
Fターム[3C007HT09]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | 可撓性部材 (556) | 有端なもの (16)
Fターム[3C007HT09]に分類される特許
1 - 16 / 16
調整ユニット
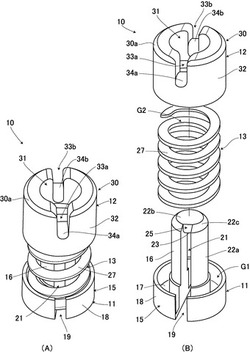
【課題】簡易な構成でワイヤの剛性を調整できるとともに、ワイヤに対して簡単に取り付けることができる調整ユニットを提供できるようにすることを目的とする。
【解決手段】調整ユニット10では、第2の支持部材12の挿通孔31と、圧縮コイルばね13の空芯領域G2とを通過させたワイヤWの湾曲部W1を、第1の支持部材11の係止部23に係止させるようにしたことで、分品点数が少なく簡易な構成でワイヤの剛性を調整できるとともに、ワイヤWを張架させた状態のまま、当該ワイヤWに対して簡単に取り付けることができる。
(もっと読む)
ワイヤ駆動式ロボット

【課題】 駆動源を可動部に搭載することなく複数方向への移動に対して正確で且つ迅速な制御を行い得る小型のワイヤ駆動式ロボットの提供。
【解決手段】 XθZ駆動方式のワイヤ駆動式ロボットにおいて、ロボットアームを旋回させるθ回転手段を備える昇降ベースと、昇降ベースの昇降軌道をZ軸方向に規制する昇降ガイドと、昇降ガイドを支持する走行ベースと、走行ベースの走行軌道をZ軸と直角なX軸方向に規制する走行ガイドと、走行ガイドを支持するベースフレームと、昇降ベースにZ軸方向への駆動力を与えるワイヤ駆動方式のZ軸駆動手段と、走行ベースにX軸方向への駆動力を与えるワイヤ駆動方式のX軸駆動手段と、
からなり、Z軸駆動手段及びX軸駆動手段の昇降駆動源及び走行駆動源をベースフレームに備えることを特徴とするワイヤ駆動式ロボット。
(もっと読む)
関節駆動装置及び多軸マニピュレータ
【課題】関節駆動装置の数を関節の数と等しくすることができ、駆動力伝達用の線状部材の経路長の変化を各関節部で解消することができるとともに、駆動力伝達用の線状部材の交換を短時間で容易に行うことができ、利便性を高めることができるようにする。
【解決手段】所定のリンク部材と次のリンク部材とを回転可能に接続する関節軸上に配設された関節部の駆動用の線状部材から駆動力を受けて回転することによって所定のリンク部材に対して次のリンク部材を回転させる被駆動部材と、関節軸上に配設された経路長補償ユニットであって、所定のリンク部材に対応して配設された他の関節部の駆動用の線状部材からの駆動力を、次のリンク部材に対応して配設された他の関節部の駆動用の線状部材に伝達するとともに、他の関節部の駆動用の線状部材の経路長の変化を吸収する経路長補償ユニットとを有する。
(もっと読む)
ねじれ紐アクチュエータとそれを用いた義肢用アクチュエータユニット
【課題】ねじれ紐アクチュエータのスライド部材と駆動対象物を接続するワイヤの緩みを防止し張り具合を一定にする作業を短時間で行うことを可能にする。
【解決手段】ねじれ紐アクチュエータは、2本の紐を互いにねじり合わせた構造のねじれ紐1と、ねじれ紐1の基端側に接続された駆動機構部20と、ねじれ紐の先端側に接続されたスライド部材32と、その先端側と駆動対象物との間に接続されるワイヤ5とを備えている。駆動機構部20の作動に伴いねじれ紐1の長さが変化してスライド部材32がねじれ紐1の長手方向に変位し、その変位がワイヤ5を介して駆動対象物に伝達される。スライド部材32とワイヤ5との接続部に、ワイヤ5の張り具合を調整する調整手段7が設けられている。
(もっと読む)
義手用アクチュエータユニット
【課題】ねじれ紐式アクチュエータを複数組備えた義手用アクチュエータユニットにおいて、駆動機構部を含む複数のねじれ紐アクチュエータを空間的に効率よく配置することができる構造を提供する。
【解決手段】ねじり紐アクチュエータは、2本の紐を互いにねじり合わせた構造のねじれ紐1と、ねじれ紐1の基端側に接続された駆動機構部20と、ねじれ紐の先端側に接続されたスライド部材32とを備え、駆動機構部の作動に伴いねじれ紐1を構成する2本の紐のねじれが強められたり緩められたりすることによりねじれ紐1の長さが変化し、その結果、スライド部材32がねじれ紐1の長手方向に変位する。複数組の長尺状のねじり紐アクチュエータが、略円筒形状の周方向に沿って並ぶように、かつ、各ねじり紐アクチュエータの長手方向が略円筒形状の軸方向に沿うように配置されている。
(もっと読む)
平行リンク駆動機構及びこの駆動機構を備えた搬送装置
【課題】アームの長さを長くしても小さい駆動力でスムーズに移動できる駆動手段を有する平行リンク駆動機構を提供すること。
【解決手段】一対の第1、第2アーム41、42と、一対の第1、第2連結アーム43、44とを平行に配設し、第1、第2連結アームのいずれか一方を静止アーム、他方を運動アームとして、静止アームの端部と第1、第2アームの一端部とを第1、第2支軸61、62及び第1、第2アームの他端部と運動アームの他端とを第3、第4軸支63、64をそれぞれ回動自在に支軸した平行リンク機構3と、この平行リンク機構を駆動する駆動手段と、を有し、静止アーム43には駆動手段GMを設け、駆動手段と運動アームの第3、第4支軸63、64との間に、伝動部材5を襷掛けに懸架して、駆動手段GMの駆動により、第3、第4支軸63、64のいずれか一方の支軸に結合された部分の伝動部材5A、5Bを牽引して運動アーム44を移動させる。
(もっと読む)
物品の直線搬送装置、及び当該装置におけるベルト体の張力調整方法
【課題】
第1及び第2の各平行リンク機構の連結部に設けられたベルト伝動機構を構成する一対のベルト体の張力調整を容易にすることである。
【解決手段】
第1及び第2の各平行リンク機構LD1 ,LD2 が中間リンク台Eで連結されて、当該中間リンク台Eを構成する上下一対の中間リンク板5が左右一対の中間連結軸S3a, S3bで連結されて、当該中間連結軸S3a, S3bに支持された左右一対の各プーリ体P1,P2 に互いに逆方向の第1及び第2の各ベルト体V1,V2 が部分巻回されて、中間リンク台Eにおいて第1平行リンク機構LD1 の正逆両方向の回動力を第2平行リンク機構LD2 に伝達させる構成の物品の直線搬送装置において、前記一対のプーリ体P1,P2 の一方を軸方向に二分割して、各分割プーリ体P1a, P1bに対して前記一対のベルト体V1,V2 の一端部をそれぞれ固定した構成とする。
(もっと読む)
マニピュレータ機構
【課題】十分な強度の付与と軽量化を両立させることが出来、然も過大な外力の作用によってアームが折れ曲がったときにも復旧が可能な伸縮式のマニピュレータ機構を提供する。
【解決手段】本発明に係るマニピュレータ機構は、先端部に先端機構3を具えたアーム1と、該アーム1の基端部が連結されて該アーム1の巻き取り及び繰り出しを行なうアーム繰り出し装置2とを具え、アーム1は、弾性を有する複数本のテープ41を束ねてなるテープ集合体4と、該テープ集合体4の長手方向に間隔をおいてテープ集合体4に装着された複数の拘束部材5とを具え、該拘束部材5には、前記複数本のテープ41が貫通して該複数本のテープ41の相対位置を一定に保つためのガイド溝51が開設されている。
(もっと読む)
可動軸駆動装置およびロボット装置
【課題】複数の可動軸を少ない動力で駆動するとともに、動力から遮断したり外力が加わった場合にも関節の自由かつ自然な動きを担保する。
【解決手段】本発明の可動軸駆動装置は、1本の主軸上に配設された1以上の可動軸ユニットと、前記主軸を回転駆動する動力手段とを具え、前記可動軸ユニットがそれぞれ、駆動対象部位へ動力を伝達する巻き取りドラムまたはクランクと、前記主軸と前記巻き取りドラムまたはクランクとを伝達トルクを調整可能に接続あるいは断続するクラッチと、一端が前記巻き取りドラムまたはクランクに固定され他端が装置フレームに固定されたコイルバネとを具える。
(もっと読む)
ロボットおよびマニピュレータ
【課題】 小型軽量化が可能で、簡易な機構でありながら高信頼性、高剛性および広動作範囲で動力を伝達する。
【解決手段】 動作伝達機構は、可撓性動力伝達機構51と、入力回転軸52と、駆動側リンク53と、従動側プーリ54とを有する。駆動側リンク53と従動側プーリ54とをワイヤ51で接続し、駆動側リンク53とワイヤ51との接続を二重にするか、あるいはカシメ部材56と固定部材84で固定するため、駆動側リンク53に多大な負荷がかかってもワイヤ51が切れにくくなり、信頼性および安全性が高くなる。
(もっと読む)
脚式ロボット
【課題】股関節軸、膝関節及び足関節軸にある各プーリに弾性力を作用させ、各プーリを連結し、該プーリ同士の大きさを調節することによって、加速度センサ、角速度センサ、力センサ等のセンサを利用する制御系を使用することなく、脚の機構的構造自体によって安定性を実現することができ、センサや制御系の故障による影響を受けず、信頼性が高く、構造が簡素で、コストを低くすることができるようにする。
【解決手段】股関節軸、膝関節軸及び足関節軸の各々の変位角に比例する関節軸トルクを発生する弾性要素と、股関節軸において腰部リンクに固定されたプーリと膝関節軸において脛部リンクに固定されたプーリとに弾性力を作用する弾性要素と、膝関節軸において腿部リンクに固定された小径プーリと、足関節軸において足部リンクに固定された大径プーリと、小径プーリの円周部と大径プーリの円周部とを連結するワイヤとを有する。
(もっと読む)
4足歩行型法面作業ロボット
【課題】本発明は法面作業ロボット本体に働く重力を2本のワイヤー牽引で打ち消し、法面作業ロボット本体が自由に動けるようにするとともに、2本のワイヤーに必要以上の牽引力が作用するのを防止することができる4足歩行型法面作業ロボットを得るにある。
【解決手段】4足歩行型法面作業ロボット本体と、この法面作業ロボット本体を法面の異なる上部位置より吊り下げる一端部がそれぞれウインチに巻き取られた2本のワイヤーと、この2本のワイヤーに加わる張力をそれぞれ測定する2個のロードセルと、法面作業ロボット本体に働く重力を2本のワイヤーの牽引で打ち消し法面作業ロボット本体が自由に動けるように2個のロードセルに加えられる荷重を設定する制御装置とで4足歩行型法面作業ロボットを構成している。
(もっと読む)
移動体の転倒防止装置及び移動体を支える方法並びにプログラム
【課題】 ヒューマノイドロボットを演技させる際に、その転倒を防止する。
【解決手段】 ワイヤを繰り出したり引き込むためのワイヤ伸縮機構1乃至3を備え、これらはそれぞれ異なる位置に設けられる。さらに、複数の前記ワイヤ伸縮機構からの複数のワイヤに接続された交点部と、前記交点部に設けられてその下方を撮影する撮像部51と、一端が前記交点部に接続され、他端が前記交点部の下方に位置する移動体に接続された移動体吊り上げ用ワイヤと、複数の前記ワイヤ伸縮機構を制御する制御部100とを備える。前記撮像部で撮影した前記移動体の画像に基づき前記移動体と前記撮像部の相対位置関係を求め、求めた相対位置関係に基づき複数の前記ワイヤ伸縮機構を駆動して、前記交点部を前記移動体の動きに追従させる。
(もっと読む)
多関節指機構
【課題】小型化に好適な多関節指機構を提供する。
【解決手段】従動プーリ14を関節5の軸5aに接続固定し、従動プーリ14を連結片2aを介して指胴部2に連結しており、モータ11の出力軸の回転を各ワイヤー25を介して従動プーリ14に伝達して、従動プーリ14、関節5の軸5a、及び指胴部2を共に回転させている。このため、従来の様に中間プーリを必要とせず、指胴部2(各関節5、6間の距離)を短くすることができる。
(もっと読む)
嚥下ロボット装置
【課題】 嚥下のメカニズムを解明すべく嚥下動作をロボットによって再現する。
【解決手段】 嚥下ロボット装置は、口腔期においては、板バネ12の舌尖側の取り付け孔12を凹状に変形し、その位置の形状を元に戻すと共に隣り合う舌根側の取り付け孔12位置を凹状に変形することを、舌尖側の位置から前記舌根側の位置まで順次行う。その結果、舌部材10の舌背10Aが舌尖方向から順に隆起して、舌部材10と上顎部材160との間にある食塊が、咽頭壁シート120の方向へ運搬される。
(もっと読む)
ロボット
【課題】 ロボットの作動を停止するためにアクチュエータに加える電力供給を停止しても、ワイヤが弛緩しないロボットを実現する。
【解決手段】 ロボットは、一方側部材16と、その一方側部材16に回転可能に接続されている他方側部材18と、一端部が前記他方側部材18に接続されているワイヤ30、31、32と、そのワイヤ30、31、32の他端部に接続されており、電力が供給されるとワイヤを伸縮するアクチュエータ22、23、24を備えている。このほかに、電力が供給されると前記アクチュエータ22、23、24をロックするロック手段と、前記アクチュエータ22、23、24に供給する電力がオンであればオフに反転し、オフであればオンに反転し、反転した電力を前記ロック手段に供給する反転手段を備えている。
(もっと読む)
1 - 16 / 16
[ Back to top ]