
Fターム[3C007LU03]の内容
マニピュレータ、ロボット (46,145) | 速度、力、ハイブリッド制御 (451) | 速度制御 (170) | 加速、減速の制御 (25)
Fターム[3C007LU03]に分類される特許
1 - 20 / 25
ロボット駆動方法及びロボット
【課題】回生エネルギーの発生自体を抑制しつつ、外力やロボットの状態変化に対して強い動作を行なわせることができる駆動方法を提供する。
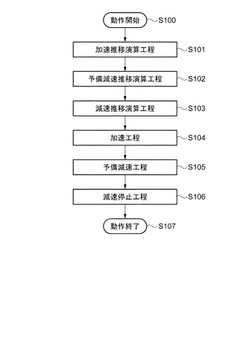
【解決手段】目標位置に向かって可動部を移動させる際に、駆動力を動力発生部に発生させることにより、可動部を目標位置に向けて加速を行なわせる加速工程のステップS104と、一定速にするよりも動力発生部における発生力の小さい制御を行なう予備減速工程のステップS105と、目標位置に向かう方向とは逆方向の駆動力を発生させて可動部を減速させ目標位置に停止させる減速停止工程のステップS106を行なわせる。この際に予備減速工程のステップS105の一部において予備減速推移演算工程S102で演算した指令速度を基にした速度制御を行なう。
(もっと読む)
ロボット、ロボットの駆動方法

【課題】回生エネルギーの発生を抑制してロボットの全体としての生産性を向上させる。
【解決手段】ロボットの可動部を目標位置に向けて加速し、目標位置の手前で制動力を作
用させて可動部を減速させることで目標位置に停止させる。更に、可動部に制動力を作用
させるに先立って、停止時の制動力よりは小さな制動力を作用させることにより、可動部
を緩慢に減速させる予備減速を行う。こうすれば、可動部の移動速度が低下した状態から
停止させることができるので、停止時に発生する回生エネルギーを抑制することができる
。その結果、ロボット全体としてのエネルギー効率が改善されるので生産性を向上させる
ことが可能となる。
(もっと読む)
力制御装置
【課題】力制限を超過した際にロボットを停止処理する場合においても、作用力が許容値以下となる制約を満たす範囲で、動作時間の短縮化、立上げ調整時間の短縮化を図る。
【解決手段】対象物に対するロボットの目標位置指令を生成する指令生成手段(10)と、目標位置指令に応じて追従制御を行うロボット制御手段(20)と、対象物からロボットへ働く作用力が所定の力制限値を超過した場合に停止指令を生成する力制限超過判別手段(30)と、ロボットを減速停止させる場合を考慮して、対象物の特性および所定の力制限値に基づいて、減速停止中において作用力が所定の許容値以下になる制約を満たす範囲で動作速度を最大にする最適速度を算出する速度最適化手段(40)とを備え、指令生成手段(10)は、最適速度に応じた目標位置指令を生成し、停止指令を受信した場合には、ロボットを減速停止させる指令を生成する。
(もっと読む)
多関節型ロボットの速度指令プロファイルの生成方法
【課題】カットオフ周波数の高いローパスフィルタを適用したときに停止振動を低減するためには、カットオフ周波数の低いローパスフィルタを適用したときと同等の減速時間を持たせられるような加減速特性を実現し、停止振動が発生し難い長い減速時間を持った速度指令プロファイルを生成する必要がある。
【解決手段】プログラムで指定された動作速度によらず加速度が常に一定となる手法により生成した速度指令プロファイルにカットオフ周波数の低いローパスフィルタを適用したときの減速時間と、前記速度指令プロファイルに前記ローパスフィルタよりもカットオフ周波数が高いローパスフィルタを適用したときの減速時間とが、同等になるようにして求められた加減速特性を用いて生成した速度指令プロファイルに、前記カットオフ周波数の高いローパスフィルタを適用したときの速度指令プロファイルを求める。
(もっと読む)
ロボット装置およびロボット装置の制御方法
【課題】角速度および加速度センサーを用いて、アームの移動ベクトルに対応して角速度もしくは加速度センサーのどちらかの検出値を選択し、生成された制御信号によりアームの移動停止時に発生する振動を短時間に収束させ、アームの速い作動速度と高い停止位置精度を有するロボット装置とその制御方法を提供する。
【解決手段】ロボット装置であって、アームに角速度センサーと加速度センサーとを備え、前記角速度センサーと前記加速度センサーとが配置された部位が、直線運動もしくは曲線運動であるかを判定する動作判定部と、前記動作判定部の結果に基づき前記角速度もしくは加速度センサーの検出値から前記アームの制御信号を生成する制御信号生成部と、前記制御信号に基づき基体連結装置とアーム連結装置とを制御する制御部とを備える。
(もっと読む)
ロボット制御装置
【課題】ロボットの動作停止時に振動が発生することを適切に回避し、ロボットの動作開始から動作停止までの動作全体での動作軌跡の精度を適切に高める。
【解決手段】ロボット制御装置3は、ロボット2の動作停止時では摩擦補償をオフすることなく更新を停止し、ロボット2の動作再開時では、ロボット2の動作再開時の摩擦補償の状態量とロボット2の動作再開直前の摩擦補償の状態量との差分を補正量として計算し、ロボット2の動作再開時の積分補償の状態量をロボット2の動作開始直前の積分補償の状態量から補正量を差引くことで計算する。
(もっと読む)
パラレルメカニズム
【課題】 エンドエフェクタを目標位置まで移動させつつ目標回転角度位置まで回転する際に、回転時間を増大させることなく、エンドエフェクタが目標位置に到達したときの該エンドエフェクタの回転角度位置精度を向上させることが可能なパラレルメカニズムを提供する。
【解決手段】 パラレルメカニズム1は、ベース部2に取り付けられた電動モータ21の出力軸に一端が接続され、他端がエンドエフェクタ13に接続され、電動モータ21の回転駆動力をエンドエフェクタ13に伝達する旋回軸25と、電動モータ21を制御する電子制御装置30とを備える。電子制御装置30は、停止状態のエンドエフェクタ13を目標回転角度位置まで回転する際に、エンドエフェクタ13を回転加速する際の角加速度の絶対値が、回転減速する際の角加速度の絶対値よりも大きくなるように、かつ、加速時間t1が減速時間t2よりも短くなるように電動モータ21を制御する。
(もっと読む)
移動体の移動装置および電子部品実装装置ならびに移動体の位置決め制御方法
【課題】直交ロボットの停止特性を考慮して移動体の移動経路を設定する移動体の移動装置および電子部品実装装置ならびに移動体の位置決め制御方法を提供する。
【解決手段】出発点Oから実装点Aに移動する場合、ノズルは出発点Oと実装点Aを直線で結ぶ破線L1で示した最短の経路ではなく、中継点Dを経由する実線L2、L3で示す経路を選択する。実装点Aから次の実装点Bに移動するときは、実装点Bに対し、実装点Aに対する中継点Dと同じ位置関係となる中継点Eを経由する。さらに実装点Bから次の実装点Cに移動するときも、同様に中継点Fを経由する。実装点A、B、Cと中継点D、E、Fを結ぶ経路L3、L6、L7は全て同方向、同距離であり、ノズルはこれらの経路を同じ加速度で移動する。これにより直交ロボットの停止特性が全ての実装点において同じ条件となり、相対的な位置決め精度が向上する。
(もっと読む)
パラレルメカニズム
【課題】 目標位置に到達するまでに要する時間を増大させることなく、目標位置に到達したときのエンドエフェクタの位置精度を向上させることが可能なパラレルメカニズムを提供する。
【解決手段】 パラレルメカニズム1は、ベース部2に取り付けられた3つの電動モータ4と、エンドエフェクタ13が取り付けられるブラケット14とが3つのアーム本体6によって並列に連結されて構成されている。電動モータ4を制御する電子制御装置30は、停止状態のエンドエフェクタ13をA点から目標位置(F点)まで動かす際に、エンドエフェクタ13を加速する際の加速度が、減速する際の減速度よりも大きくなるように、かつ、加速時間t1が減速時間t3よりも短くなるように電動モータ4を制御する。
(もっと読む)
保持手段駆動装置、その制御方法、及び制御プログラム
【課題】電子部品保持手段を介して電子部品に加える荷重を検出するに際し、荷重センサを使用することにより、リアルタイムで当該荷重を検出することが可能な電子部品保持手段の保持手段駆動装置、その制御方法及び制御プログラムを提供する。
【解決手段】駆動ユニット15は、サーボモータによる送り用の駆動源を備え、この送り用の駆動源のサーボモータの駆動力により操作ロッド15aが電子部品のZ軸方向である上下方向に動作する。この操作ロッド15aには、下端部に荷重センサ15eが装着される。この荷重センサ15eは、サーボモータを通じた操作ロッド15aの下方移動により吸着ノズル11と接触することで当該ノズル11を押し下げる際に操作ロッド15aに加わる荷重、すなわち工程処理部2aに位置決めされる電子部品3に加わる荷重を直接検出する。
(もっと読む)
ロボットシステムの制御装置、制御方法およびそのプログラム
【課題】マニピュレータを動作範囲内に停止させる制御に要する計算量を低減する。
【解決手段】制御装置3は、マニピュレータに指令すべき溶接トーチ先端の次回位置を速度パターンと現在時刻とに基づいて算出する次回位置算出手段33と、溶接トーチが最大動作速度で動作しているときに所定の減速度内で停止可能な時間を示す最大減速時間を算出する最大減速時間算出手段40と、現時点から少なくとも最大減速時間だけ経過した時刻において指令すべき溶接トーチ先端の未来位置を算出する未来位置算出手段50と、動作中に溶接トーチ先端の未来位置が動作限界を越えたか否かを判別する動作限界判別手段60と、越えた場合に現時点から溶接トーチを減速停止させる指令を生成する停止制御手段34と、越えていない場合に溶接トーチを次回位置まで動作させる指令を生成するマニピュレータ制御手段70とを備える。
(もっと読む)
モーションコントローラおよびモーションプランナおよび多軸サーボシステムおよびサーボアンプ
【課題】多軸のモーションコントローラにおいて、最短時間制御を可能とするようなコマンドを持たせる。
【解決手段】PTP制御において、従来は各点の座標の値のみを指定するようにしていたが、各点の座標に加えて、その点を通過する速度の目標値も指定することにより、速度も考慮した移動の軌跡を指定することができ、予め計算しておいた最短時間移動を実現する軌道をモーションコントローラに指令することにより最短時間制御を実現する。また、少ないポイント数で軌道を指定できるので、最短時間を実現する軌道の容易な計算を可能にする。
(もっと読む)
ロボットアーム、及びその制御方法
【課題】目標位置までの駆動時間を短縮することができるロボットアーム、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかるロボットアームは、複数の関節を駆動して、手先を目標位置まで移動させるロボットアームであって、手先軌道を生成する手先軌道生成部と、手先軌道にしたがって移動するときの手先速度を演算する手先速度演算部33と、手先速度に基づいて、関節の駆動速度を算出する駆動速度算出部34と、関節の駆動速度が駆動速度の限界値を越えているか否かを評価する駆動速度評価部35と、駆動速度が限界値を越えている場合に、手先速度を修正する手先速度修正部と、修正された手先速度に基づいて算出された駆動速度に応じて、関節を駆動するアクチュエータ28と、を備えるものである。
(もっと読む)
移動ロボット
【課題】移動ロボット本体の移動する速度に過剰な制限を設けることのない移動ロボットを提供すること。
【解決手段】移動ロボット本体と、移動ロボット本体に対して相対的に姿勢変形可能な姿勢変形部材とを備える移動ロボットにおいて、障害物を検知した際、移動ロボット本体の方向及び速度と姿勢変形部材の先端部の位置情報とに基づいて、移動ロボット本体の移動速度及び移動方向を定める第1速度ベクトルと、該先端部の移動ロボット本体に対する相対的な移動速度及び移動方向を定める第2速度ベクトルとを算出し、制御部が、移動ロボット本体が障害物に向かう方向の速度成分を求め、移動ロボット本体が第1速度ベクトルを算出した際の速度で移動を継続し続けた場合に障害物に到達する時間よりも、姿勢変形部材の先端部の障害物に対する相対的な移動速度がゼロになるまでに要する時間を大きくするように移動手段と駆動部とを制御する。
(もっと読む)
基板搬送装置
【課題】 基板吸着エラーを未然に回避できる信頼性の高い基板搬送装置を提供する。
【解決手段】 基板吸着部の真空圧を検出し、検出された圧力データの演算処理を行うことにより、次に処理する基板の吸着部真空圧の変化を予測する手段及び、基板保持状態を判別する手段及び、吸着部真空圧の圧力値に応じた加速度変更手段及び、基板吸着面のクリーニング手段を備える。これにより、基板吸着面に付着する異物による吸着部真空圧の上昇によって起こる搬送装置の吸着エラーに対して、未然に吸着エラーを予測し警告信号を出力する。吸着エラーが発生する前に吸着面のクリーニングを効率よく実行することで装置の生産性を低下させない。また、突発的な吸着エラーに対しては基板保持状態を判別し、吸着圧力に応じて搬送加速度を変更することで安全に基板搬送を続行可能とする。
(もっと読む)
搬送ロボット及び搬送プログラム
【課題】コップなどの容器に液体が入っていることを自動で検出し、容器を水平状態に維持する制御を行って搬送する搬送ロボットを提供する。
【解決手段】搬送する容器8の傾きを調節する傾動手段16と、容器8を搬送する際に要求される搬送姿勢情報を取得する搬送姿勢情報取得手段50と、搬送姿勢情報に水平状態を維持する旨の情報が含まれている場合には傾動手段16に対して容器を水平状態に維持する制御指令を出力する姿勢制御手段82と、容器8の内容物7が流動物であると検知した場合には容器8を水平状態に維持する旨の搬送姿勢情報を生成する流動物検知手段80と、傾動手段16が持ち上げた容器を搬送する搬送手段14とを備えた。
(もっと読む)
自律移動ロボットおよび自律移動ロボットによる物品運搬方法
【課題】自立移動ロボットが物品を取得元から主体的に受け取り、制振制御により揺れを押さえて運び、届け先に確実に届けることを可能とする。
【解決手段】物品の運搬には所定の仕様の運搬容器(M)を用いる。運搬容器には、画像識別のためのパタン(M2)および把持に適した形状の把持部分(M3)を備える。ロボット(R)は、取得元の画像から、運搬すべき物品を載せた所定仕様の運搬容器の把持に適した所定位置を認識する把持位置認識手段261と、把持部を運搬容器の所定位置に駆動し、所定位置を把持する制御を行う把持制御手段262と、把持部に作用する外力に基づいて把持に成功したか否かを判断する把持成否判定手段245とを備える。さらに、運搬中に、把持部に作用する外力を打ち消す帰還制御を行うことにより把持部の振動を押さえる制振制御手段410を備える。
(もっと読む)
強化された手動制御によるCMMアーム
本発明は、外郭が設けられた強固CMMアーム用装置に関し、内部CMMアームと、内部CMMアームを、1つ以上の内部ボリュームが、固体対象物および流体の進入に対してシールされるように、複数の伝達手段を介して駆動する外郭を備える。本発明はまた、RCAの触覚制御にも関する。 (もっと読む)
倒立振り子型台車ロボットとその制御方法
【課題】走行開始時のタイムラグが小さく,停止時のオーバーシュートが小さく,外乱時の許容値が大きいとともに戻し時間が短い倒立振り子型台車ロボットとその制御方法を提供すること。
【解決手段】本発明の倒立振り子型台車ロボット1は,倒立振り子型台車と,倒立振り子型台車の車輪2,3を駆動する駆動モータ21,22と,倒立振り子型台車の前後方向に移動可能な右腕部14および左腕部15と,駆動モータ21,22により倒立振り子型台車の移動速度を増加させる際に,両腕部14,15を倒立振り子型台車の進行方向前向きに移動させる制御コンピュータ25とを有する。また,制御コンピュータ25は,駆動モータ21,22により倒立振り子型台車の移動速度を減少させる際には,両腕部14,15を倒立振り子型台車の進行方向後向きに移動させる。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】 手作業によるタイミング調整が不要で、各ロボットの動作を同時に行わせることができるロボット制御装置およびロボット制御方法を提供する。
【解決手段】 コントローラ23は、移動開始位置から同期動作位置まで、各ロボットハンド19をそれぞれ最短時間で移動させるときの第1移動時間をロボット毎に計算し、計算した各第1移動時間のうちで、最も長くなる第2移動時間を決定する。そして決定した第2移動時間で、各ロボットハンド19を移動開始位置から同期動作位置まで停止させずに移動させるロボット動作計画をロボット毎に生成する。これによって各ロボットのロボットハンドが、移動開始位置から同期動作位置まで、それぞれ停止することなく移動し、同時に同期動作位置に到達する。したがって手作業によるタイミング調整を不要として、コントローラ23が、同期動作位置に移動した状態で、各ロボットの動作を同時に行わせることができる。
(もっと読む)
1 - 20 / 25
[ Back to top ]