
Fターム[3C007LW12]の内容
マニピュレータ、ロボット (46,145) | 具体的な制御方法 (336) | 学習制御 (68)
Fターム[3C007LW12]に分類される特許
1 - 20 / 68
加工ロボットの軌道追従装置と方法
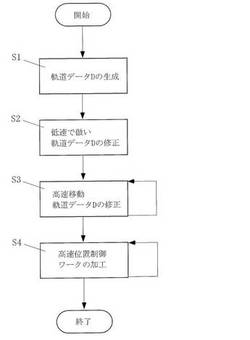
【課題】従来の倣い制御または力制御による加工速度を超える高速で、ロボットアームの追従遅れなしに、高精度の加工をすることができる加工ロボットの軌道追従装置と方法を提供する。
【解決手段】(A)ワークのCADモデルから軌道データを生成して記憶装置に記憶し、(B)加工前に、軌道データに沿って、加工速度より低速の倣い速度で、ワークを加工することなくワークを倣い、その動作位置から軌道データを修正して目標軌道を設定し、(C)次いで、目標軌道に基づき、ワークと接触させることなく加工速度で加工工具を位置制御して、軌道データを再修正する学習を繰返して加工に使用する目標軌道データとして記憶し、(D)加工時に、学習後の軌道データに基づき、加工速度で加工工具を位置制御してワークを加工する。
(もっと読む)
加工ロボットの軌道追従装置と方法

【課題】従来の倣い制御または力制御による加工速度を超える高速で、ロボットアームの弾性変形や加工工具の減耗の影響なしに、高精度の倣い加工をすることができる加工ロボットの軌道追従装置と方法を提供する
【解決手段】(A)ワーク1のCADモデルから軌道データDを生成して記憶装置24に記憶し、(B)軌道データDを目標軌道として加工工具3を位置制御するとともに動作中の加工反力を計測しておき、(C)加工後に、計測した加工反力の計測値から目標押付力で動作するように目標軌道を修正する学習を実施し、この加工と学習を繰返す。
(もっと読む)
移動ロボット、移動ロボット用の学習システムおよび移動ロボットの行動学習方法
【構成】 移動ロボット10は、周囲反応情報データベース88を備え、イベント会場や街中などの人と共存する様々な環境に配置され、案内および荷物運搬などの様々なサービスを提供する。そして、サービスを提供する際には、複数種類の移動の仕方によるサービスの提供を試み、自身の行動に対する周囲の人の反応状況から適切な行動を学習して、その後のサービスの提供に生かす。
【効果】 周囲の人の反応状況から適切な行動を学習するので、人と共存する環境において効果的にサービスを提供できる。
(もっと読む)
ロボットによるサービス提供システム、ロボット管理装置及びロボット管理方法
【課題】人間のように柔軟性の高い知識構造を実現可能とする。
【解決手段】ロボット3によるサービス提供システム1は、それぞれ異なる性質の情報元から得られる情報に基づいて各レイヤーが生成され、かつ、各レイヤーにおいて、所定の観点から要素間の関係性が構築されている複数のレイヤーであって、当該複数のレイヤーを備える知識NW11と、ユーザからの要求タスクに含まれる情報に基づいて、知識NW11が備えるレイヤーから前記情報に関連する要素を抽出し、その抽出した要素と前記情報との関係性を記述することで、要求タスクに応じたタスクベースオントロジーを生成するオントロジー生成部12と、生成したタスクベースオントロジーを用いて、ロボット3の動作を制御するロボット動作制御部13と、を備える。
(もっと読む)
学習制御システム及び学習制御方法
【課題】他からの教示を効率的に覚えることができ、かつ、教示された内容を試行錯誤に組み合わせながら学習を行なうことができる学習制御システムを提供する。
【解決手段】学習制御システムは、報酬を得たときの一連の状態・行動対の集合をイベント・リストとして保持するイベント・リスト・データベース105と、状態・行動対をイベント・リスト・データベースに記憶させるイベント・リスト管理部101と、各イベント・リストの要素である状態・行動対の報酬期待値を更新するイベント・リスト学習制御部107と、イベント・リストを使用して第1の行動価値関数を求める行動計画部108と、強化学習に基づいて第2の行動価値関数を求める強化学習部111と、該行動計画部から受け取った第1の行動価値関数及び該強化学習部から受け取った第2の行動価値関数に基づいて行動を選択する行動選択部113と、を備える。
(もっと読む)
ロボットの制御装置およびロボットを制御する方法
【課題】ロボットがラフな寄り付きでそのまま精密な作業をすることができるための作業教示データ修正方法、および装置を提供する。
【解決手段】ロボットが行うべき作業対象物に対する作業手順を記憶する作業手順記憶手段と、再生時のロボットと作業対象物との相対的位置及び相対的姿勢が、別の位置及び姿勢となったことを位置・姿勢検出手段によって検出したことに応じて、位置及び姿勢の変化量を獲得し、算出値に基づいて作業手順を修正する作業手順修正手段とを備え、修正される作業手順が、接触状態検出手段によって検出された作業対象物の位置及び姿勢をもとに得られる、ロボットを基準とした座標から作業対象物を基準とした座標への同次変換行列を用いてロボットを基準とした座標上での作業手順として与えられる、ロボットの制御装置。
(もっと読む)
学習制御ロボット
【課題】本発明は、学習制御機能を持つロボットの学習稼動の動作中、もしくは学習後の実稼動の動作中に例外処理が起きた場合に対処可能な学習制御ロボット及び再学習可能な学習制御ロボットを提供することを目的とする。
【解決手段】本発明の学習制御ロボットは、ロボット機構部と、作業プログラムを実行することにより、ロボット機構部の位置偏差に関するデータを取得して、ロボット機構部の位置偏差を所定の値以下とするための学習補正量を計算する学習制御を実行する学習制御部と、学習制御の実行中に、データを取得するためにロボット機構部の学習稼動を実行し、学習制御の実行後に、学習制御部が計算した学習補正量に基づいて、ロボット機構部の実稼動を実行する通常制御部と、学習稼動の実行中又は実稼動の実行中において例外処理が起きた場合に、例外対処を実行する例外対処部と、を有することを特徴とする。
(もっと読む)
学習歩行ロボット装置及びその制御プログラム
【課題】床面の状態が大きく異なりあるいは大きく変化するような領域でも安定した移動を可能とする学習歩行ロボット装置及びその制御プログラムを提供する。
【解決手段】所定領域内のそれぞれの位置における床面の硬さ指標を測定する手段21と、それぞれの位置を表す位置情報と硬さ指標とを対応付けて硬さ情報として保存する手段41と、所定領域内の学習歩行ロボット装置の現在位置を同定する手段35と、同定された現在位置における床面の硬さ指標を硬さ情報から決定する手段36と、決定した床面の硬さ指標に基づいて歩行形態を選択して歩行動作を制御する手段22〜28とを有し、手段21は、学習歩行ロボット装置が直立した姿勢を保持したまま足首の関節ロール軸アクチュエータを駆動したときのアクチュエータに流れる電流値に基づいて、アクチュエータに流れる電流値が大きいほど床面が硬いとする硬さ指標を対応付ける。
(もっと読む)
学習制御機能を備えたロボット
【課題】大部分の現場において、学習制御器の調整は経験に基づいて試行錯誤で行われており、調整が難しいという問題があった。
【解決手段】本発明のロボットは、位置制御の対象とする部位にセンサを備えたロボット機構部と、ロボット機構部の動作を制御する制御装置とを含むロボットであって、制御装置は、ロボット機構部の動作を制御する通常制御部と、作業プログラムによりロボット機構部を動作させて、センサによって検出した前記ロボット機構部の制御対象位置を通常制御部に与えられた目標軌跡もしくは位置に近づけるために学習補正量を算出する学習を行う学習制御部と、を有し、学習制御部は、学習稼動状態で設定可能な最大速度オーバライドを算出し、最大速度オーバライドに至るまで複数回に渡って速度オーバライドを増加させながら学習補正量を算出する学習を行うことを特徴とする。
(もっと読む)
多関節拮抗制御マニピュレータ
【課題】人間の筋骨格系制御特性を生かし、制御自由度や精度、制御速度を共に満足できる多関節拮抗制御マニピュレータとその制御方法を提供する。
【解決手段】多関節マニピュレータは、中央制御装置10と、多関節マニピュレータ16本体とを有する。多関節マニピュレータ本体16は、人工骨格18と、筋ワイヤ20〜30と、筋ワイヤ制御用モータ32,34を備える。筋ワイヤ20〜30は、二関節筋ワイヤ20,22と、一関節筋ワイヤ24〜28から構成される。中央制御装置10は、記憶装置に記憶された制御関数によって前記一関節筋制御用モータと前記二関節筋制御用モータを併用拮抗制御する。
(もっと読む)
ロボット装置、ロボット装置の行動制御方法及びプログラム
【課題】 学習対象物の共有(共同注意)を可能として、適切に学習対象物を特定することを可能にする。
【解決手段】 ロボット装置は、学習対象物を特定する学習対象物特定手段として機能するセグメンテーション処理部132及び学習対象物検出部133が特定した学習対象物の情報を連想想起記憶部に記憶し、行動制御部により、新たな検出した物と連想想起記憶部に記憶した学習対象物の情報とに基づいて行動をする。
(もっと読む)
応答戦略獲得装置、リアクション選択装置、コンピュータプログラム、及びロボット
【課題】アクションからリアクションが生成される関係を確率モデルとして捉えて、この確率モデルを同定することで、ロボットが自律的に応答戦略を獲得できるようにする。
【解決手段】イニシエーター1が行ったイニシアティブアクションaiに対するリアクションbjを観測することで、イニシアティブアクションaiに対するリアクター2のリアクションbjの出力の仕方を示す応答戦略Z(bj,ai)を獲得する応答戦略獲得装置13であって、複数の種類のイニシアティブアクションaiそれぞれをリアクションbjの発生原因とした場合の当該リアクションの発生時刻sにおけるリアクション発生確率Wai,sを取得し、これらのリアクション発生確率Wai,sに基づいて、当該リアクションbjの選択確率Z(bj,ai)を算出する選択確率推定部22を備えている。
(もっと読む)
感性モデル装置、感性モデルの性向学習装置及び方法
【課題】 感性モデルの性向特性を適応的に変化させる装置及び方法を提供する。
【解決手段】 本発明の一態様による感性モデル装置は、性向情報を有している。そして、この性向情報に基づいて感情を生成し、該生成された感情に応じて特定の行動を取ることが可能である。本発明の一態様によって、性向情報は、行動に対するユーザ応答によって適応的に変更される。したがって、ユーザとの相互作用によって感性モデルが能動的に反応しうる。
(もっと読む)
粒子フィルタを使用した多指ロボットハンドのための接触状態推定
【課題】粒子フィルタを使用して、ロボットハンドが触れようとする対象物の位置、向き及び形状を特定する。
【解決手段】 ロボットハンド20が触れようとする対象物の位置、向き、及び形状を同定するための方法は、粒子フィルタを使用する。その方法は、適切な動きモデルと、測定値モデルを定義する。動きモデルは、ロボットハンド20が対象物に対して移動するときの、その動きを特徴としている。測定値モデルは、接触位置、速度、及び触覚センサ情報が与えられるハンド/対象物状態の観測の可能性を推定する。測定値モデルは、幾何学モデルに基づいて、又は集成トレーニングデータに基づいて、解析的に近似される。いずれの場合も、測定値モデル分布は、ガウス分布として符号化されるか、又は放射基底関数を使用して符号化される。
(もっと読む)
ロボットの制御方法
【課題】ワークの状態に応じてロボットの挙動を精度良く制御する方法を提供する。
【解決手段】ワークを移動するロボットの制御方法にかかわる。手部にワークを把持させてロボットを駆動するときの手部の挙動を検出し、複数種類のワークを移動するときのロボットの挙動に関する情報を記憶する学習工程と、ワークの属性を検出する属性検出工程と、ワークの属性と挙動の情報とを用いてロボットの制御条件を設定する制御条件設定工程と、ロボットがワークを移動する移動工程と、を有する。
(もっと読む)
対物行動推定装置およびサービス提供システム
【構成】 対物行動推定装置10は、コンピュータ30を含み、環境に設置された位置検出システム12によって検出される人間(16)および対象物(18)の位置情報に基づいて、環境内に存在する人間が特定の対象物に対してどのような行動を行っているかを推定する。コンピュータ30は、位置検出システム12から、人間および対象物の所定時間分の位置履歴データを取得し、この位置履歴データを用いて人間および対象物との相互間に関する特徴量を算出する。そして、算出した特徴量を判別式に与えることにより、人間の対物行動を推定する。
【効果】 特定の対象物に対する人間の行動を短時間で推定できるので、その行動に素早く対応したサービスを提供できる。
(もっと読む)
模倣学習のためのタスク固有の表現の自動選択を備えたロボット
【課題】模倣学習に優れたロボットの制御方法を提案すること。
【解決手段】該ロボットの環境におけるエンティティの動きを観察するステップと、感覚データストリームを用いて該観察した動きを記録し、該記録した動きを、異なるタスク空間表現で表現するステップと、前記模倣学習のために前記タスク空間表現の一部を選択し、模倣されるべき該動きを再現するステップであって、該タスク空間表現の一部は、該動きを再現するため、1つのタスク空間表現を含み、または、一連の異なるタスク空間表現を含む、ステップと、を含む方法を用いる。
(もっと読む)
脳情報出力装置、ロボット、および脳情報出力方法
【課題】精度の高い意図検出ができなかった。
【解決手段】意図識別子と、一の意図の元にユーザがトライアルを行った際に当該ユーザの頭蓋外部から取得された第一学習データを、脳内の脳活動データに変換された第二学習データから、抽出された1以上の特徴量である学習特徴量群とを対に有する意図判別情報を、2以上格納し得る意図判別情報格納部と、ユーザの頭蓋外部から第一脳活動データを取得する第一脳活動データ取得部と、第一脳活動データを脳内の脳活動データに変換し、第二脳活動データを取得する第二脳活動データ取得部と、第二脳活動データから、1以上の特徴量である入力特徴量群を取得する特徴量群取得部と、入力特徴量群に対応する意図識別子を2以上の意図判別情報から取得する意図識別子取得部と、意図識別子を出力する意図識別子出力部とを具備する脳情報出力装置により、精度の高い意図検出ができる。
(もっと読む)
ロボット装置におけるスキーマの学習と使用
【課題】環境との相互作用時の挙動に優れた自律移動ロボット制御方式を提供する。
【解決手段】スキーマを使用し、該スキーマは、ロボットが設定されたゴールを達成するようにするための、パラメータで表した運動指令の系列の集合であって、該系列のためのパラメータは、該ロボットコントローラの状態変数から得られ、該ロボットコントローラへ知覚入力を供給するためのインタフェースと、スキーマ認識モジュールからの入力、または逆方向モデルモジュールからの入力、またはそれらの組み合わせを供給されるスキーマ状態メモリと、状態変数及び格納されたスキーマに基づいて、運動指令を生成する逆方向モデルと、状態変数及び格納されたスキーマに基づいて、状態変数を予測する順方向モデルと、該ロボットコントローラによって制御された該ロボットの、供給された状態変数に基づいてスキーマを選択するスキーマ認識モジュールと、を備えた。
(もっと読む)
ロボット、ロボットの駆動制御方法
【課題】ロボット間の干渉や衝突を防止する。
【解決手段】駆動プログラムに従って駆動させるロボットの駆動制御方法であって、前記駆動プログラムに従って前記ロボットを駆動させ、前記ロボットの駆動状況を検出するとともに、検出した駆動状況を駆動状況データーとして記録し、前記駆動状況データーに基づいて、前記駆動プログラムを更新し、前記更新された駆動プログラムに従って前記ロボットを駆動させる。
(もっと読む)
1 - 20 / 68
[ Back to top ]