
Fターム[3C007KS09]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | 作業対象物の状態 (971) | 大きさ、重さ (51)
Fターム[3C007KS09]に分類される特許
1 - 20 / 51
ロボットアーム及びロボットアームの制御方法
【課題】ロボットアームの軌道に障害物がある場合でも、迅速に障害物を退避し、タスクを効率よく実行する。
【解決手段】ハンド部5と、複数の関節11,12,13と、ハンド部5及び関節11,12,13とを連結する複数の連結部14,15,16,17とを有するロボットアーム1であって、ハンド部5が物体を把持して移動する工程と、関節13に備えられたひじあて部6が障害物を押圧する工程と、を有する。
(もっと読む)
寸法測定装置および寸法測定装置を備えた荷搬送ロボット

【目的】寸法測定装置および荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、エリアセンサ26と左右一対のアーム17を設け、アーム17の先端付近には対向する内側に向けて突設された手先部30が傾動可能に設けられる。手先部30を荷の基端面W1の左右端面に当接可能な位置でアーム17を伸縮させることで、荷Wの側面に当接し傾動した状態の手先部30は荷の遠端面W2において傾動状態から復帰し、そのときのアーム17の伸長量から遠端面W2の位置を算出する。荷Wの奥行寸法は、エリアセンサ26により測定した本体16からの基端面W1の位置と、手先部30が傾動復帰したときの遠端面W2の位置から演算する。
(もっと読む)
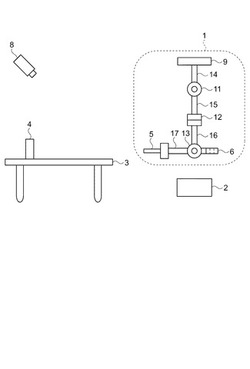
作業補助装置
【課題】従来に比して、製造ラインでのレイアウト性及び生産効率を向上できる作業補助装置を提供すること。
【解決手段】ワークWを保持するアタッチメント5を有し、作業者Sが付加する操作力に基づいてワークWを搬送するアーム3と、アーム3を駆動させるエアシリンダ21と、エアシリンダ21に出力するエアの圧力を調整する電空レギュレータと、電空レギュレータと通信可能に設けられて、電空レギュレータの出力エア圧を制御する制御装置7と、を備えることを特徴とする作業補助装置1である。
(もっと読む)
計測機能付きチャック装置及びロボットチャック装置
【課題】計測機構が小型軽量で且つ適切に収容され、測定圧を一定にして計測精度をより向上できる計測機能付きチャック装置及びロボットチャック装置を提供すること。
【解決手段】一方の電極11Aに対し、他方の電極12Aが、所要の間隔を保ちつつスライド可能に配されたセンサー部10Aと、両電極11A、12Aに関する静電容量を検出する容量検出素子40と、容量検出素子40によって得られた信号に基づいて計測情報を出力する計測情報出力回路50と、一方の電極11Aが固定される基部20と、ワークに対して接離動可能に設けられてワークに当接されるチャック用可動爪部30Aと、チャック用可動爪部材30Aに乗った状態で付勢部材39によってワークへの当接方向へ付勢されると共にその付勢部材39の付勢力に抗して後退可能に配されたワークへの計測用接触部37を備え、且つ他方の電極12が一体の計測用可動部材36とを具備する。
(もっと読む)
ロボットの駆動装置、ロボットの駆動方法、およびロボット
【課題】多関節の指部を備えたロボットを簡単な制御で駆動する。
【解決手段】対向して設けられた複数本の指部を用いて対象物を把持するに先立って、複
数の関節を備えた指部の形状を、対象物に応じて定められた把持形状に変形しておく。そ
して、指部の形状を把持形状に保持したまま、対向して設けられた複数本の指部を用いて
、対象物を把持する動作を行う。こうすれば、対象物が変更された場合でも、新たな対象
物に応じた把持形状に指部を変形させるだけで、迅速に且つ適切に対象物を把持すること
ができる。しかも把持動作は、グリッパー型のロボットと同様に簡単な制御で実現するこ
とが可能となる。
(もっと読む)
ロボット装置
【課題】把持対象物の把持状態を維持することが可能な把持形態を選択することが可能なロボット装置を提供する。
【解決手段】このロボット装置100は、ロボットアーム10と、ロボットアーム10の先端に設けられた多指ハンド部20と、視覚センサ30による検出により、把持対象物110の位置情報および形状情報を取得する画像処理部43と、把持対象物110の位置情報および形状情報に基づいて多指ハンド部20による把持形態の候補を複数抽出するとともに、抽出された複数の把持形態の候補についての多指ハンド部20の関節トルクに基づいて、抽出された複数の把持形態の候補の中から1つの把持形態を選択する制御装置40とを備える。
(もっと読む)
移載装置
【課題】ワークの移載時間を短縮することが可能な移載装置を提供する。
【解決手段】移載対象となるワーク20を収容する容器11と、予め決められた検出領域に存在するワーク20の位置及び姿勢を検出するセンサ12と、センサ12の検出結果に基づいてワーク20を取り出し、移載先に移載するロボット13とを備え、センサ12は、複数の検出領域を記憶する領域記憶部25と、複数の検出領域をそれぞれ切り替えるための切り替え条件を記憶する条件記憶部26と、切り替え条件を満たした場合に複数の検出領域を予め決められた順番に切り替える制御部27とを有する。
(もっと読む)
ロボットの負荷推定装置及び負荷推定方法
【課題】オンラインで特定動作を必要とせず、ロボットが把持するワークの重量及び重心位置を推定する装置を提供する。
【解決手段】ワーク重量を想定せずにモータに向けて送られたトルク指令と把持されたワークの重量に応答して現実に生じているトルクとの差異に着目してワークの重量を推定する。ロボットに作用する重力トルク及び摩擦トルクを演算する手段(27)と、現実に生じているトルクから重力トルク及び摩擦トルクを減算することにより正味の外乱トルクを演算する手段(24)と、正味の外乱トルクをロボットの手先力及び手先モーメントに変換する手段(25)と、負荷が追加される前にロボットの手先に生じている第1の手先力推定値と、負荷が追加され微小量だけ持ち上げた後にロボットの手先に生じている第2の手先力推定値との差分を計算することにより負荷の重量を推定し、同様にして第1及び第2の手先モーメントの差分を計算することにより負荷の重心位置を推定する手段(26)とを備えている。
(もっと読む)
コンロッドのクランプ装置
【課題】コンロッドを加工装置で機械加工する際に、様々な車種に対応するために形状や大きさの異なるコンロッドであっても簡易な構成でクランプすることができる、コンロッドのクランプ装置を提供する。
【解決手段】本実施形態に係るクランプ装置10は、取付け部20に固定された状態で前方に延出する棒状の支持部31と、該支持部31に連結された状態で同じく前方に延出する棒状の可動部51とを備え、支持部31及び可動部51に、位置決め機構、大端部クランプ機構、小端部クランプ機構、第一の駆動機構等の各機構が配設される。
(もっと読む)
ハンドおよびマニプレータ装置
【課題】ワークの大きさが変化しても把持力を一定にでき、かつ、小型化を実現できるハンドを提供すること。
【解決手段】ハンド5は、アーム6の先端に設けられて異なる大きさのワークを把持する。このハンド5は、アーム6の先端に固定された固定部20と、この固定部20に接近または離間可能な可動部30と、を備える。固定部20は、所定方向に延出する2本の第1フィンガ22A、22Bを有し、可動部30の他方は、第1フィンガ22A、22Bに略平行に延出する3本の第2フィンガ32A〜32Cを有する。可動部30は、第2フィンガ32A〜32Cが第1フィンガ22A、22Bに対して略平行である状態を維持しつつ、この固定部20に対して接近または離間する。
(もっと読む)
物品保持装置
【課題】物品を非接触で保持する物品保持装置において、物品の保持及び解除を迅速に行えるようにする。
【解決手段】物品保持装置20は、ガラス基板を非接触で保持する装置であり、装置本体21と、ファン制御部30と、を備えている。装置本体21は、ケース22と、ファン24と、吸い込み口26と、吹き出し口28と、を有している。ケース22は、ガラス基板に対向可能な物品対向部42及び内部に設けられた空間40aを有している。ファン24は、ケース22の空間40aに配置され、気体を吸い込んで吹き出す。吸い込み口26は、ファン24の吸い込み側と連通する。吹き出し口28は、吸い込み口26と異なる位置で物品対向部42に配置され、ファン24の吹き出し側と連通する。ファン制御部30は、ガラス基板を保持可能にファン24の回転速度を制御する。
(もっと読む)
計測機能付きチャック装置及びロボットチャック装置
【課題】計測機構が小型軽量で且つ適切に収容され、計測精度を向上できると共に、安価に製造できる計測機能付きチャック装置及びロボットチャック装置を提供すること。
【解決手段】一方の電極11に対し、他方の電極12が、所要の間隔を保ちつつスライド可能に配されたセンサー部10と、両電極11、12に関する静電容量を検出する容量検出素子40と、容量検出素子40によって得られた信号に基づいて一方の電極11に対する他方の電極12の変位に関する計測情報を出力する計測情報出力回路50と、一方の電極11が固定されると共に、計測と同時に保持されるべきワークの一端側に当接されるストッパ部22を有するチャック用基部20と、他方の電極12が装着されて一体となってストッパ部22に対して接離動可能に設けられ、前記ワークの他端側に当接されるチャック用可動爪部30とを備える。
(もっと読む)
移送システム
【課題】本発明は、異形の混在した箱物の大きさを検出して、正確に移載するロボットシステムを提供する。
【解決手段】
カセットに積載された箱物3を移載する移送システムであって、前記箱物3を積載した前記カセットと、前記カセットに少なくとも2つのアーム7R、7Lを挿入し、前記箱物3を移載する双腕ロボット1との間に、コンベア2を介して対向するように配置されたものである。
(もっと読む)
制御装置および方法、並びにプログラム
【課題】ロボットハンド装置において、薄膜物体を把持しているか否かを精度よく検出できるようにする。
【解決手段】ロボットハンド装置の指先の法線方向とせん断方向の各力を検出し、検出された各力を用いて摩擦係数を演算する。あらかじめ指先同士の最大摩擦係数から閾値を求めておき、閾値と演算された最大摩擦係数とを比較して、最大摩擦係数が閾値の範囲内であるか否かを検出する。これにより、薄膜物体が指先に把持されているかどうかを検出する。
(もっと読む)
ロボットの制御方法
【課題】 ロボットの各軸モータトルク値とアーム角度からロボットに備える負荷の質量と重心位置を算出する方法において、回転中心軸が直交する2軸を含む複数のアームのモータトルクとアーム角度を計測し、これより算出される負荷重力に起因するトルク成分の振幅・位相を算出し、回転中心軸が直交する幾何学的関係とから、負荷の質量及び重心位置を算出することで、アーム先端2軸の動作のみの少ない動作領域で算出出来る。しかし、CPUの処理性能によっては振幅・位相の算出時の複雑な計算で計算誤差が生じる可能性があった。
【解決手段】 直交する2つの回転軸の各軸ごとに所定の位置とそこから90°回転させた位置の2点の負荷質量に起因する重力トルクを求める。求めた重力トルクとアームの機構的特性を考慮することで複雑な計算をすることなく簡便に負荷の質量・重心位置を算出する。
(もっと読む)
パレタイズ装置
【課題】パレタイズ装置において、簡単な構成により、ワークやパレットに寸法ばらつきがあっても、パレタイズ時のワーク間の干渉やパレタイズされたワーク間の隙間の発生を防止して柔軟に、且つ高速にパレタイズ可能とする。
【解決手段】本装置1は、ワークを把持するハンド部2と、ハンド部2を移動させるアーム部3と、積載したワークの位置情報を取得する計測部5と、前記情報を記憶する記憶部6と、各部の動作を制御する制御部10と、を備えている。制御部10は、ワークを把持したハンド部2を移動させてパレットにワークを積載した際に、計測部5によってそのワークの積載位置を取得して記憶部6に記憶させ、次のワークをパレットに積載する際に、記憶部6に記憶されている積載位置に基づいて、ワークの積載予定位置を決定する。既積載ワークの積載位置を基準にするので、ワークやパレットの寸法変動に対応でき干渉や隙間の発生を防止できる。
(もっと読む)
把持装置及びその制御方法
【課題】物体把持時における指先剥離に対応して、指先と把持物体が滑らないように接触を保つ。
【解決手段】指が物体に接触した状態で、各指の基準座標系で構成される多角形の外接円の中心を疑似中心として計算し、各指の指先接触点から疑似中心へ向かう方向を接触力の向きに決定し、該向きが決定された各接触力にその大きさを与え、各指のハンド座標系の各軸方向の分力を決定する。外乱印加時に、把持物体の位置及び姿勢の変化量に比例した反力を各指の接触点における接触力に変換し、この接触力を基準把持力に重畳させる。
(もっと読む)
双腕ロボット
【課題】ロボットハンドの交換時間を短縮するとともに、専用の動力源を引くことなしに、また、ハンドの誤着を検出することができる双腕ロボットを提供する。
【解決手段】着脱可能なハンド105を備えたロボット100において、先端に多指ハンド104が取り付けられた多自由度の第1のアーム101と、前記着脱可能なハンド105を先端に取り付けた多自由度の第2のアーム102とを備えた双腕ロボット100において、前記多指ハンド104で前記第2のアーム102に取り付けたハンド105を交換する。
(もっと読む)
自動塗布システム、および自動塗布システムの制御方法
【課題】高精度かつ高品位な接触塗布を行える自動塗布システムおよび自動塗布システムの制御方法を提供する。
【解決手段】被塗布物と接触して該被塗布物に塗布液を塗布するディスペンサーチップ180を有するサーボガン100をロボットアーム200で操作して、被塗布物にディスペンサーチップ180を接触させた状態で移動させ、サーボガン100に接触塗布を行わせ、ロボットアーム200にサーボガン100とともに装着され、サーボガン100が被塗布物上に形成した塗布液の塗布パターンをCCDカメラ800で撮影し、画像処理903で撮影画像データを解析して得た塗布液の塗布パターン形成状態に関する情報に基づき、サーボガン100の塗布動作、またはロボットアーム200の動作をフィードバック制御する。
(もっと読む)
ロボット用マニピュレータ
【課題】表面構造を部位によって最適化したロボット用マニピュレータを提供することを課題とする。
【解決手段】ロボット用マニピュレータ1であって、構造部2の表面側に設けられる圧力センサからなるセンサ部3と、少なくともセンサ部3を覆う被覆材からなる被覆部4とを備え、被覆部4は、指先からの距離に応じて厚さ及び/又は硬さの異なった被覆材4a,4b,4c,4eが配置されることを特徴とし、また、センサ部3は、指先からの距離に応じて分解能が異なった圧力センサが配置されることを特徴とする。
(もっと読む)
1 - 20 / 51
[ Back to top ]