
Fターム[3C007KT15]の内容
マニピュレータ、ロボット (46,145) | 視覚装置、画像化装置 (2,194) | 画像表示 (109)
Fターム[3C007KT15]の下位に属するFターム
時系列表示 (7)
主にマニピュレータの表示 (33)
ワークの表示 (48)
Fターム[3C007KT15]に分類される特許
1 - 20 / 21
ロボット装置
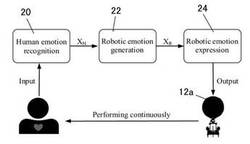
【課題】 人の表情から人の情動を認識し、情動同調の手法を利用して制御するロボット装置を提供する。
【解決手段】 ユーザに視認させる表情を表出する表出部12aと、ユーザの表情に基づいてユーザの情動状態を解析する情動認識部20と、ロボットの情動状態を、情動認識部20によって認識されたユーザの情動状態に誘導するようにロボットの情動状態を生成する情動生成部22と、情動生成部22により生成されたロボットの情動状態に基づいて、ロボットから表出させる表情を生成する情動表出部24とを備える。
(もっと読む)
情報処理装置および情報処理方法

【課題】過去の映像を用いてユーザ操作を支援するための補助的情報を提示する。
【解決手段】情報処理装置100は、任意の位置および向きを示すポインタを含む所定空間内の大域映像を取得する大域映像取得部104と、前記大域映像から前記所定空間内の位置情報を取得する位置情報取得部108と、前記所定空間内で撮像された映像データと、前記映像データの撮像された位置および向きの情報を含む映像情報とを関連付けて記憶している記憶部と、前記ポインタの示す位置および向きに対応する前記映像データを、前記大域映像に重畳して表示画面に表示する映像表示部101と、を備える。
(もっと読む)
ロボット制御システム及びロボット制御方法
【課題】ユーザが、室内の所望の場所のみの掃除を行わせる作業等(その内容を確定させるために場所の指定を必要とする作業)をロボットに容易に行わせることが可能な環境を実現できるロボット制御システムを提供する。
【解決手段】ロボット制御システムを、ディスプレイ21上に、管理対象エリアの状況/様子を示す画像を表示するシステムであって、ディスプレイ21に表示されている画像上にユーザによって描画された線分図形の形状及び位置から、ロボット25に行わせるべき作業の内容を把握し、把握した内容の作業を行うようにロボット25を制御するシステムとして構成しておく。
(もっと読む)
遠隔操作支援装置および遠隔操作支援プログラム
【課題】対象物の位置や姿勢が事前に判らない場合においても、任意の方向から対象物を確認することを可能としつつ、対象物の遠隔操作を支援できるようにする。
【解決手段】環境データ取得手段21aは、レーザスキャナ14にて計測された対象物11上の点群データを環境データ15として取得し、対象物モデル表現手段21bは、対象物11についての環境データ15に基づいて三次元認識処理17を行うことにより、対象物11の形状および姿勢が反映された対象物モデル表現18を生成し、マニピュレータモデル表現手段21cは、マニピュレータ12の各軸の状態19に基づいてマニピュレータ12の動作状態が反映されたマニピュレータモデル表現20を生成し、三次元画像生成手段21dは、三次元空間の指定された視点から見た対象物モデル表現18およびマニピュレータモデル表現20を同一画面上に三次元的に表示させる。
(もっと読む)
ロボットによる物体を移動するサービスに必要な情報の取得方法と該方法を用いたロボットによる物体移動サービスシステム
【課題】家庭や空港ラウンジなど、任意エリアでロボットによる物体を移動するサービスに必要な情報を、確実に取得する方法とその方法を用いた物体移動サービスシステムを提供することが課題である。
【解決手段】サービス対象者からのサービス依頼内容を取得し、現在のサービスエリアに対応して依頼内容の実施に必要な確認項目をデータベースから取得して、前記確認項目に従がい、サービス依頼内容から必要情報の有無を確認した後、不足(無い)情報については情報取得に最適なデバイスを選択し、そのデバイスでサービス実施に不足する情報を取得してサービスを実施するようにした。
(もっと読む)
作業支援装置および方法
【課題】作業者の負担軽減、非熟練作業者のスキルアップ、作業の効率化などを図る。
【解決手段】モニタ画面上にワーク(作業対象物)1の実画像を表示する。このワーク1の実画像に対して、姿勢の修正方向を示す矢印Y1、目標位置への移動方向を示す矢印Y2を表示する。また、矢印Y1の長さで修正量を示し、矢印Y2の長さで移動量を示す。ロボットを遠隔操作して、矢印Y1が示す方向へワーク1を回転させると、矢印Y1が徐々に短くなり、やがて消失する。ロボットを遠隔操作して、矢印Y2が示す方向へワーク1を移動させると、矢印Y2が徐々に短くなり、やがて消失する。
(もっと読む)
作業支援装置および方法
【課題】作業者の負担軽減、非熟練作業者のスキルアップ、作業の効率化を図る。
【解決手段】モニタ画面上にワーク(作業対象物)1の実画像を表示する(図1(a))。この表示例において、ワーク1は、そのZ軸回りの回転だけが許可される。また、ワーク1の実画像に対して、ワーク1の現在の拘束状態を示す指標としてガイドラインL1と支点PMが表示される。作業者は、このモニタ画面を見ながら、ロボットを遠隔操作し、ワーク1を支点PMを中心として、ガイドラインL1の位置まで回転させる。すると、ガイドラインL1と支点PMが消え、2本のガイドラインL2が表示される(図1(c))。この表示例において、ワーク1は、ガイドラインL2に沿う方向への動きだけが許可される。作業者は、このガイドラインL2に沿って、ワーク1を目標位置へ移動させる。
(もっと読む)
点検ロボット
【課題】建造物の床下や天井裏等の閉空間において、短時間で点検漏れのない効率の良い点検を実現可能な点検ロボットを提供する。
【解決手段】任意の閉空間を点検するための点検ロボットであって、閉空間内の走行面上を移動するための移動機構120と、撮像時におけるズーム倍率が可変であり、閉空間内の被写体を撮像する回動可能な撮像ユニット13と、撮像ユニットを用いて、被写体を低倍率ズームで自動撮像する第1点検制御部102と、低倍率ズームで自動撮像された被写体の一部又は全部の範囲を、撮像ユニット13を用いて、高倍率ズームで自動撮像する第2点検制御部103とを備え、第1及び第2点検制御部102,103は、移動機構120又は撮像ユニット13の少なくとも一方を制御することで、被写体における撮像位置を順次シフトする。
(もっと読む)
自律移動装置
【課題】特定の人のそばについて自律的に移動する自律移動装置において、特定の人から見て死角となる領域に関する情報を報知することが可能な自律移動装置を提供する。
【解決手段】自律移動装置C1は、主人B1のそばについて自律的に移動しつつ、カメラ10および通信機12により主人B1の視野が総合的に認識されて視覚情報が取得される。そして、この視覚情報に基づいて死角領域VF1が死角領域検出部22により検出される。そして、検出された死角領域VF1に関する死角情報が、プロジェクタ42などにより歩道SW1上の地面に対して投影されて主人B1に報知される。この結果、主人B1から見て死角となる領域VF1に関する情報を、この主人B1に対して報知することが可能となる。
(もっと読む)
受音装置と音声認識装置とそれらを搭載している可動体
【課題】 受音装置で受音した音源の存在方向を周囲に知らせる表示器を備えた受音装置を提供する。
【解決手段】 高い指向性を持つ方向(受音方向)を調整可能なマイク20と、マイク20で受音した音源が存在する方向を検出する音源方向検出部101と、検出した音源の存在方向とマイク20の受音方向を、ロボット1の周囲から視認可能に表示する表示器10を備えている。周囲にいる人間が、受音装置で受音している音源がいずれであるのかを理解することができる。
(もっと読む)
ロボットシミュレーション装置
【課題】ロボットとワーク等との干渉の予測を行うと共に所要時間を正確に求める。
【解決手段】ロボットプログラムの作成および実行が可能なロボットシミュレーション装置(10)が、仮想空間(60)を作成する仮想空間作成手段(31)と、仮想空間内に定義されたワーク収容手段モデル(24)内に、一つ以上のワークモデル(40)を適当な姿勢で適当な位置に自動的に配置するワークモデル配置手段(32)と、仮想空間において指定された場所からみた視野範囲内に存在するワークモデルの仮想的な画像(52)を取得する仮想カメラ手段(33)と、取得された仮想的な画像に基づいてロボットのプログラムにおける教示点を補正する補正手段(34)と、補正されたプログラムに基づいて、ロボットがワークをハンドリングする動作をシミュレーションするシミュレーション手段(35)と、を含んでいる。
(もっと読む)
自律移動型ロボット
【課題】特定人物に随伴して移動する際、その移動地点付近に関連した適切な画像情報を適宜の投射面に投射して表示することができる自律移動型ロボットを提供する。
【解決手段】モビルロボットが特定人物に随伴して移動する際、画像情報記憶部5Fに記憶されている画像情報からモビルロボットの現在位置に対応した画像情報を画像情報選択部5Gが選択し、その画像情報をプロジェクタ8が投射可能な投射面を投射面決定部5Hが決定する。そして、投射面に向けてプロジェクタ8から画像情報を投射可能な投射位置を投射位置算出部5Jが算出し、ホイールインモータ制御部5Eがホイールインモータ1A,1Bを制御してモビルロボットを投射位置に向けて移動させる。その後、モビルロボットの移動地点に関連した広告や警告などの適切な画像情報をプロジェクタ8が特定人物の頭部や背中などの投射面に投射して表示する。
(もっと読む)
飛翔ロボット操縦装置および飛翔ロボット操縦方法
【課題】本発明が解決しようとする課題は、人間が直接見て操縦することができない場所で用いる飛翔ロボットが周囲の物体に衝突したり、接触したりするのを防ぎ、操縦者が飛翔ロボットの向いている方向を確認しながら操縦できるようにすることである。
【解決手段】
物体近接検知センサおよび/または方位検出センサを飛翔ロボットに取り付け、該物体近接検知センサおよび/または方位検出センサの検出する情報を、該飛翔ロボットの周囲を観察するカメラの画像情報に加えて操縦者側に送り、モニタ画面内に表示する。
(もっと読む)
身まねロボットシステムとその身まね動作制御方法
【課題】 人間の運動情報と感覚情報の両方を「身まね」することができ、変化する対象物(人や物)に対応してその運動を高い頻度で再現することができ、これにより変化する対象物と接するような仕事を行なわせることができる身まねロボットシステムとその身まね動作制御方法を提供する。
【解決手段】 人2がロボット10に没入する形でロボットを操作して対象物に対応して所望の動作を行わせ、該動作中の運動情報と感覚情報を取得する教示ステップと、教示ステップで得られた運動情報と感覚情報を基に、ロボット10に所望の動作を身まねさせる身まねステップとからなり、身まねステップにおいて、対象物1の変化に対応して、教示ステップで取得した運動軌跡を身まね中の感覚情報を使って空間的に変更しかつ時間的に伸縮させる。
(もっと読む)
自律移動型ロボット
【課題】自律移動型ロボットおよび内蔵されたカメラの姿勢を意識することなく、前記カメラの撮影画像から監視対象物を選択することで、自動的に該ロボットと該カメラの動作を可能にする遠隔監視システムを提供することにある。
【解決手段】カメラを内蔵した自律移動型ロボットにおいて、画像撮影時の自律移動型ロボットの方向、内蔵カメラの方向および画角を記憶しておき、前記撮影画像の中から監視対象物の映っている位置を指定することで、自動的に前記自律移動型ロボットおよびカメラの移動制御を行ない、前記カメラの画面中央に前記監視対象物が映るようにする。
(もっと読む)
移動式ロボット
【課題】 複数の動作指示部から視認に適したものを選択して、選択された動作指示部の指示に従って動作を変更する移動ロボットにおいて、動作指示部を切換える首振り動作を自然で滑らかな動作で実現することが可能な技術を提供する。
【解決手段】 視認する動作指示部を切換える際に、頭部の回転の速度の時系列を設定して、その頭部の回転の速度の時系列に基づいて頭部を回転させるアクチュエータを駆動する。アクチュエータを駆動している間も、目標とする頭部の回転角を逐次計算して、頭部の回転の速度の時系列を逐次更新する。
(もっと読む)
移動体の遠隔操作支援方法及びシステム
【課題】 遠隔操作者が移動体の走行環境に関する情報を予め知らない場合においても、移動体周囲の状況を正確に把握し、容易に遠隔操作を行なうことを可能とする。
【解決手段】 周囲の画像情報を取得する撮像装置と、障害物までの距離を検出する距離検出センサとが搭載され、遠隔操作部の遠隔操作により移動する移動体の遠隔操作を支援する方法において、前記距離検出センサにより取得した障害物情報より2次元の障害物マップ104を生成する障害物マップ生成プロセスと、前記撮像装置により取得した画像情報100に前記障害物マップから抽出した移動体の移動可能領域情報を重畳処理する重畳処理プロセスと、を備え、前記画像情報と前記重畳処理された前記移動可能領域情報とを同一の画面上に表示する。
(もっと読む)
ロボットコントロールシステム
【課題】ロボットの操作性を向上させることができるロボットコントロールシステムを提供すること。
【解決手段】ロボット1と、ロボット1に対してRAWコマンドを送信する送信機2とを有するロボットコントロールシステム100であって、ロボット1は、複数のサーボモータ5と、センサ部6と、制御部3とを備える。制御部3が、RAWコマンドを受信したとき、センサ部6の検出結果と制御部で実行されるプログラムとにより得られたロボット1の状態に応じた動作コマンドを設定し、該動作コマンドに基づいてサーボモータ5を、それぞれ駆動することによりロボット1の動作を実現する。
(もっと読む)
自律走行移動体
【課題】 走行空間内の壁際や隅についても探索走行ができ、自律走行移動体を用いて作業を行うことができるとともに、走行空間内を探索移動するために必要な検知手段や検出手段の数をできるだけ減らし、小型化することが可能な自律走行移動体を提供することである。
【解決手段】 自律走行移動体1は、移動体本体10と、移動体本体10を走行させる駆動輪12と駆動モータ14と、駆動モータ14を制御する制御部20と、移動体本体10を走行させるための走行情報が入力され、かつ、入力された走行情報に基づいて駆動モータ14を制御するための制御情報を制御部20に与える操作ユニット50とを備える。
(もっと読む)
自走式掃除機
【課題】遊び相手としての魅力のある高い付加価値を有する自走式掃除機を提供する。
【解決手段】遊戯制御手段は、音声出力手段が所定のタイミングで繰り返し発する所定の遊戯用メッセージの各回毎の終了後において、人体検知手段が移動する遊戯者を検知した場合には、音声出力手段に所定の捕獲成功メッセージを出力させ、撮像手段に同遊戯者を撮像させ、かつ同撮像にかかる画像を画像表示手段に表示させるとともに、予め設定した人数の遊戯者が検知された場合、或いは、上記遊戯用メッセージが発せられている間に本体に配設された所定の遊戯終了キーが押されたことを検知した場合に遊戯を終了させる。その結果、自走式掃除機は掃除機能に加え、自走機能を生かして所定の遊戯を行なうに際し人間の対戦相手としての遊び相手機能を発揮する。
(もっと読む)
1 - 20 / 21
[ Back to top ]