
Fターム[3C007LW08]の内容
マニピュレータ、ロボット (46,145) | 具体的な制御方法 (336) | 最適化制御 (25)
Fターム[3C007LW08]に分類される特許
1 - 20 / 25
ロボットの制御方法およびロボットの制御装置
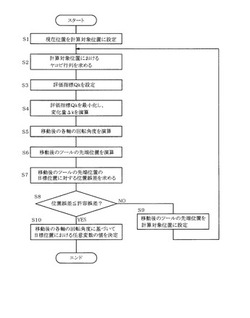
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間と、移動後のツールの先端位置の目標位置に対する位置誤差とに基づく評価指標を設定し、その評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
多関節ロボットアーム型搬送装置の軌道情報生成装置

【課題】始点から終点までの搬送対象物を直線移動させるにあたり、移動時間の短縮と振動の低減とを両立した軌道情報生成装置を提供する。
【解決手段】多関節ロボットで搬送対象物を直線移動させるにあたり、搬送装置103の動力学モデルに基づいて始点Sから終点Eまでの移動に要する時間teをパラメータの一つとして含む評価関数の値が最小となるように最適化手法を用いて軌道情報132を生成する。動力学モデルとして搬送対象物Wを搬送する先端リンクの動作を直線動作に限定したモデルを予め設定しておき、予め設定された搬送装置の振動特性を用いて先端リンクの移動により生じる模擬振動の大きさ(x−xa)を算出し、算出した模擬振動の大きさ(x−xa)をパラメータの一つとして評価関数に含め、少なくとも上記2つのパラメータである移動時間te及び模擬振動の大きさ(x−xa)を含む評価関数の値が最小となるように軌道情報132を生成する。
(もっと読む)
ロボットおよび制御システム
【課題】
連続状態変数および離散状態変数の組み合わせ最適化問題の解導出の高速化を図ることができる制御システム等を提供する。
【解決手段】
内部モジュールmod1による行動候補ai1の探索範囲(第1探索範囲)は、低周波の外部モジュールmod2による外部行動候補ai2の探索範囲(第2探索範囲)よりも狭くすることで、その分だけ演算処理が早くなる。これにより、ロボットRの状態測定値に鑑みて、ロボットRが外乱に緊急に対応する必要がある場合、低周波の外部モジュールmod2の演算処理結果を待たずに、高周波の内部モジュールmod1の演算処理結果にしたがってロボットRの動作が制御されうる。
(もっと読む)
移動装置の軌道情報生成装置
【課題】所望の始点から終点までの移動時間の短縮と移動によって生ずる振動の低減とを両立した軌道情報を生成する新たな軌道情報生成装置を提供する。
【解決手段】軌道情報生成装置2は、所望の始点から終点まで移動装置103を移動させるための軌道及び軌道上の速度に関する軌道情報132を生成するにあたり、予め設定された移動装置の振動特性を用いて移動により生ずる模擬振動の大きさ(θ3−θa)を算出し、算出した模擬振動の大きさ(θ3−θa)をパラメータの一つとし、始点Sから終点Eまでの移動に要する時間teをパラメータの一つとして、少なくともこれら2つのパラメータを含む評価関数の値が最小となるように最適化手法を用いて軌道情報を生成する。
(もっと読む)
予測不可能で動的な複雑な環境において計画することを伴う自律型ロボット
【課題】予測不可能な複雑な環境においてロボットが動きを行うことを可能にする自律型ロボットの制御方法を提供すること。
【解決手段】ロボットの動き制御のためのコントローラは、到達すべきターゲットに関する情報を該コントローラに供給するターゲット入力インターフェースと、該ロボットの内部モデルを使用して、制御される該ロボットの将来の状態の少なくとも1つを予測する予測モジュールと、前記予測モジュールから供給された予測状態から開始して、該ロボットの将来状態を計画する計画モジュールと、前記制御されるロボットをターゲットに到達させるべく、モータコマンドを出力する反応コントローラと、前記予測モジュールによって出力されたターゲットまたは前記計画モジュールからの出力を選択するターゲットアービトレータと、を備える。
(もっと読む)
ロボット装置及びその制御方法
【課題】消費電力量を抑制しつつ、柔軟に所望動作を実行できるロボット装置及びその制御方法を提供すること。
【解決手段】ロボット装置101は、複数の関節を有するロボット機構110と、ロボット機構110の関節軸を駆動する複数のアクチュエータ109と、を備えている。また、ロボット装置101は、アクチュエータ109に対するトルク指令の関数である評価関数に基づいて、アクチュエータ109の駆動を柔軟に制御するロボット制御装置102を備えている。
(もっと読む)
ロボット制御方法、ロボット制御装置、及びロボット操作装置
【課題】ロボットアームの手先部の制御において、特異点の近傍で関節軸の移動量が極端に大きくなるという事象や、動かなくなるという事象の発生を防ぐ。
【解決手段】 本発明に係るロボット制御方法は、全体の自由度がM次(Mは自然数)であり制御変数の次数がN次(Nは自然数)でありMはN以上であるロボットにおける制御の方法であって、変化を指示された変数の次数をL次(Lは自然数)とすると、上記制御変数のうち、変化を指示された変数を含むL次以上(N−1)次以下の変数のみを厳密制御しそれ以外の変数を曖昧制御することを特徴とする。
(もっと読む)
進化アルゴリズムと模倣学習に基づくロボットの動作制御方法
【課題】ロボットが人間の動作を学習できる進化アルゴリズムに基盤したロボットの動作制御方法を提供する。
【解決手段】本発明は進化アルゴリズムを利用したロボットの動作制御方法に関するものである。本発明は人間の動作パターンを収集してデータベースを構築する段階と、主成分分析及び逆動力学基盤の補間法を利用した遺伝演算子を利用して前記データベースを進化させる段階と、前記進化したデータベースを利用してリアルタイムでロボットの動作を生成する段階を含むロボットの動作制御方法を提供する。
本発明によると進化したデータベースを利用してロボットが人間の運動を学習し、最適化した動作をリアルタイムで制御することができる。
(もっと読む)
移動体の入力決定手段、及びその手段を有するハイブリッド車両と多関節移動ロボット
【課題】将来状態の予測が困難なハイブリッド車両や移動ロボットでも、最適制御問題を解いて特定動作における損失の最小化を図る。
【解決手段】入力決定手段15は外部入力11と出力12とを入力とし、内部入力16を生成する。移動体10は冗長性を持ち、ある外部入力11に対応する出力12を生成する方法が複数個あるものを対象とする。内部入力16は入力決定手段15により、予め決められた評価関数を最小または最大になるように決定される。入力決定手段15は将来状態予測手段21、最適化演算手段22、制約条件判定手段23を有する。最適化演算結果通知手段27は最適化演算で得られた解が実行不可能な場合そのことを外部に通知するために設けたものであり、LED、液晶表示、メモリなどとして実現される。これは開発時のデバッグを容易にするのみならず、オフライン診断としても使用する。
(もっと読む)
ロボット動作計画方法及び装置
【課題】CP制御を行うロボットに関する動作計画方法及び同方法を用いる装置において、冗長性を利用できる範囲内での姿勢変化を解としてメタヒューリスティックス手法を適用して、作業経路の全ての点において障害物を回避できる動作計画を自動作成する。
【解決手段】本発明に係るロボット動作計画方法は、ロボットの自由度が作業に必要な自由度より大きい場合に、エンドエフェクタがワークに設定された作業経路上の複数目標点間を順次補間して動作するためのロボット各軸の速度を分解速度制御法を用いて導出する方法であって、一つの目標点からその次の目標点への動作にて、上記各軸速度の冗長自由度成分が、ロボット上の任意の位置に設定された座標系での上記エンドエフェクタの速度ベクトルを満たす各軸速度成分を含むことを特徴とする。
(もっと読む)
ロボットの作業動作最適化装置
【課題】少ない作業試行数で迅速に最良の作業指令を自動的に決定することのできるロボットの作業動作最適化装置を得る。
【解決手段】作業結果評価部3は、ロボット部1の動作結果を観測し、動作結果が適切なものであるかを評価する。改良作業指令候補発生部4は、ロボット部1の動作が最も好ましいものになると推定される作業指令の候補を発生させると共に、作業指令の候補を発生させたことによるロボット部1の動作状態に対する作業結果評価部3の評価結果に基づいて新たな作業指令を発生させ、これを繰り返すことで最適化された作業指令を求める。
(もっと読む)
衝突回避機能を有するロボット
【課題】視覚センサ手段を利用したロボット用衝突回避技術が提供される。
【解決手段】少なくとも1つの視覚センサを備えるロボットの制御方法であって、該方法は、前記ロボットのモーションに対する目標を規定するステップと、前記ロボットが前記目標に到逹するために適切なモーション制御信号を算出するステップと、前記ロボットのセグメントと視覚センシング手段および目標の間の仮想対象物との最も近いポイントに基づいて衝突回避制御信号を算出するステップと、モーション制御信号と衝突回避制御信号とを結合させるステップと、仮想対象物によって規定された空間に前記ロボットのセグメントが入らないように、結合された信号によって前記ロボットのモーションを制御するステップと、を備え、算出された衝突危険がより低くなるほど、モーション制御出力信号の重み付け値が高くなる。
(もっと読む)
ロボットのモーションの発生及び制御のための装置ならびに方法
【課題】本発明は、制御ポイントのシーケンスを最適化する問題に対処して、包括的な最適化基準を実現する制御方法を提供する。
【解決手段】本発明によると、少なくとも一つのエフェクタを有するシステムまたはロボットの制御方法は、制御ポイントの初期シーケンスを算出することと、制御ポイントに基づいた内部シミュレーションを用いて、包括的な費用関数に対してシステムを評価することと、前記評価に基づいた制御ポイントのセットを更新することと、の各ステップを備え、与えられた終了基準が充足されるまで、最後の2つのステップが繰り返される。
(もっと読む)
ロボットの対話型挙動の制御
【課題】ロボットの対話型挙動の制御を提供すること。
【解決手段】挙動の目標をセレクタ・ユニットに定義し、セレクタ・ユニットが目標に到達するための複数の挙動命令をそれぞれ発生させ、各々の命令に対して、前記機械的システムの対応する結果として得られる動作を、機械的システムの一体化した部分であるコンピューティング・ユニットによって、内部的にシミュレートする。シミュレートされた結果として得られた動作の各々の適応度を、少なくとも1つの目的に関して評価し、最高の適応度値を有するシミュレートされた動作が得られた命令を、機械的システムの物理的アクチュエータに送り、知能的機械的システムの挙動を制御し、複数の自由度からなる異なる動作挙動を行うことができる。
(もっと読む)
移動ロボット
【課題】 始点と終点の間に巡回点があっても、計算時間を短縮するとともに、メモリの消費量を抑えて、さらに用途に合わせて、巡回点を通るような最適な経路を生成できるようにする。
【解決手段】 経路計画部6は、地図情報および巡回点の情報を受け取る入力受付部11と、情報から巡回点の巡回順序を決定する巡回順序決定部12と、巡回点間の経路探索を行って全経路を生成する巡回点間経路計画部13と、巡回点間経路計画部13から得られた経路について、同一巡回点を複数回通過するかチェックし、同一巡回点を複数回通過する場合には巡回順序を修正して巡回点間経路計画部13にて経路探索を再実行させ、修正前後の経路のうち短い方を最終的な全経路として出力する経路修正部14と、全経路に沿って移動ロボットを動作させる命令を生成するコマンド生成部15からなる。
(もっと読む)
制御装置
【課題】繰り返し試行する時間を省くことで力制御ゲインの設定及び調整を容易に行うことができる制御装置を提供する。
【解決手段】力制御回路7の内側に位置制御回路8を有する力制御システムによりロボット1を力制御する制御装置において、ロボット1を駆動する実際の制御条件で、ロボット1の個々の駆動軸に関する位置制御回路8の時定数Tを取得する時定数取得手段11と、ロボット1を駆動する実際の制御条件で、ロボット1の剛性値Kを取得する剛性値取得手段12と、力制御回路7の時定数が位置制御回路8の時定数Tより大きくなる条件で、時定数取得手段11で取得された位置制御回路8の時定数Tと剛性値取得手段12で取得された剛性値Kとから力制御回路7の力制御ゲインを算出するゲイン自動算出手段10と、を備える。
(もっと読む)
制御システム及び制御方法、並びにコンピュータ・プログラム
【課題】複数の剛体が連なって構成される多リンク構造物が、単一平面以外の複数の面に接触しながら移動する場合や、宙に浮く場合など色々な外界との接触状態にあっても、該リンク構造物の運動を安定化する。
【解決手段】系全体の運動量が長期にわたって発散しないことが安定化規範として有効であるということに着眼し、並進運動量並びに角運動量の目標値との偏差を評価する安定化評価関数を定義し、この安定化評価関数を最小化するような力やモーメントなどの最適制御入力を決定し、この最適制御入力が発生する最適運動量を算出し、この最適運動量を実現するためのリンク構造物の関節駆動方法を決定する。
(もっと読む)
移動体制御方法および移動体
【課題】3次元環境内の状態を移動体の動作との関係で適切に分類し、記憶データ量を少なくすると共に、移動体の走行時の処理負担を軽減できる移動体制御方法を提供する。
【解決手段】環境クラス分類部34において、グリッドマップデータGMおよびフロア高さデータFHを基に、2次元座標(x、y)の各々についてその状態を分類した変数env_type(x,y)を生成する。次に、パス決定部36において、ロボット1の移動過程において、ロボット1の2次元位置(x、y)に応じて、それに対応した上記状態を特定し、その状態に予め対応付けられた処理部35_1〜35_6を選択してロボット1の動作を駆動させる。
(もっと読む)
機械の移動可能な機械要素の運動案内方法
本発明は、制御装置(8)において動作する次のステップ、すなわち、a)機械要素(9)によって実行されるべき移動運動(XV)および最適化基準(OpK)が入力されるステップ、b)運動特性(Xsollk(t))が機械要素(9)によって実行されるべき移動運動および最適化基準(OpK)に基づいて決定されるステップ、c)位置目標量(Xsoll(n))が運動特性(Xsollk(t))により決定されるステップ、d)機械要素(9)の移動運動を実行するために調節部(6)に位置目標量(Xsoll(n))が出力されるステップを有する機械の移動可能な機械要素(9)の運動案内方法および制御装置(8)に関する。本発明は、使用者が直接に運動案内の最適化に影響を及ぼすことのできる機械の移動可能な機械要素の最適化された運動案内のための簡単な方法および簡単な制御装置を提供する。 (もっと読む)
ロボットプログラムの最適化方法及びロボット制御システム
【課題】運転条件及びロボットシステムに係るパラメータだけでなくロボットプログラムを最適化する方法及び制御システムを提供する。
【解決手段】ロボットの性能を最適化するための装置及び方法は、ロボットコントローラが経路プログラムを実行したときにロボットの性能データを受信するためにロボットコントローラに接続されたコンピュータを有する。コンピュータは、性能データ、ユーザが定義した最適化目標及び制約、並びに運動学的動的シミュレータを利用し、コントローラ内の制御システムパラメータをデフォルトのセットから新たなセットに置換する。コンピュータは、制御システムパラメータの新たなセットが最適化されるまで処理を反復する。
(もっと読む)
1 - 20 / 25
[ Back to top ]