
Fターム[3C007LV02]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | 協調制御 (273) | マニピュレータ同士の協調 (187)
Fターム[3C007LV02]に分類される特許
1 - 20 / 187
ロボットシステム
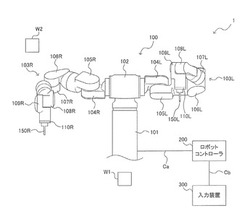
【課題】対象物を固定しつつ旋回が必要となる作業を1台のロボットで行うことができるようにする。
【解決手段】ロボットシステム1は、ロボット100と、このロボット100の動作を制御するロボットコントローラ200とを備えている。ロボット100は、先端にツール150L,150Rを備えた2つのアーム103L,103Rと、これら2つのアーム103L,103Rを支持し、旋回させる胴体部120とを有している。ロボットコントローラ200は、2つのアーム103L,103Rのうち、少なくとも1つのアーム103の先端に備えられたツール150が旋回の前後を通じて同一の位置及び姿勢に保持されるように、ロボット100を制御する。
(もっと読む)
ロボット制御装置及びロボット制御方法

【課題】主電源が停電した後に復旧した際に、簡便な制御で、ロボット本体が迅速に作業を再開できるようにする。
【解決手段】演算器は、ロボット本体の一連の作業を予め複数の作業区分に分割し、主電源の電力供給によって、順次、ロボット本体に作業区分毎に作業を実行させる(S21〜S25)。演算器は、主電源が停電したときに、補助電源の電力供給によって、複数の作業区分のうち、主電源が停電した時点での作業区分の作業を終えるまでロボット本体に作業を継続させる(S27)。演算器は、主電源が停電した時点での作業区分の作業を終えたときに、主電源の停電が復旧するまでロボット本体による作業を停止させる(S28)。演算器は、主電源の停電が復旧したとき、ステップS27の処理にてロボット本体に行わせた作業区分の次の作業区分からロボット本体に作業を再開させる(S30,S31,S22)。
(もっと読む)
ドア把持装置及び方法
【課題】小型化されたツールを用いる双腕ロボット単体のみで、ドアを傷つけないように把持することが可能な、ドア把持装置及び方法を提供すること。
【解決手段】双腕ロボット11は、ドア91等の重力方向の力を受ける荷重受けとしてのドアH受け部材(その構成要素であるウレタンパッド42)と、ドアを把持する第1把持治具23R1と、を備えている。第1把持治具23R1は、2点PA,PBの相対距離が可変な、ドア91の開口部120等に当接する2つのドア把持パッド53,54を有している。一方のドア把持パッド53は、ドアの荷重方向の力を受ける方向に開口部の点PAに当接し、他方のドア把持パッド54は、荷重受け(ウレタンパッド42)とドア把持パッド53とにより発生するモーメントを受ける方向に開口部の点PBに当接する。
(もっと読む)
干渉チェック方法及びロボット制御装置
【課題】ロボットアームと部品給材装置との干渉の有無を確実に発見する手段を提供する。
【解決手段】1方向に動作するロボットアーム100の移動方向と速さとを定めたベクトルデータであるロボットアーム並進速度データと、1方向に動作するワーク搬送装置の移動方向と速さとを定めるベクトルデータである部品給材装置200の並進速度データとから計算される相対速度データに基づく拡大処理から得られる拡大済み干渉ボリュームデータを生成する。拡大済み干渉ボリュームデータと、ロボットアーム100の形状データあるいは部品給材装置200の形状データとを、ロボットアームの位置姿勢データ及び部品給材装置200の位置姿勢データに従って、ロボットアーム100と部品給材装置が干渉の有無を確認する交差判定計算を行い、干渉の有無を判断する。
(もっと読む)
サスペンションアッセンブリ取り付け方法
【課題】サスペンションアッセンブリを車両ボディに接近させていく過程でダンパーが車両ボディ側と干渉する場合でも、外部センシング機器を用いずに、その干渉を回避してサスペンションアッセンブリを車両に取り付けることのできるサスペンションアッセンブリ取り付け方法を提供すること。
【解決手段】サス整列・搭載ロボット4の上昇と同期させて、下廻り締付・ダンパー挿入ロボット5によりダンパーの位置を必要に応じて変更することで、ボディに対するダンパーの干渉を回避する。所定の高さに到達したとき、ダンパー取付孔13L,13Rの位置に関連して動作するエンジンルーム内締付ロボット6のエンドエフェクタ61の位置を測定し、測定した位置からダンパー取付孔の位置を算出し、算出した位置を下廻り締付・ダンパー挿入ロボットに伝送し、伝送された位置に応じてダンパーをダンパー取付孔に位置合わせする。
(もっと読む)
干渉検出方法及び干渉検出装置
【課題】2台のロボットが作業する際に、ロボット同士の干渉の有無を短時間で検出することを可能にするロボットの干渉検出方法及び干渉検出装置を提供すること。
【解決手段】第1多関節ロボット50a及び第2多関節ロボット50bの作業時におけるサンプリング時間ごとの姿勢を求め、第1多関節ロボット50aの各姿勢と第2多関節ロボット50bの各姿勢とを総当たりに比較し、第1多関節ロボット50a及び第2多関節ロボット50aの姿勢の干渉の有無を検出する干渉検出装置10において、基準サンプリング時間taよりも長く設定した区切り時間tbごとに、作業時における第1多関節ロボット50a及び第2多関節ロボット50bの距離を求め、区切り時間tbのそれぞれの中で用いるサンプリング時間を当該距離に応じて基準サンプリング時間taより長く設定する第1サンプリング時間設定部88を備える。
(もっと読む)
産業用ロボットの速度位置解析システム及び産業用ロボットの速度位置検出装置
【課題】従来の産業用ロボットの速度位置解析システムは、ドリフト安定度の高い慣性センサからの慣性信号に基づいて産業用ロボットの位置等を検出するように構成しているので、高価な慣性センサが必要となり、部品コストの増大の要因になっている。
【解決手段】本発明による産業用ロボットの速度位置解析システムでは、移動制御部20は、産業用ロボット1を静止させているときにデータ蓄積部30に対して静止情報20aを入力する。データ蓄積部30は、静止情報20aを検出したときの慣性信号11aのデータに関連付けて静止情報20aを記憶する。速度位置後解析部31は、静止情報20aが関連付けられている慣性信号11aのデータに基づいて求められる産業用ロボット1の速度をゼロとする補正値を求めて、求めた補正値を用いて慣性信号11aのデータを補正して産業用ロボット1の速度及び位置を求める。
(もっと読む)
ロボットセル
【課題】複数のロボットステーションを組み合わせて構築したロボットセルにおいて、各ロボットステーションのスペース効率の改善、タクトの向上、ロボットステーション内の機材の使用効率の改善を目的とする。
【解決手段】ロボットステーションは、一対のロボットアーム101,102と、ロボットアームのワークスペースに対して撮像面を平行に撮像手段を固定するブース104を備える。撮像手段としてのカメラ106の視野を、隣接するロボットステーションのワークスペースである架台の天盤103aまで広げる。さらに、各ロボットステーションに搭載されるロボットアームの可動範囲を、隣接するロボットステーションのワークスペース内に広げる。
(もっと読む)
部品組み付け装置及び機械部品の製造方法
【課題】エア源を使用することなく、部品を組み付けることが可能な部品組み付け装置及び機械部品の製造方法を提供する。
【解決手段】第1のアーム12aの先端部に第1のハンド51aを有し、第1のハンド51aを用いて第1の部品を保持する第1のロボット11aと、第2のアーム12bの先端部に第2のハンド51bを有し、第2のハンド51bを用いて第1の部品に組み付けられる第2の部品を保持する第2のロボット11bと、を備え、第1のハンド51bは、第1の部品又は第2の部品を上方から押さえる押さえ部材74を有し、第2のハンド51bは、第2の部品に形成された孔に挿入され、第2の部品を保持する支持ピン55、56を有する。
(もっと読む)
ロボット制御装置
【課題】マニピュレータA、BおよびポジショナPを並行起動して、2パスのアーク溶接作業を実行させるロボット制御装置において、教示データをマニピュレータAとポジショナPの組合せ、またはマニピュレータBとポジショナPの組合せにより独立して作成する場合、一方の教示データに対して教示点の編集操作を行ったときに他方の教示データにも同様の編集操作を行う必要がある。
【解決手段】教示対象設定部6は、複数の制御対象の中からティーチペンダントTPによって選択された複数の制御対象を教示対象として設定する。教示データ合成処理部8は、選択された複数の教示データを合成して1つの再生データTdを生成する。教示データ自動修正部9は、一方の教示データに対する編集操作が行われたときに、編集操作の内容に応じて他方の教示データを自動的に修正する。教示工数の低減及び教示ミスの防止が期待できる。
(もっと読む)
ロボット制御装置
【課題】複数の教示データを並行に起動して複数の制御対象の同期を取る方法では、同期ズレが発生する場合がある。
【解決手段】複数の制御対象A、B、Pを同期させて駆動するロボット制御装置1である。教示対象設定部6は、複数の制御対象の中からティーチペンダントTPによって選択された1つまたは複数の制御対象を、教示対象として設定する。教示対象作成処理部7は、教示対象毎に教示データを作成する。教示データ合成処理部8は、選択された複数の教示データを合成して1つの再生データTdを生成する。解釈実行部11は、再生データTdに基づいて複数の制御対象を同時に駆動する。教示作業は所望の制御対象毎に行い、これらを合成した再生データTdに基づいて再生運転することにより、教示作業が行いやすく、且つ再生運転時に同期ズレが発生することがないロボット制御装置を提供することができる。
(もっと読む)
干渉判定装置および干渉判定方法
【課題】干渉のない立体交差を考慮しつつも、干渉判定を短時間で行う。
【解決手段】
識別番号を各部位に割り当てる識別番号割当部421と、干渉情報を格納する干渉情報格納部412と、干渉条件情報を格納する干渉条件情報格納部413と、ロボットの動作する空間を2次元平面上に投影した上で、2次元平面をn1×n2のマス目に区切るマス目管理部424と、対応マス目を特定し、占有情報を対応マス目ごとに記録する占有情報記録部425と、占有情報および干渉条件情報の桁ごとの論理積を求め、論理積の全ての桁が「0」なら干渉無しと判断し、少なくとも一つの桁が「1」なら干渉有りと判断する判断部426と、を備える。干渉情報は、立体交差する際に干渉を伴わないなら「0」、干渉を伴うなら「1」を表す。
(もっと読む)
ロボットセル装置及び生産システム
【課題】一対のロボットアームの協調動作可能領域を広くすることができ、作業性のよいロボットセル装置を提供する。
【解決手段】ワークが載置される平面視四角形状の平面8を有する架台1を備える。各ロボットアーム2,3の基端部2a,3aが、架台1の平面8の4隅部8A,8B,8C,8Dのうち互いに対角位置の2隅部8A,8Bのそれぞれに固定される。そして、架台1の平面8上の空間に一対のロボットアーム2,3で協調動作可能な協調動作可能領域が形成される。
(もっと読む)
ワーク搬送システム
【課題】より簡易な構成で生産性の高い生産ラインを構築できるワーク搬送システムを提供する。
【解決手段】搬送装置10、11は、レール軌道14、15の上にそれぞれ独立して移動する複数の搬送ロボット16a〜16dを有し、各搬送ロボットは、ワーク12を保持するハンド17a〜17dを備える。例えば、搬送ロボット16aが保持するワーク12に対して、作業装置18aが直接組立作業や加工処理を行い、作業終了後に搬送ロボット16aが下流方向へ移動し、隣接する次工程の搬送ロボット16bとの間でワーク12の受渡しを行う。次工程の搬送ロボット16bは同様の動作を行い、ワーク12を矢印で示す下流方向へ順次搬送する。隣接する搬送ロボットとのワーク受渡し位置を変更することで、生産ラインの高速化を図ることができる。
(もっと読む)
自動溶接方法及び装置
【課題】 母管に複数の枝管を溶接する溶接処理に要する時間を低減させる。
【解決手段】 母管1の長手方向に延びるガイドレール12に、多関節ロボット14に枝管溶接機4を備えた溶接モジュール13と、別の多関節ロボット16にセンサ装置17を備えたセンシングモジュール15を、独立に往復動可能に取り付ける。母管1に、複数の枝管2a〜2nを取り付ける場合は、母管1の長手方向一端側より他端側へ並ぶ各枝管2a〜2nについて、センシングモジュール15のセンサ装置17によるセンシング作業を順次行ない、それぞれの位置計測結果の情報を制御装置18に一旦記憶する。センシングモジュール15による溶接順序が後の枝管2b〜2nについてのセンシング作業と並行して、溶接モジュール13により、制御装置18より得た位置計測結果の情報を基に枝管溶接機4の位置を制御しながら各枝管2a〜2nの母管1への溶接作業を行わせる。
(もっと読む)
生産システム
【課題】本発明は、段取り換えを容易にでき、1つのロボットの動作に複数の機能を備え、省スペース化された生産システムを提供する。
【解決手段】ワーク13と、前記ワーク13が載置されたワークストッカ12と、前記ワークストッカ12の搬出口に配置された双腕ロボット11と、前記双腕ロボット11の胴体前方に対向するように配置された第2のロボット21とから構成されたものである。
(もっと読む)
ポジショナを備えたロボットシステム
【課題】本発明では、ロボットとポジショナを用いてフットプリントを小さくするロボットシステムを提供する。
【解決手段】作業対象物10と、前記作業対象物10に対して作業するロボット5、6と、前記作業対象物10を位置決めするポジショナ7、8とを備え、前記ポジショナ7、8の枠体24上に前記ロボット5、6を備えたものである。
(もっと読む)
制御装置、ロボット、ロボットシステム及びロボットの追従制御方法
【課題】移動するワークに追従して作業する複数のロボットのワークに対する追従能力をそれぞれ高めることのできる制御装置、及びロボット、及びロボットシステム、及びロボットの追従制御方法を提供する。
【解決手段】ロボットコントローラー6は、コンベヤー1により搬送されるワークに対して追従動作を行なう順番を上流側及び下流側に配置されたロボット4,5にそれぞれ設定する。ロボットコントローラー6は、各ロボット4,5のロボットがそれぞれワークに対して追従動作を行なう追従領域を各ロボットの別に設定する追従領域設定部15と、各ロボット4,5がそれぞれワークに対して追従動作を行なう順番を決定する追従順番決定部12と、決定された各ロボットの追従動作を行なう順番を記憶する第1及び第2追従順番記憶部13a,13bとを備える。
(もっと読む)
双腕ロボット
【課題】汎用性が高く複雑な組立作業ができる双腕ロボットを提供する。
【解決手段】第1アーム1は、第1ハンド2と第1視覚センサ3を有し、第1力センサ4を搭載する。第2アーム5は、第2ハンド6と第2視覚センサ7を有し、第2力センサ8を搭載する。各視覚センサ3、7で鏡筒9及び固定筒10の位置を検出して把持し、中央の組立エリア13に搬送する。フレキ9aの位置を第1視覚センサ3で測定し、フレキ9aを固定筒10の中に通し、固定筒10と鏡筒9を、力センサ4、8の出力を用いた力制御で嵌合して組み立てる。各視覚センサによって検出されたワークの位置座標を、ロボット座標に変換して各ハンドの軌道を計算し、各アームを駆動することで、2つのアームの協調動作を実現する。
(もっと読む)
ロボットの教示データを作成する方法およびロボット教示システム
【課題】ロボットの教示データを作成する方法およびロボット教示システムにおいて、ロボットアームを含むロボットの教示を簡単に行うことができるものを提供する。
【解決手段】単眼カメラ30およびステレオカメラ40が、教示者10の手首22および手21を含む教示画像を取得する(教示画像取得ステップ、ステップS1)。制御装置200は、教示画像に基づいて、手首22の位置および向きを表す手首座標を決定し(手首座標決定ステップ、ステップS2)、手首座標に基づいて、ロボットアーム110の動作を教示するロボットアーム教示データを作成する(ロボットアーム教示データ作成ステップ、ステップS11)。
(もっと読む)
1 - 20 / 187
[ Back to top ]