
Fターム[3C007KT17]の内容
マニピュレータ、ロボット (46,145) | 視覚装置、画像化装置 (2,194) | 画像表示 (109) | 主にマニピュレータの表示 (33)
Fターム[3C007KT17]に分類される特許
1 - 20 / 33
ロボットシステム
【課題】少ない時間で操作を習得することができる、直感的なロボットの遠隔操作インタフェースを提供する。
【解決手段】ロボットの操作装置が、カメラから取り込まれたカメラ映像が表示されるタッチスクリーンと、カメラ映像からロボットの3次元的な位置及び姿勢を認識するロボット認識部と、ロボット認識部で認識した位置及び姿勢とからロボットのCG映像を生成し、CG映像をタッチスクリーン上のロボットのカメラ映像に重畳表示するCG合成部と、ユーザのタッチ操作に応じて、タッチスクリーン上でCG映像のロボットを仮想的に動作させる操作入力部と、CG映像のロボットの仮想的な動作に追従してロボットが動作するように、ロボットに対して制御命令を送出するロボット制御部と、を有している。
(もっと読む)
遠隔操作装置

【課題】操作者が、マニピュレータの出力動作を容易に連想及び体感しながら入力動作を行うことができる遠隔操作装置を提供すること。
【解決手段】重力方向に対する姿勢及び回動動作が入力される第一入力部10と、第一入力部10に対して回転可能に接続されて、重力方向に対する姿勢及び第一入力部10に対する回転動作が入力される第二入力部11と、第一入力部10又は第二入力部11に対して移動可能に接続されて、第一入力部10又は第二入力部11に対する移動動作が入力される第三入力部12と、入力動作を第一入力部10又は第二入力部11の何れか一方に規制する入力切換スイッチ(入力切換部)13と、加速度センサ(加速度検出部)15と、入力動作を腕部に対する手先部の回動方向及び回動角度に変換し、入力動作を手先部の移動方向及び移動距離に変換し、並びに、入力動作を把持部の開閉量に変換する制御部17と、を備えている。
(もっと読む)
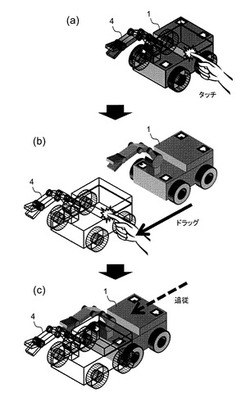
ロボットシステム
【課題】オペレータがペンダントを操作してロボット本体のマニュアル動作を実行させる際に、オペレータの主観によることなく、一意的にペンダントの向きとロボット座標系とを対応させて移動方向の指示操作を行う。
【解決手段】ロボットコントローラ3は、ペンダント4のカメラ17によりロボット本体2の撮影画像データを取込むと共に、ロボット本体2の現在の位置姿勢情報から、3Dモデルを作成する。3Dモデルを、カメラ17による撮影画像と最も類似性が高くなるまで視点移動により動かし、探し出された最も類似性の高い視点をペンダント視点とする。ロボット座標系と、ペンダント4のタッチパネル14の軸系とのズレ量を設定する。ペンダント4のタッチパネル14により指示操作される移動方向を、設定されたズレ量に応じてロボット座標系での移動方向に変換することでロボット本体2(手先)の移動方向に同期させる。
(もっと読む)
回転角度検出装置、有関節構造体および態様取込装置
【課題】回転して角度が検出される可動領域を従来と比べて大きくすること。
【解決手段】軸支持部102aと軸支持部102aに直交する方向に延びる軸受部材102b,102cとを有する枠体101と軸支持部102aに支持され且つ軸支持部102aの面に対して凸上に延びる回転軸111と軸支持部102b,102cに支持され且つ軸支持部102b,102cの面に対して凸上に延びる回転軸122と回転軸111回りの回転角度を検出する回転角度検出部材113と回転軸121回りの回転角度を検出する回転角度検出部材122と回転角度検出部材113および回転角度検出部材122に電気的に接続され且つ枠体101に支持された基板114とを備えたことを特徴とする回転角度検出装置。
(もっと読む)
ロボット操作装置
【課題】遠隔コミュニケーションが行われるシステムにおいて、簡易な設備でユーザに負担を掛けることなくロボットが自然な身体動作を行うようにすることができるようにする。
【解決手段】ロボット操作装置は、ロボット20が存在する空間を撮像した映像を入力する映像入力部11と、映像入力部11が入力した映像を、ロボット20の頭部等の部位21の志向に対応する画像の部分から遠くなるほど解像度を下げるように加工する映像加工部12と、映像加工部12が加工した映像を表示器15に表示する映像表示部13と、表示器15に表示された映像におけるユーザが指定した位置を向くように部位21を移動させる命令を発行する映像位置指定部14とを備えている。
(もっと読む)
教示装置及び教示方法
【課題】ロボットの教示を実際の目視によって行い難いような場合であっても教示作業を確実に行うことができる教示装置及び教示方法を提供する。
【解決手段】ワークと関連する動作位置をロボットへ教示する教示装置1において、ロボット300に設置された力検出部310が検知するワーク把持部の受ける3次元の力情報を入力する力情報入力手段140と、ロボットの作業領域を撮影するカメラ130からの画像データを取得する画像情報入力手段152と、ロボット教示用の操作指令入力信号を入力する操作指令入力手段122を備えると共に、力情報と、画像データと、操作指令入力信号に基づき、教示の際にワークを実際に撮像した画像及びワーク把持部に作用する3次元の力情報を同時に表示する画像表示手段を備えている。
(もっと読む)
スマートカメラ及びロボットビジョンシステム
【課題】ロボットの各種制御等に際し、ネットワークを介してのより自由度の高い、しかもより効率のよいデータ授受を可能とするスマートカメラ、及び該スマートカメラを備えるロボットビジョンシステムを提供する。
【解決手段】スマートカメラは、第1コマンドインタフェースCIF1(以下、CIF1)と第2コマンドインタフェースCIF2(以下、CIF2)とを有する。画像処理プロセスDPはCIF1から入力される指令に基づいて撮像データDT1を画像処理し、ロボットの制御に有益な情報からなる結果データDT3を生成してこれを結果データバッファDB3に保存し、またCIF1に出力可能にする。一方、イメージセレクタSWはCIF2から入力される指令に基づいて撮像データDT1または処理画像データDT2のいずれかをモニタ画像データとして選択してこれをCIF2から出力する。
(もっと読む)
マニピュレータ、マニピュレータの駆動方法、マニピュレータシステム及び微小操作対象物の操作方法
【課題】容易な位置決めとインジェクションとを同時に満たすことができるマニピュレータを提供する。
【解決手段】このマニピュレータ1は、操作試料に対してインジェクションを行なうものであって、XYZ軸方向に駆動可能であり、少なくともインジェクションを行なう軸方向の圧電素子6を駆動源とするナノポジショナ7と、圧電素子に対して信号を印加することにより圧電素子を微動動作させる制御部10aと、を有する。
(もっと読む)
ロボットシミュレータ
【課題】ロボットの作業部位へのアプローチやワークからの離脱の際のロボットやツールの軌跡をも考慮した治具の設計が行え、さらにはティーチングデータの修正も可能で、ロボットによる作業を総合的な視点から最適化することができるロボットシミュレータを提供する。
【解決手段】オペレータからの入力を受け付ける入力装置2と、入力装置2からの入力に応じて多関節ロボットの動作をシミュレートする処理装置4と、処理装置4による処理結果を3次元グラフィックによって表示する表示装置3とを備えるロボットシミュレータにおいて、処理装置4は、多関節ロボットの動作を表示装置3上においてティーチングするオフラインティーチング手段8と、多関節ロボットの作業対象となるワークを支持または固定する治具を設計する3次元CAD手段9とを備える。
(もっと読む)
ロボットによるパレタイジング作業のためのロボットプログラミング装置
【課題】パレタイジング作業のプログラムの作成に必要な実機ロボットの操作を削減し、パレタイジングプログラムの作成に要する時間を短縮することを可能にしたロボットプログラミング装置を提供する。
【解決手段】ロボットプログラミング装置は、複数種類の荷物、コンベア、判別装置、ロボット及び複数のパレットの3次元モデルを記憶する記憶部と、記憶部に記憶された3次元モデルのレイアウトを仮想空間内で作成するレイアウト作成部と、レイアウトを画面表示する表示部と、表示部に表示された各機器に関する情報を設定する情報設定部と、3次元モデルのレイアウト、及び情報設定部に設定された情報に基づいてロボットのパレタイジングプログラムを生成するプログラム生成部と、を有する。
(もっと読む)
磁気プローブ、同磁気プローブの製造方法および同磁気プローブを備える微粒子配置装置
【課題】極めて小さい微粒子を単体で安定して保持することができるとともに、同保持した微粒子を極めて小さい間隔で配置することが可能な磁気プローブを提供する。
【解決手段】磁気プローブ10は、先端部12が尖った円筒状のプローブ本体11を備えている。プローブ本体11の内周面には鉄による被膜Ciが形成されており、先端部12における被膜Ciは磁性部13を構成する。プローブ本体11の外周面にはパーマロイによる被膜Coが形成されており、先端部12における被膜Coは磁性部14を構成する。磁性部13と磁性部14とは鉄柱15およびワイヤ16を介して磁気的に接続されている。鉄柱15の外周面にはコイル23が配置されている。コイル23に通電させると、磁性部13から磁性部14に向けて磁力線が生じ磁気プローブ10の先端部12に局所的な磁界が形成されて微粒子Pを保持することができる。
(もっと読む)
遠隔操作支援装置および遠隔操作支援プログラム
【課題】対象物の位置や姿勢が事前に判らない場合においても、任意の方向から対象物を確認することを可能としつつ、対象物の遠隔操作を支援できるようにする。
【解決手段】環境データ取得手段21aは、レーザスキャナ13にて計測された対象物11上の点群データを環境データ15として取得し、対象物モデル表現手段21bは、対象物11についての環境データ15に基づいて三次元認識処理17を行うことにより、対象物11の形状および姿勢が反映された対象物モデル表現18を生成し、ロボットモデル表現手段21cは、ロボット12の各軸の状態19に基づいてロボット12の動作状態が反映されたロボットモデル表現20を生成し、三次元画像生成手段21dは、三次元空間の指定された視点から見た対象物モデル表現18およびロボットモデル表現20を同一画面上に三次元的に表示させる。
(もっと読む)
マスタ・スレーブ式マニピュレータシステム
【課題】マスタ・スレーブ式マニピュレータシステムにおいて、モニタや操作入力装置の配置に制限がない簡単な構成で、直感的な操作を可能とすること。
【解決手段】マスタ・スレーブ式マニピュレータシステム1は、マニピュレータ134、カメラ146、モニタ152、操作入力装置100、マニピュレータコントローラ122、マスタコントローラ104を備える。マスタコントローラ122は、操作入力装置100による指示に基づいて操作指令情報を取得する操作指令情報取得部106と、操作指令情報を位置移動指令情報と姿勢指令情報とに分離する取得情報分離部110と、姿勢指令情報に基づいて位置移動指令情報を補正して位置移動指令補償情報を出力する移動方向補償コントローラ116とを備える。マニピュレータコントローラ122は位置移動指令補償情報及び姿勢指令情報に基づいてマニピュレータ134の位置姿勢を制御する。
(もっと読む)
制御シミュレーションシステム
【課題】制御用ソフトウェアの開発において、実機を用いた検証の手間を軽減することを可能とする制御シミュレーションシステムを提供する。
【解決手段】制御シミュレーションシステムは、制御指令に基づいて機器を制御するために機器インターフェイスを介して送信される電気信号を機器インターフェイスの種類に応じて生成する制御部と、入力インターフェイスを介して入力した入力電気信号を制御指令に変換する中間プログラムを入力インターフェイスの種類に応じて複数記憶する中間プログラム記憶部と、制御部から受信した電気信号を、複数の中間プログラムのうちのいずれかを用いて制御指令に変換して得られた入力制御指令に基づいて、機器の動作をシミュレートする動画を作成して表示するアニメーション部とを備える。
(もっと読む)
テレオペレータシステムとテレプレゼンス法
【課題】改善された遠隔操作を行なえるロボットシステム、手術装置等を提供する。
【解決手段】マスターマニプレータと;スレーブマニプレータと;モータ装置と;を備え、スレーブマニプレータは、基部側の端部と末端側の端部とを有する細長いシャフトを備え、シャフトは基部側の端部と末端側の端部との間に位置する基準点を有し、スレーブマニプレータはシャフトの末端側の端部に連結されたエンドエフェクターを更に備え;モータ装置はシャフトの基部側の端部に連結され、モータ装置はシャフトの基部側の端部を少なくとも2つの自由度にて運動させることによってマスターマニプレータの運動をシャフトの末端側の端部の対応する運動に変換するよう構成され、少なくとも2つの自由度の前記運動は、シャフトの基部側の端部の運動中に基準点が空間内で固定されるように調整されることを特徴とするロボットシステム。
(もっと読む)
脚式歩行型移動体及び脚式歩行型移動体制御システム
【課題】操縦者の操縦性を向上させ、移動平面上の将来的な脚部の接地位置を容易に選択可能にする脚式歩行型移動体、および脚式歩行型移動体制御システムを提供すること。
【解決手段】操縦者が脚部の接地位置を変更するように操縦することで、平面上を移動制御可能な脚式歩行型移動体において、操縦者を搭乗する搭乗部と、脚部が接地する接地位置を含む、平面上における脚部近傍の領域を撮像する撮像部と、撮像部によって撮像された領域の像を表示する表示部と、を備え、表示された領域の像に併せて、操縦者の操縦により変更される脚部の将来的な接地位置を示す仮想的接地位置を、前記表示部に表示する。
(もっと読む)
手術支援ロボットの動作制御システム及び位置検出装置
【課題】 マニピュレータの体内側に存在する部分にセンサや光検出器を設置しなくても、当該部分の実際位置を正確に把握すること。
【解決手段】 マーカA〜Cが設けられたマニピュレータ23と、当該マニピュレータ23を保持するロボットアーム24と、このロボットアーム24を動作させる駆動装置25と、マーカA〜Cを撮像可能な内視鏡11と、ロボットアーム24に対する動作を指令する操作装置13と、当該操作装置13からの指令に基づいて駆動装置25の駆動を制御する制御装置14とを備えて動作制御システム10が構成されている。制御装置14は、内視鏡11で撮像されたマーカA〜Cの画像に基づいて、当該マーカ部分の実際位置を求め、操作装置13からの指令による前記マーカ部分の目標位置が前記実際位置と相違している場合、前記マーカ部分を前記目標位置に近づけるように補正制御を行う。
(もっと読む)
ロボット言語処理装置
【課題】ロボット言語の表示・編集を行う際に教示装置やプログラミングペンダントに表示されるのは、従来、ロボット言語の中間コードをキャラクタ表現に変換したものだけであり、ロボットの動作を直感的に把握することができず、言語の習得に時間を要し、教示後にロボットを実際に動かして作成したプログラムの正当性を確認する必要があった。
【解決手段】グラフィカル表示が可能でありポインティングデバイスによってその表示画面中の位置を指定できる表示装置と、ロボットプログラムを格納するメモリと、ロボットプログラムを参照して、作業区間及びエアーカット区間を連続した線として表示装置に表示し、ポインティングデバイスにより表示画面に表示中のいずれかの線が指定されたときには、その線における作業内容の種類を表示画面に表示するグラフィカル言語処理部とを設け、グラフィカル・ユーザ・インタフェースに基づく教示を可能にする。
(もっと読む)
ロボットのオフライン教示装置
【課題】 ワーク追従動作を含むロボット動作をオフラインで教示する際に、ロボット動作の安全を担保する空間的範囲をモデル表示画面上で確認できるようにする。
【解決手段】 オフライン教示装置10は、搬送路モデルCM、ワークモデルWM及びロボットモデルRMの画像を生成するモデル画像生成部12と、搬送路上の基準点となる基準点指標BI、並びにロボット動作の安全性を担保する空間的範囲を規定する上流端指標UI及び下流端指標DIを生成する指標生成部14と、搬送路モデル、ワークモデル、ロボットモデル、基準点指標、上流端指標及び下流端指標を、実際のロボット作業環境に対応する相対配置で表示する表示部16と、ワークモデルにワーク移動動作を遂行させる搬送シミュレート部18と、ワークモデルが上流端指標から下流端指標まで移動する間、ロボットモデルにロボット動作を遂行させるロボット動作シミュレート部20とを備える。
(もっと読む)
ロボットの運動制御装置
【課題】 高速で精度よく制御処理を行うことを可能としたロボットの運動制御装置を提供する。
【解決手段】 関節角度θから順運動学演算部251が実位置・姿勢情報ξを求め、フィードバック制御を行う第1のフィードバック制御系25のフィードバックループの外側に、画像認識部20の認識結果を基にしてビジュアルフィードバックを行う第2のフィードバック制御系のフィードバックループが存在する2重フィードバックループを構成している。画像認識部20の認識結果から第1の運動推定部261により現在のハンドの位置・姿勢等を推定してビジュアルフィードバックの制御の遅れを補償する。
(もっと読む)
1 - 20 / 33
[ Back to top ]