
Fターム[3C007LW00]の内容
マニピュレータ、ロボット (46,145) | 具体的な制御方法 (336)
Fターム[3C007LW00]の下位に属するFターム
フィードフォワードを用いるもの (19)
補償要素を用いるもの (17)
過去のデータを用いるもの (96)
オブザーバを用いるもの (40)
PID制御 (14)
最適化制御 (25)
パルス制御 (1)
人工知能 (4)
学習制御 (68)
遺伝的アルゴリズム (5)
ファジィ (1)
ニューラルネットワーク (20)
Fターム[3C007LW00]に分類される特許
21 - 26 / 26
位置制御装置、位置制御方法及び位置制御プログラム
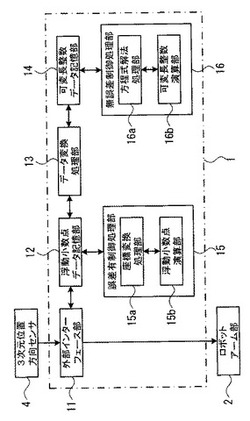
【課題】リンク機構の制御動作を安定化及び高信頼化することができるとともに、リンク機構を高精度に制御することができる位置制御装置を提供する。
【解決手段】データ変換処理部13は、ロボットアーム21の先端部の目標データPから関節角度θを求める解法処理に使用される係数aij及び係数biを浮動小数点データ形式から可変長整数データ形式へ変換し、無誤差制御処理部16は、可変長整数データ形式の係数aij及び係数biを用いて除算を除く加減算及び乗算からなる無誤差演算を実行して係数a6ii及び係数b6iを求め、データ変換処理部13は、係数a6ii及び係数b6iを可変長整数データ形式から浮動小数点データ形式へ変換し、誤差有制御処理部15は、上記解法処理において浮動小数点データ形式の係数a6ii及び係数b6iを用いて1回のみの除算を含む浮動小数点演算を実行することにより浮動小数点データ形式の関節角度θを求める。
(もっと読む)
ロボット制御装置

【課題】 ロボットの教示軌跡の追従性を向上する。
【解決手段】 非作動時のコンベア110上の作業対象物1に対する教示作業による軌跡上の点ごとにインデックスを設定すると共に各インデックスごとにロボット全軸の軸角度の記憶が行われる記憶手段7と、コンベアの動作量に応じて各インデックスのロボット全軸の軸角度を修正する修正手段8と、修正後のロボット全軸の軸角度に基づいてロボットを追従させる線形処理による制御と、各軸ごとの制限加速度に従って動作速度を決定する非線形処理による動作制御とを選択する制御切り替え部9と、を備え、非線形処理に際し、ロボット各軸ごとに、各々の制限加速度に従う動作速度の移動量から、修正後の記憶手段における近似又は一致するインデックスをそれぞれ特定し、その中で最も移動量の少ないインデックスに記憶されたロボット全軸分の軸角度に基づいてロボットの制御を行う。
(もっと読む)
データ及び計算の二重化、駆動系の照合によるロボットの操作方法
【課題】 保存データの内容破壊や化けに対処でき、システム破損や動作上の計算が狂った場合や駆動系が経時変化等で正しく動作しなくなった場合においても不具合を生じさせない、データ及び計算の二重化、駆動系の照合によるロボットの操作方法を提供する。
【解決手段】 ロボットの固定データをバックアップデータとして予めメモリ上に格納しておき、装置の運転開始時に、読み込んだデータとバックアップデータとを照合させる工程と、ロボットの操作状況を画像認識すると共に検算用データを取得する工程と、画像認識の結果によりロボットの補正動作を行うと共にロボットの補正移動後の座標を取得する工程と、ロボットの補正移動後の座標データと検算用データとを照合する工程と、からなることを特徴とする。
(もっと読む)
エフェクタの軌道を制御するための方法
【課題】エフェクタの操作を簡略化し、追加的な制御制約条件の適用を可能にするエフェクタ軌道の制御方法を提供する。
【解決手段】本発明の提供するエフェクタ軌道を制御するための方法は、軌道の不変制御パラメータを求めるステップと、不変制御パラメータを含まないタスク記述によりエフェクタ軌道を表すステップと、タスク記述に基づいてエフェクタ軌道を制御するステップと、を含む。また、この方法において、エフェクタ軌道は、増分値を制御パラメータ空間から配置空間上にマッピングすることによって計算される。配置空間および制御パラメータ空間の間の次元差は、零空間の冗長な自由度を残している。
(もっと読む)
ロボット装置及びその動作制御方法
【課題】 ユーザ等のコミュニケーション対象をより飽きさせることのないカオス的な動作を自身の身体性に基づいて発現することが可能なロボット装置及びその動作制御方法を提供する。
【解決手段】 自己モーション算出器12は、全関節角の時系列情報に基づいて、自身の動作のみに由来する動きベクトルを算出する。モーション混合器13は、この自身の動作のみに由来する動きベクトルに基づいて入力画像の動きベクトルを補正することで、自身の動作のみに由来する動きベクトルとユーザの動作のみに由来する動きベクトルとが所望の比率で混合された動きベクトルを生成する。そしてBR抽出器14は、生成された動きベクトル等から動き特徴量を抽出し、動作生成器15は、動作ルールベース記憶器16に記憶された動作ルールベースを参照しながら、抽出された動き特徴量に応じた動作を生成する。
(もっと読む)
ロボット制御方法及びプログラム
【課題】ロボット動作計画時の非参照状態変数の存在に伴うマルコフ性の欠如を補償し、時間的コスト及び計算機コストの削減を行うロボット制御方法及びプログラムを提供する。
【解決手段】外部指示により設定される指示入力値u0に応じた興奮度uを興奮性神経素子11を用いて生成する興奮度生成手順と、この興奮度生成手順で生成された興奮度uに基づいて、非参照状態変数に関する非ホロノミックロボット20への制御入力値yを制御入力値設定部12を用いて設定する入力値設定手順と、この入力値設定手順で設定された制御入力値yに基づいて、興奮度生成手順で生成された興奮度uを漸減的に抑制する制御を、状態フィードバック値生成部13及び疲労性神経素子14を用いて行う興奮度抑制手順とを循環的に実施する。
(もっと読む)
21 - 26 / 26
[ Back to top ]