リンク駆動機構を提供すること。
【解決手段】一対の第1、第2アーム41、42と、一対の第1、第2連結アーム43、44とを平行に配設し、第1、第2連結アームのいずれか一方を静止アーム、他方を運動アームとして、静止アームの端部と第1、第2アームの一端部とを第1、第2支軸61、62及び第1、第2アームの他端部と運動アームの他端とを第3、第4軸支63、64をそれぞれ回動自在に支軸した平行リンク機構3と、この平行リンク機構を駆動する駆動手段と、を有し、静止アーム43には駆動手段GMを設け、駆動手段と運動アームの第3、第4支軸63、64との間に、伝動部材5を襷掛けに懸架して、駆動手段GMの駆動により、第3、第4支軸63、64のいずれか一方の支軸に結合された部分の伝動部材5A、5Bを牽引して運動アーム44を移動させる。
(もっと読む)
ワイヤ駆動機構、ロボットアーム機構及びロボット
【課題】軽量で、コンパクトにできるワイヤ駆動機構、ロボットアーム機構及びロボットを提供する。
【解決手段】回転軸2を中心に回転するプーリ1と、回転軸2と直交する方向で、回転軸2と同一平面上にあるように配置される回転軸4を中心に回転するプーリ3と、プーリ1周面の所定方向に巻きつけられるとともに、プーリ3周面にプーリ1の巻きつけ方向と反対方向に巻きつけられるワイヤ5を有し、一方のプーリ1の回転によるワイヤ5の引っ張り力により他方のプーリ3に駆動力を伝達可能にする。
(もっと読む)
ベルト伝動装置及びそれを備えたロボット
【課題】アイドラプーリを使用せずに簡単な構成でベルトのテンションを調整することができ、テンション調整部の省スペース化や軽量化を実現できるベルト伝動装置を提供する。
【解決手段】1対の回転軸に第1プーリ、第2プーリを配置し、第1の有端ベルトの一端を調整ブロックを介して第1プーリの外周上側に、他端を第2プーリの外周上側に取り付ける。第2の有端ベルトの一端は第1プーリの外周下側に、他端は第1のベルトの巻き掛け方向と逆にして第2プーリの外周下側に取り付ける。第1プーリには調整ブロックの取り付け部に案内部とネジ穴を設ける。ネジ穴へ挿入できるテーパ部を有するテンション調整ネジをねじ込むことによって、調整ブロックを案内部に沿って位置を調整し、第1と第2ベルトの両方のテンションを調整する。調整後はテンション調整ネジを取り外す。
(もっと読む)
1 - 20 / 38
[ Back to top ]